曲線合成孔徑雷達三維成像研究進展與展望
2015-03-07 08:34:16峰楊陽董臻梁甸農
雷達學報 2015年2期
何 峰楊 陽董 臻梁甸農
①(國防科學技術大學電子科學與工程學院 長沙 410073)
②(中國空氣動力研究與發展中心 綿陽 621000)
曲線合成孔徑雷達三維成像研究進展與展望
何 峰*①楊 陽②董 臻①梁甸農①
①(國防科學技術大學電子科學與工程學院 長沙 410073)
②(中國空氣動力研究與發展中心 綿陽 621000)
曲線合成孔徑雷達(CLSAR)是當今雷達遙感研究的新領域,近年來針對CLSAR的研究多集中于3維點目標特征提取和曲線孔徑設計。該文對已有的CLSAR 3維點目標特征提取算法和孔徑設計方法進行了分類,在介紹基本原理的基礎上,比較了各種方法的優缺點,闡述了其中的關鍵問題。最后對CLSAR目標3維成像與特征提取、曲線孔徑設計的發展前景進行了展望。
曲線合成孔徑雷達(CLSAR);目標3維特征提取;孔徑設計;RELAX算法
1 引言
合成孔徑雷達(Synthetic Aperture Radar, SAR) 作為一種有效的全天時、全天候的遙感手段被廣泛地應用于軍事和民用領域。目前投入使用的大多數SAR系統沿直線孔徑運動,只具備2維成像能力。在實踐中,存在很多應用需要利用到目標的3維特征信息,3維信息更有利于雷達目標的自動檢測和識別,從而大大減少人工判讀的工作量。
實際上,平臺沿直線軌跡運行的要求并非合成孔徑所必需,平臺沿曲線運動形成的合成孔徑也是較常見的現象[1,2]。曲線合成孔徑雷達(CurviLinear SAR, CLSAR)正是利用雷達平臺在方位-高度平面的曲線運動形成曲線孔徑,在高度和方位向同時形成大的合成孔徑,從而具有高程分辨能力,克服了干涉SAR存在的高度模糊缺陷,是一種具有實際意義的3維成像系統[3-7]。CLSAR是一種工作在類似聚束模式下的新型微波對地觀測技術,與常規SAR相比,除在孔徑上有所差別外對雷達系統無額外要求,因此它可以作為多模態SAR系統平臺的一種模式使用[8]。
一種特殊的CLSAR形式是圓跡合成孔徑雷達(Circular Synthetic Aperture Radar, CSAR)[4,9],它以雷達平臺環繞場景的360°圓周運動獲取場景的360°全方位觀測信息,從而實現超高分辨率成像,并且具備一定的3維成像能力。相對于CLSAR, CSAR對平臺的運動提出更嚴格的要求,而CLSAR則靈活性更強,利用CLSAR進行目標3維特征提取也是雷達遙感領域的難點問題。有關CSAR的發展概況在文獻[4]中已有詳盡描述,本文將重點關注一般形式CLSAR 3維成像的發展狀況。
一方面,設計有效的特征提取算法是進行目標3維特征提取的關鍵,另一方面,目標特征估計精度決定于雷達參數、觀測幾何和目標位置等因素,設計能獲得最優特征估計精度的曲線孔徑也是CLSAR研究的重要方面。由于CLSAR在3維空間的采樣不是完整而是稀疏的,采用直接的FFT變換重建的目標圖像具有極高旁瓣,不具有實際應用意義[5]。已有的目標重建方法主要是基于譜估計的參數化方法,如CLEAN[5,6], IMP[7], ML[7], RELAX[3,7,10], PML[11,12]等以及為降低運算量[13,14-17]、考慮存在運動誤差情況[18-21]的改進算法。在孔徑設計上,文獻[22,23]提出以參數估計的CRB下限為評價指標來指導孔徑設計,文獻[24]則通過對各種形狀孔徑的性能進行仿真,得到關于孔徑形狀的初步結論。
