具有高階運動的機動目標微多普勒信號提取方法
2015-03-08 05:31:14李彥兵高紅衛李寶柱葉春茂
電波科學學報 2015年3期
關鍵詞:信號
李彥兵 高紅衛 李寶柱 葉春茂
(北京無線電測量研究所,北京100854)
引 言
雷達目標在運動時,若自身存在諸如翻滾、進動等動作,或者目標上存在相對于目標主體的運動部件,如直升機的旋翼、人四肢的擺動等,這些運動被稱為微動.當雷達發射波照射目標時,微動會對雷達回波產生調制現象,被稱為微多普勒效應.美國海軍實驗室的V.C.Chen教授對典型的微運動形式——旋轉和振動進行了系統地分析,并將微多普勒效應這一概念首次引入雷達領域[1].他們的工作使得人們加深了對雷達領域中微多普勒調制現象的理解,使得針對微多普勒的研究逐漸成為雷達領域的熱點[2-8].事實上,對于自然界中的許多物體,不論是人造的還是自然的,是機械還是動物,在其運動時都能夠產生微多普勒調制現象.由于不同的物體其微動形式是有差異的,這些差異性通過微多普勒效應反映在雷達回波中.因而,對于微多普勒效應的研究能夠為我們提供關于雷達目標的更多信息,為現有的雷達目標識別方法提供一個新的途徑,或成為現有一些成熟識別技術的有力補充.
若目標運動時具有微動,則微動引起的微多普勒調制會疊加于目標整體的平動之上,體現為以目標多普勒為中心,分布于兩側的一系列多普勒頻率分量[1].為了提取目標的微多普勒,需要對目標的整體運動進行補償.實際中,目標運動時通常是機動的,即目標的速度是時間的變量,因此目標的多普勒頻率不再是常量.當目標加速度恒定時,多普勒隨時間呈線性變化,雷達回波信號具有線性調頻的特點,可以通過Chirp-Fourier變換方法進行運動補償[9],提取目標微多普勒;當目標加速度隨時間變化時,目標整體運動引起的多普勒是隨時間變化的曲線,對于這類存在高階運動分量的運動補償,Chirp-Fourier變換等方法不再適用.本研究工作即是針對存在高階運動情況下,目標的微多普勒提取技術.
1 經驗模態分解簡介
經驗模態分解(Empirical Mode Decomposition,EMD)對信號進行分解時,并不預先設定一組基,其分解出的各分量信號是直接從信號中獲得的.其分解結果隨著信號特性的變化而變化,分解得到的分量被稱為本征模態函數(Intrinsic Mode Function,IMF)[10-11],IMF并沒有被約束成為一個單頻信號,也并沒有被約束成為一個窄帶信號,且可以是頻率和幅度調制的.因此,在經驗模態分解中,IMF是一個可以包含一定帶寬的基本信號.EMD的分解結果即是由一系列頻率由高到低的IMF分量所構成.
EMD算法包含兩個嵌套的循環,如圖1所示.其中,內循環是EMD分解的核心,可以形象地稱為“篩”過程.給定一個信號s,“篩”過程的實現步驟如下[10-11]:

圖1 EMD的算法流程
6)令~s=m,并重復步驟2)至步驟6),直到m成為一個IMF.
當得到了一個IMF后,將該IMF從原信號中減去,得到余項q=s-m.將余項q視為新的待分解信號,對其重復進行“篩”過程,便能得到一系列IMF,這就是EMD的分解過程,它包含兩個嵌套的循環,內循環生成IMF分量,外循環則生成最終的分解結果.在內循環中,相鄰“篩”過程得到的兩個結果記為mk-1和mk,對應標準差定義為
式中,T為信號長度.為保證IMF在幅度和頻率調制上有足夠的物理意義,設定SD在0.2和0.3之間時為內循環終止條件.外循環的終止條件是余項q為一單調函數.最終,可以得到信號s的分解形式為

式中:mi表示第i個IMF;qL為經過L次分解后的余項.
由EMD的分解過程可以看出,EMD每次分解出的IMF信號都是基于上一次分解后的剩余信號,整個分解過程僅涉及信號本身,不需其他額外假設和先驗信息,因而EMD分解是自適應的.此外,由于IMF是具有一定帶寬的信號,且在同一瞬時點上相鄰兩個IMF的頻率沒有重疊,各IMF的頻率是遞減的,當整個分解過程結束時,就可以得到信號的趨勢項.
2 微多普勒信號提取算法
假設僅考慮雷達回波的相位變化,不考慮幅度起伏,則單散射點目標的回波為

式中:t為時間;fc為雷達載頻;τ為信號時延.
對回波信號混頻,且令τ=2Rt/c,則混頻后的回波信號為
式中:Rt為目標相對雷達的斜距;c為光速;λ為雷達發射波波長.
假設散射點目標的整體運動具有加速度和加加速度,且存在運動形式為旋轉的微動.則目標相對于雷達的斜距Rt為隨時間變化的量為