總體上講,CLSAR自提出發展至今已有10多年,但仍有不少待解決的問題,已有的重構算法存在局部優化等問題,在孔徑設計上還缺乏足夠的理論分析和研究。本文主要分析現有方法的原理,指出CLSAR研究存在的關鍵問題,并展望可能的研究方向。本文第2節簡略介紹CLSAR研究歷程中的重要進展,第3節是CLSAR數據模型簡介,第4節綜述CLSAR 3維目標特征提取算法和孔徑設計方法,第5節展望CLSAR未來進一步研究的可行方向。
2 CLSAR研究進展
1994年,美國海軍地面戰中心(naval surface warfare center)的Knaell[5]博士首次論證了CLSAR的可行性,提出了成像算法,并通過實驗得到了幾種孔徑形狀下最初的重建結果。1997年,佛羅里達大學的Li等人[10]詳細推導了全孔徑和曲線孔徑下的數據模型,提出利用RELAX方法進行目標重構,給出了參數估計的CRLB (Cramer Rao Low Bound)。1999年,Li等人[19]針對存在飛行誤差的情況,設計了一種能夠同時進行運動補償和目標特征提取的AUTO-RELAX算法,通過仿真證明在存在運動誤差情況下新算法能大幅降低估計誤差。2004年,蘇志剛等人[13]利用散射點的距離參數和垂直于距離方向上參數之間的弱耦合性將散射點位置估計解耦為順序估計,仿真表明該算法在降低運算復雜度的同時沒有造成性能損失。2005年,蘇志剛等人[14]利用前述思想提出了一種非迭代方法,能夠進一步降低運算的復雜度。2006年,Liu等人[25]提出了一種方位維條帶、高度維聚束的復合模式CLSAR,能夠在保持高度分辨率的同時進行大測繪帶觀測。同年,唐智[24]根據信號模型對幾種典型曲線孔徑進行了仿真,根據仿真結果提出了關于孔徑最優設計的初步結論。蘇志剛等人[22]利用參數估計中的CRB下限,推導了不依賴于目標特征的孔徑評價指標,為孔徑的設計提供了指導。2008年,蘇志剛等人[26]將Capon波束形成方法應用到目標重建中,提出了一種非參數自適應方法,該方法能有效壓縮目標旁瓣,消除目標遮掩。近年來,張子善[3]、龐守寶[27]等學者也進一步在曲線SAR 3維成像結構、降維RELAX算法等方面提出了自己的見解。
3 CLSAR數據模型
CLSAR成像系統觀測幾何如圖1所示。被成像區域為地面上由數個點目標組成的3維區域。以被成像區域中心為原點建立坐標系,X,Y,Z軸正方向分別代表斜距方向、方位方向和高度方向。曲線孔徑由雷達平臺以中心斜距Ro繞坐標原點運動形成。R表示雷達平臺與(x,y,z)處散射點之間的距離為雷達相對坐標系的視角(方位角和仰角),M為觀測視角的數目。在觀測角下,雷達距離坐標中心Rom,距離散射點Rm。
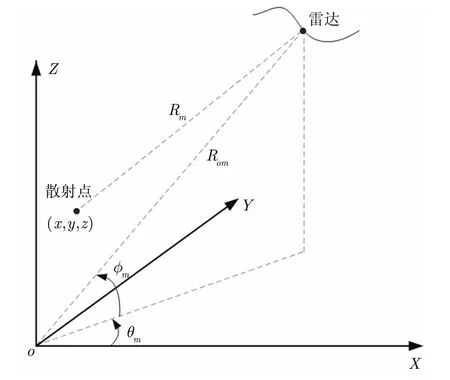
圖1 CLSAR工作幾何圖Fig. 1 The geometry of CLSAR
在遠場成像和θm,φm變化范圍較小的前提下,雷達接收信號經混頻、采樣及距離內插后可以表示為:

式中,K為散射點的數目,αk表示第k個散射點的回波信號強度,e(n,m)表示噪聲和雜波,可見,接收信號在3維波數域(Kx,Ky,Kz)是一個頻率為(xk,yk,zk)的3維復正弦信號,其頻率(xk,yk,zk)對應著第k個散射點的空間位置。
在曲線孔徑情況下,接收信號可以看作對全孔徑波數域數據的采樣,其中采樣矩陣是一個稀疏矩陣,非零元素由曲線形狀決定,并對應于曲線孔徑上的觀測點。全孔徑下的3維目標空間重建就是一個簡單的3維傅里葉變換,曲線孔徑由于是對全孔徑的波數域數據乘上一個稀疏的加權因子Curv_Fac(Kx,Ky,Kz), 3維目標空間重建實際上變成了一個反卷積問題。如果直接對曲線孔徑的波數域數據作FFT,則重建的3維空間目標由于疊加了與Curv_Fac(x,y,z)的卷積,旁瓣將大大變強。大的旁瓣將使所成圖像的分辨效果受到影響,造成虛假目標的,同時旁瓣造成的光斑使大目標在圖像上分裂為多個小的目標。因此,旁瓣的干擾問題在CLSAR的成像過程中顯得尤為突出,甚至直接影響到CLSAR所成圖像的可用性。為減小這些旁瓣的影響,需要考慮其它方法。
在第m個觀測角下,式(1)信號中的每個目標分量可看成1維正弦信號,其頻率為:

則式(1)信號可重新表示為:

因此,在第m個觀測角下,式(1)的接收信號可看作是在噪聲環境中的多個正弦信號的累加。關于目標的3維特征提取問題轉換為參數估計問題,可以利用估計理論進行特征提取和性能分析。
4 CLSAR目標3維特征提取和孔徑設計方法
4.1 RELAX算法
RELAX算法適用于對由數個散射點組成的目標的特征提取。RELAX算法通過最小化非線性最小二乘代價函數
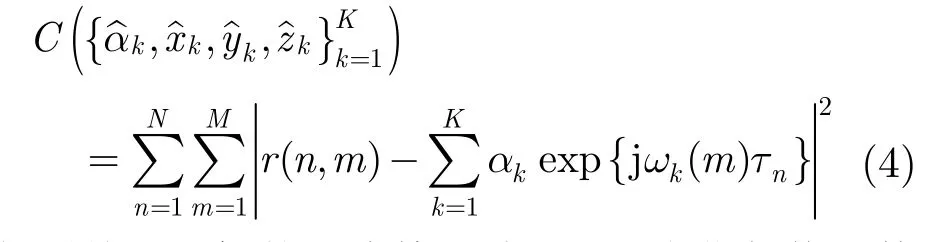
來得到關于目標的3維特征估計。最小化代價函數C是一個復雜的非線性優化問題。RELAX算法利用已估計得到的前K-1個散射點特征對第K個散射點特征進行搜索,而后利用最新得到的散射點特征對前面所有點特征進行更新。散射點的位置特征對應著該點接收數據周期圖峰值所表示的3維頻率,其RCS對應著周期圖峰值幅度。從信號表示理論來看,實際上RELAX算法就是通過不斷增加搜索空間的維數和調整入選的原子信號以期盡量準確捕捉原始信號的本質屬性。該算法的優點是在色噪聲情況下具有較好的統計性能,缺點是搜索尋優的運算量相當大,在得到每一個散射點特征后都需要通過迭代對前面的所有散射點進行更新。在計算接收數據周期圖時需要用到3維傅里葉變換,由于接收數據在3維頻域空間的稀疏性,因此在進行FFT處理時會引入大量零點,這也會大大增加運算復雜度。
4.2 降維RELAX算法
RELAX算法存在的運算復雜度高的缺點,特別是3維傅里葉變換的運算量很大,可以考慮利用接收數據的內在性質,降低傅里葉變換的維數。蘇志剛等人[13]利用接收數據中散射點的距離參數和垂直距離方向的參數之間的弱耦合性特點,將目標的3維位置估計問題解耦為1維距離參數估計和2維方位及高度參數的估計問題,并順序地將其估計出來,在獲得所有散射點的3維特征后再用迭代的方式對估計值進行求精。仿真結果表明,該算法在基本不損失性能的情況下能有效降低運算復雜度。后續又提出了非迭代的降維RELAX算法[14],它克服了原算法求精過程中在估計出每個散射點特征后需要對其它所有目標進行特征更新的步驟,進一步降低了運算量。
4.3 自聚焦RELAX算法
由于存在大氣的擾動和平臺位置的不確定性等因素,導致雷達相對場景中心的位置不能精確測定,進而嚴重影響目標特征提取的性能[19],因此,必須估計出運動誤差(孔徑誤差)和相位誤差(參考點到雷達距離的不確定性)并將其補償。自聚焦RELAX算法能夠在實現運動補償的前提下進行目標特征提取。通過初始目標特征來迭代估計出真實的運動軌跡,并進行運動補償,進而通過RELAX算法實現目標重構。
4.4 非參數化算法
以RELAX算法為代表的CLSAR成像算法都是參數化方法,存在著運算復雜度高、對模型誤差敏感以及需要已知散射點數目等缺陷。蘇志剛等人[26]將譜估計理論中的RCB (Robust Capon Beamforming)方法引進到CLSAR成像中,RCB方法是一種非參數自適應方法,在數據解耦合的基礎上,設計中心頻率為感興趣頻率的低通濾波器,提取目標位置并估計RCS。該方法能夠降低目標間的相互干擾和遮掩效應。
4.5 孔徑設計方法