式中:R0為散射點目標旋轉中心距離雷達的初始距離;v為目標速度;a為目標加速度;ξ為目標加加速度;r為散射點旋轉半徑;ω為旋轉角速度;φ為旋轉初相.
由式(5)可知,目標的運動帶來斜距的變化,斜距的變化帶來目標回波中相位的變化,從而引起多普勒頻率.
圖2給出典型基本運動引起的多普勒頻率隨時間變化的時頻分布圖.結合圖2進一步分析,式(5)中的第2,3,4項是目標整體運動,引起目標回波中的多普勒調制.其中,第2項是速度引起的多普勒頻率,表現為目標多普勒頻率的整體偏移,如圖2(a)所示;第3項是加速度引起的多普勒頻率,表現為目標多普勒頻率的線性傾斜,如圖2(b)所示;第4項是加加速度引起的多普勒頻率,表現為目標多普勒頻率的彎曲,如圖2(c)所示.式(5)中的第5項是旋轉微動引起的距離變化,帶來回波中以正弦形式變化的微多普勒頻率調制.將以上基本運動復合,可以得到散射點目標的多普勒頻率時頻分布如圖2(d)所示.可見,具有微運動的機動目標引起的多普勒頻率調制是復合運動引起的,運動中既包含整體平動分量,也包含微動分量.對于微多普勒信號提取,整體平動引起的多普勒頻率調制為干擾項,需對其進行補償.

圖2 機動目標的基本運動分解
由以上分析可知,微多普勒調制疊加于目標多普勒調制之上,微多普勒調制相對于目標多普勒調制通常是快變量,而多普勒調制則更接近于趨勢項.因此,利用EMD的自適應分解特性,有可能將快變的微多普勒信號與慢變的多普勒信號分離,提取出目標的整體多普勒頻率變化情況,從而實現對目標整體運動的補償以及目標回波信號中微多普勒信號的提取.
目標回波信號包含的微多普勒信號提取算法流程如圖3所示,包括如下步驟:
1)對雷達回波信號進行短時傅里葉變換(Short-Time Fourier Transform,STFT),得到信號的時頻分布;
2)記錄每一時刻目標時頻分布的峰值位置;
3)根據峰值位置計算目標的瞬時頻率值,得到目標的瞬時頻率隨時間的變化;
4)對目標瞬時頻率向量進行EMD分解,得到余項;
5)由余項計算補償相位值;
6)對雷達回波信號進行相位補償,消除目標整體運動的影響,得到目標的微多普勒信號.

圖3 微多普勒提取算法流程
算法的關鍵在于利用EMD對瞬時頻率信號進行趨勢項的提取,以及對目標整體平動的補償.假設目標的瞬時多普勒頻率為fd(t),由式(2)可得目標的瞬時多普勒頻率分解為

式中,分解結果中的余項fbulk(t)為目標瞬時多普勒頻率的趨勢項,可以作為目標整體平動的估計.進一步,可以利用該估計值對目標整體平動多普勒進行補償,從而完成微多普勒信號的提取.
由以上分析可以看出,基于EMD的自適應特性,該算法并不涉及目標的運動模型,也不需要估計目標的運動參數即可實現運動補償.這在實際應用中是有利的.
3 實驗結果
3.1 仿真實驗
首先使用仿真實驗對提出的算法進行驗證.仿真中的參數設置如下:雷達載頻為6GHz,脈沖重復頻率為1 000Hz,目標初始速度為-7m/s,初始加速度為1m/s2,加加速度為2m/s3,散射點旋轉角速度為50rad/s,旋轉半徑為0.04m.
單散射點機動目標的微多普勒提取結果由圖4給出,同時對比了基于Chirp-Fourier變換的補償方法[9].從圖4(a)中可以看出,由于存在加速度及加加速度,目標的多普勒隨時間呈曲線變化,微多普勒疊加于多普勒之上.經過對回波瞬時多普勒頻率的估計,并利用EMD算法對目標整體運動進行估計的結果如圖4(b)所示.圖中還給出了目標整體平動多普勒的理論真值.可見,利用文中所提方法,能夠較準確地估計出目標的整體平動多普勒頻率,從而實現目標整體平動的運動補償.圖4(c)給出經過運動補償后,提取的目標微多普勒信號的時頻分析.可見,利用文中提出的方法較好地補償了目標的整體平動,微多普勒信號提取達到了較好的效果.圖4(d)給出了基于Chirp-Fourier變換的微多普勒信號提取結果.由于目標存在加加速度,即目標運動存在高階項.而Chirp-Fourier變換方法僅針對目標存在加速度時的運動補償,因此,盡管Chirp-Fourier變換方法對目標的整體平動有補償效果,但卻無法完全補償由高階運動項帶來的目標多普勒頻率彎曲現象.
3.2 實測數據實驗
研究工作還基于實測數據.我們使用雷達測量系統記錄了某高速機動目標的雷達回波信號.該次測量中,觀測到了較為明顯的微動現象.
實測目標的微多普勒信號提取結果如圖5所示.從圖5(a)中的時頻分布可以看出,目標的多普勒頻率隨時間呈曲線變化,說明目標的運動中包含高階運動項.利用文中所提方法對目標的整體平動多普勒估計結果如圖5(b)所示,可見,目標的整體平動多普勒被較好地估計了出來.利用文中所提方法和Chirp-Fourier變換方法對目標微多普勒信號的提取結果分別如圖5(c)和圖5(d)所示.可見,Chirp-Fourier變換方法對目標的整體平動僅進行了部分補償,提取出的微多普勒信號中依然殘留有目標的整體平動多普勒.對比而言,文中所提方法取得了較好的運動補償效果,由目標高階運動項帶來的頻率彎曲現象也得到了補償,從而較好地提取出了目標的微多普勒信號.
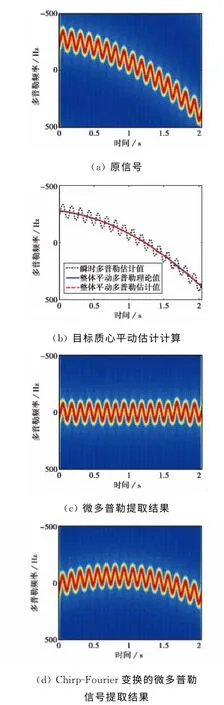
圖4 單散射點目標微多普勒提取結果