孔徑最優設計包括孔徑形狀、孔徑尺度和采樣數3方面的優化。早期研究主要是通過直觀比較一些典型非直線孔徑錄取數據的成像性能來選擇較優的曲線孔徑形狀。Brian[28],劉浩[8]等人研究發現,在相同的孔徑跨度范圍上,拋物線形孔徑具有比折線形孔徑更優的成像性能;唐智等人[24]通過對幾種典型飛行軌跡形狀下的目標重構性能進行分析,得出了關于孔徑設計的直觀結論:采樣密集、對稱的孔徑能夠得到更好的目標估計性能。文獻[29]研究了各種路徑對3-D SAR波束特性的影響,認為相比于簡單曲線,同心圓,螺旋圓以及隨機采樣都更加有利于抑制高程角的模糊。CLSAR目標的3維特征提取過程可以等效看作是參數估計問題,蘇志剛等人[22,23]通過引進參數估計中的CRLB,設計評價孔徑性能的指標。理論推導證明RCS的CRLB只依賴于噪聲能量和采樣點數,而3維位置估計的CRLB則取決于不依賴于散射點特征的孔徑參數,進而提取出獨立于特征的孔徑估計器(Feature independent Aperture Evaluator, FAE),說明大尺寸、非線性程度越高(高階多項式曲線)的孔徑能夠更優化估計性能,為孔徑設計第1次提出了理論指導。
以上研究表明:CLSAR為獲取更好的參數估計性能,要對平臺的曲線航跡提出較高要求,大孔徑、非線性程度越高的復雜孔徑(如高階多項式曲線、隨機路徑、螺旋線等)更利于形成“優良”的數據錄取集,從而提高參數的估計精度。
5 CLSAR研究展望
經過10多年的發展,CLSAR在成像算法和孔徑設計研究上都取得了初步的成果,也存在著不少的問題。針對現有研究存在的問題,結合近年來信號處理的最新研究成果,本文歸納如下幾個可行的CLSAR重點研究方向:
(1) 現有成像算法普遍基于RELAX的思想,根據信號表示理論的觀點,RELAX方法是一種逐步迭代的局部優化型方法,實際上是匹配追蹤(Match Pursuit, MP)和交替尺度法相結合的產物,能在一定程度上克服匹配追蹤的弱點,但仍然脫離不了吐故納新算法的范疇,本質上具有與匹配追蹤算法類似的一步優化策略的短視效應,存在得不到全局最優解的問題。CLSAR是一個典型的不完全測量系統,由于測量數據維數小于真實信息的維數,使得由觀測數據還原真實信息是個病態逆過程,不能得到關于真實信息的唯一解,存在不適定性。如果沒有關于欲求解問題的先驗信息,這一本質性的困難是無法克服的。稀疏信號表示尋優為此類問題提供了求解思路,作為一種新興的信號分析方法,它以過完備函數基為基礎,能從有限的觀測數據中獲得信號的稀疏表示,有效地挖掘信號的自然屬性和本質驅動源。利用全局競爭優化的稀疏表示尋優算法(如基尋蹤(Basis Pursuit, BP)方法),能有效利用先驗信息,避免迭代尋優的運算復雜性,得到全局最優解。
(2) 當前成像方法只適用于理想散射點或由其組成的簡單目標,CLSAR在對復雜目標進行大孔徑3維觀測時,為獲取更全面的目標信息,需要基于更為復雜的散射模型對目標進行特征提取。對理想散射點組成的簡單目標情況,其信號可以表示為3維正弦信號,這相當于將接收數據在傅里葉基下進行稀疏展開,再通過稀疏表示尋優算法進行特征提取。但對于具有更為復雜的散射機理的目標,回波中除了點散射機理外,還可能包括各種復雜散射機理,如鏡面散射、諧振、發散性散射等,在傅里葉基下,得不到信號的稀疏表示,需要構造更加貼近信號自然屬性的基函數來稀疏表示目標信號,從而抓住信號的本質。
(3) 目前針對孔徑設計,還缺乏具有普遍理論指導意義的方法。近年來興起的壓縮感知(Compress Sensing, CS)思想[30],可以為孔徑設計提供理論指導。壓縮感知思想原理是基于某些信號具有可壓縮或稀疏表示的本質,通過合理設計基函數和測量矩陣,突破傳統Nyquist采樣定理的限制,獲得遠小于信號維數(N)但包含足夠信號特征信息的采樣(M個線性測量,M?N),并通過優化算法復原信號。該方法的關鍵是找出與基函數矩陣Ψ滿足一定關系的可以用來恢復原信號的測量矩陣Φ。引入該思想到CLSAR的孔徑設計,通過建立以孔徑形狀參數為自變量的系統函數矩陣Φ作為采樣矩陣,結合其與基函數矩陣的相互關系可以設計Φ,進而直接設計最優孔徑形狀。
(4) CLSAR為獲取更好的參數估計性能,要對平臺的曲線航跡提出較高要求,如大孔徑、非線性程度越高的復雜孔徑更利于形成密集的數據錄取集,從而提高參數的估計精度。然而,受平臺飛行性能的限制及從安全角度考慮,過于復雜的航跡是不現實的。大孔徑跨度要求長相干積累時間,在曲線飛行條件下,要長時間地控制成像所要求的運動精度和天線指向精度也是相當困難的。基于此,可以考慮將空變雙/多基地3維觀測方式[31,32]與CLSAR天然的結合[28,33]。在加入雙/多基地觀測這個新手段以后,將曲線孔徑和雙基地空變性這樣兩種3維成像機理有機結合起來,增加了觀測幾何變化的維度,可以實現變化更加復雜的數據錄取曲面,有利于在有限觀測角下記錄更豐富的3維信息。同時,單/雙基地同時觀測可有效縮短曲線長度、降低單條曲線的復雜度,避免長積累時間、復雜運動下運動誤差等因素對成像質量的影響,降低長曲線孔徑和復雜曲線孔徑的實現難度。
6 結束語
CLSAR因其工作模式上的靈活性、能提供目標3維重建信息等獨特優勢近年來受到了國內外學者的廣泛關注。經過10多年的發展,CLSAR在成像算法和孔徑設計研究上都取得了一定的成果,但在理論體系建立和觀測手段上的一些不足制約著其進一步發展。本文的現狀分析和技術展望表明,基于不完全測量系統理論建立以信號稀疏表示為基礎的CLSAR理論體系,可為CLSAR的孔徑設計和信號處理提供更強有力的理論依據和技術手段,而通過突破單基地觀測等系統性限制,可對雷達的觀測矩陣實現更多自由度的優化設計,提升采樣信息量,實現更高質量的3維圖像重構。
[1]王建濤, 秦玉亮, 范波, 等. 曲線彈道SAR RD-Dechirp快視成像算法[J]. 系統工程與電子技術, 2013, 35(5): 940-947. Wang Jian-tao, Qin Yu-liang, Fan Bo,et al.. RD-Dechirp algorithm for curvilinear trajectory SAR quick look imaging[J].Systems Engineering and Electronics, 2013, 35(5): 940-947.
[2]He Feng, Chen Qi, Dong Zhen,et al.. Processing of ultrahigh-resolution spaceborne sliding spotlight SAR data on curved orbit[J].IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2): 819-839.
[3]張子善. 曲線合成孔徑雷達三維成像相關技術研究[D].[碩士論文], 國防科技大學, 2009. Zhang Zi-shan. Research on the 3-D imaging technology of curvilinear SAR[D].[Master dissertation], National University of Defense Technology, 2009.