圖5 實測目標微多普勒信號提取結果
4 結 論
具有高階運動的目標,其整體平動引起的多普勒頻率隨時間呈曲線變化,現有的基于目標加速度的補償方法并不能取得較好的平動補償效果.EMD算法具有對信號的自適應濾波特性,將這一自適應分解方法應用于目標整體平動多普勒的估計以及目標整體平動的補償,可以獲得較好的效果,實現目標微多普勒信號的提取.經過仿真實驗和實測數據的驗證,表明了采用EMD方法進行目標微多普勒信號提取是有效的.
[1]CHEN V C,LI F,HO S S,et al..Micro-Doppler effect in radar:phenomenon,model,and simulation study[J].IEEE Transactions on Aerospace and Electronic System,2006,42(1):2-21.
[2]LUO Y,ZHANG Q,QIU C,et al.Micro-Doppler effect analysis and feature extraction in ISAR imaging with stepped-frequency chirp signals[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(4):2087-2098.
[3]RAM S S,CHRISTIANSON C,KIM Y,et al..Simulation and analysis of human micro-Dopplers in through-wall environments[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(4):2015-2023.
[4]賈守卿,江小敏,夏明耀.基于微多普勒特征的目標分類[J].電波科學學報,2013,28(3):443-447.JIA Shouqing,JIANG Xiaomin,XIA Mingyao.Target classification by micro-Doppler feature[J].Chinese Journal of Radio Science,2013,28(3):443-447.(in Chinese)
[5]李開明,張 群,梁必帥,等.卡車目標遮擋效應建模及微多普勒特征分析[J].電子與信息學報,2013,35(9):2114-2120.LI Kaiming,ZHANG Qun,LIANG Bishuai,et al.Occlusion modeling and micro-Doppler characteristic analysis for truck target[J].Journal of Electronics &Information Technology,2013,35(9):2114-2120.(in Chinese)
[6]楊 儉,侯海平,曲長文,等.機載下視陣列合成孔徑雷達成像的微多普勒效應[J].電波科學學報,2012,27(5):1049-1055.YANG Jian,HOU Haiping,QU Changwen,et al.Micro-Doppler effect for airborne downward-looking array SAR imaging[J].Chinese Journal of Radio Science,2012,27(5):1049-1055.(in Chinese)
[7]楊有春,童寧寧,馮存前,等.彈道中段目標回波平動補償與微多普勒提取[J].中國科學:信息科學,2013,43(9):1172-1182.YANG Youchun,TONG Ningning,FENG Cunqian,et al.Translation compensation and micro-Doppler extraction of the echo from ballistic targets in midcourse[J].Science China Information Sciences,2013,43(9):1172-1182.(in Chinese)
[8]關永勝,左群聲,劉宏偉.基于微多普勒特征的空間錐體目標識別[J].電波科學學報,2011,26(2):209-215.GUAN Yongsheng,ZUO Qunsheng,LIU Hongwei.Micro-Doppler signature based cone-shaped target recognition[J].Chinese Journal of Radio Science,2011,26(2):209-215.(in Chinese)
[9]XIA X.Discrete chirp-Fourier transform and its application to chirp rate estimation[J].IEEE Transactions on Signal Processing,2000,48(11):3122-3133.
[10]HUANG N E,SHEN Z,LONG S R,et al.The empirical mode decomposition and the Hilbert spectrum for non-linear and non stationary time series analysis[J].Proceedings of Royal Society,1998,454:903-995.
[11]DELECHELLE E,LEMOINE J,NIANG O.Empirical mode decomposition:an analytical approach for sifting process[J].IEEE Signal Processing Letters,2005,12:764-767.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