[4]洪文. 圓跡SAR成像技術研究進展[J]. 雷達學報, 2012, 1(2): 124-135. Hong Wen. Progress in circular SAR imaging technique[J].Journal of Radars, 2012, 1(2): 124-135.
[5]Knaell K. Three-dimensional SAR from curvilinear apertures[C]. Proceedings of SPIE- International Society of Optical Engineering, Orlando, FL, 1994, 2230: 120-134.
[6]Knaell K. Three-dimensional SAR from practical apertures[C]. Proceedings of SPIE-International Society of Optical Engineering, San Diego, CA, 1995, 2562: 31-41.
[7]Knaell K. Three-dimensional SAR from curvilinear apertures[C]. Proceedings of the 1996 IEEE National Radar Conference, Ann Arbor, MI, 1996: 2230-2238.
[8]劉浩, 吳季. 基于曲線合成孔徑雷達的三維目標特征提取[J].遙感技術與應用, 2004, 19(6): 493-497. Liu Hao and Wu Ji. Three dimensional target feature extraction using curvilinear synthetic aperture radar[J].Remote Sensing Technology and Application, 2004, 19(6): 493-497.
[9]宋千, 李楊寰, 梁福來, 等. 圓跡合成孔徑雷達成像分辨率分析[J]. 計算機仿真, 2011, 28(10): 18-22. Song Qian, Li Yang-huan, Liang Fu-lai,et al.. Analysis of circular SAR time-domain imaging resolution[J].Computer Simulation, 2011, 28(10): 18-22.
[10]Li J, Bi Z, Liu Z S,et al.. Use of curvilinear SAR for three dimensional target feature extraction[J].IEE Proceedings-Radar,Sonar and Navigation, 1997, 144(5): 275-283.
[11]Knaell K. Advances in three-dimensional SAR from practical apertures[C]. Proceedings of SPIE-International Society of Optical Engineering, San Diego, CA, 1996, 2845: 183-193.
[12]Knaell K. Progress in three-dimensional SAR from curvilinear apertures[C]. Proceedings of SPIE-International Society of Optical Engineering, San Diego, CA, 1998, 3462: 110-121.
[13]Su Zhi-gang, Peng Ying-ping, and Wang Xiu-tan. Efficient algorithm for three-dimensional target feature extraction via CLSAR[J].Electronics Letters, 2004, 40(15): 965-966.
[14]Su Zhi-gang, Peng Ying-ning, and Wang Xiu-tan. Noniterative imaging algorithm for CLSAR[C]. IEEE International Conference on Acoustics, Speech, and Signal Processing, 2005, 2: 577-580.
[15]Su Zhi-gang, Peng Ying-ning, and Wang Xiu-tan. Fast noniterative imaging algorithm for CLSAR[C]. IEEE International Radar Conference, Arlington, VA, 2005: 778-782.
[16]蘇志剛, 彭應寧, 王秀壇. 曲線合成孔徑雷達中散射點三維特征提取方法[J]. 清華大學學報(自然科學版), 2005, 45(7): 947-950. Su Zhi-gang, Peng Ying-ning, and Wang Xiu-tan. Extraction of 3-D features of scatterers in curvilinear SAR[J].Journal of Tsinghua University(Science&Technology), 2005, 45(7): 947-950.
[17]蘇志剛, 彭應寧, 王秀壇. 三維目標CLSAR成像的降維搜索算法[J]. 電子與信息學報, 2006, 28(6): 965-968. Su Zhi-gang, Peng Ying-ning, and Wang Xiu-tan. Dimensionreduced searching method for 3-D target imaging incurvilinear SAR[J].Journal of Electronics&Information Technology, 2006, 28(6): 965-968.
[18]Su Zhi-gang, Peng Ying-ning, and Wang Xiu-tan. Threedimensional target features extraction method in curvilinear SAR with aperture errors[C]. IEEE International Symposium on Communications and Information Technology, 2005 (ISCIT 2005), 2005, 2: 1227-1230.
[19]Li J, Bi Z, and Liu Z S. Autofocus and feature extraction in curvilinear SAR via a relaxation-based algorithm[J].IEE Proceedings-Radar,Sonar and Navigation, 1999, 146(4): 201-207.
[20]Su Zhi-gang, Wu Ren-biao, Liu Jia-xue,et al.. A robust autofocus algorithm for the 3-D target feature extraction in curvilinear SAR[C]. 2001 CIE International Conference on Radar, Beijing, 2001: 644-648.
[21]吳仁彪, 蘇志剛, 劉家學, 等. 一種基于CLSAR的三維目標特征提取與自聚焦新算法[J]. 遙感學報, 2002, 6(6): 490-495. Wu Ren-biao, Su Zhi-gang, Liu Jia-xue,et al.. A novel autofocus and 3-D target feature extraction algorithm for curvilinear SAR[J].Journal of Remote Sensing, 2002, 6(6): 490-495.
[22]Su Zhi-gang, Peng Ying-ning, and Wang Xiu-tan. Evaluation of the aperture in the curvilinear SAR[C]. 2006 CIE International Conference on Radar, Shanghai, 2006: 1-4.
[23]Su Zhi-gang, Peng Ying-ning, and Wang Xiu-tan. Featureindependent aperture evaluator for the curvilinear SAR[J].IEEE Geoscience and Remote Sensing Letters, 2007, 4(2): 191-195.
[24]Tang Zhi, Li Jing-wen, Zhou Yin-qing,et al.. Research on optimal aperture for curvilinear SAR[J].Journal of Astronautics, 2006, 27(5): 897-903.
[25]Liu Xiang-le and Yang Ru-liang. Study of composite mode curvilinear SAR[C]. 2006 CIE International Conference on Radar, Shanghai, 2006: 1-4.
[26]Su Zhi-gang, Liu Gui-ying, Peng Ying-ning,et al.. RCB-based imaging method for 3-D target via curvilinear SAR[C]. 9th International Conference on Signal Processing, Beijing, 2008: 2368-2371.
[27]龐守寶, 張曉玲, 等. 機載下視圓周SAR三維BP成像[J]. 電子科技, 2010, 23(12): 14-17. Pang Shou-bao, Zhang Xiao-ling,et al.. Imaging of downwardlooking 3D circle SAR by BP algorithm[J].Electronic Science and Technology, 2010, 23(12): 14-17.
[28]Brian D R and Randolph L M. Flight path strategies for 3-D scene reconstruction from Bistatic SAR[J].IEE Proceedings-Radar,Sonar and Navigation, 2004, 151(3): 149-157.
[29]Sune R J and Axelsson. Beam characteristics of threedimensional SAR in curved or random paths[J].IEEE Transactions on Geoscience and Remote Sensing, 2004, 42(10): 2324-2334.
[30]Donoho D L. Compressed sensing[J].IEEE Transactions on Information Theory, 2006, 52(4): 1289-1306.
[31]Chemiakov M. Space-surface bistatic synthetic aperture radar-prospective and problems[C]. International Radar Conference, Edinburgh, UK, 2002: 22-25.
[32]Hu Cheng, Long Teng, and Zeng Tao. The possibility of isolated target 3-D position estimation and optimal receiver position determination in SS-BSAR[J].Science in China Series F:Information Sciences, 2008, 51(9): 1372-1383.
[33]Rigling B D. Signal processing strategies for bistatic synthetic aperture radar[D].[Ph.D. dissertation], Ohio State University, 2003.

何 峰(1976-),男,湖北人,2005年獲得國防科技大學信息與通信工程博士學位,現為國防科技大學電子科學與工程學院副研究員,碩士生導師。近年研究方向為新體制合成孔徑雷達系統與信號處理方法、超高分辨率SAR成像處理等。
E-mail: hefeng@nudt.edu.cn
楊 陽(1984-),男,四川人,2013年獲得國防科技大學信息與通信工程博士學位,現為中國空氣動力研究與發展中心工程師。研究方向為曲線合成孔徑雷達、長時間序列差分干涉SAR等。
E-mail: sunnyyang@nudt.edu.cn
董 臻(1973-),男,安徽人,2001年獲得國防科技大學信息與通信工程博士學位,國防科技大學電子科學與工程學院研究員。研究方向為天基雷達系統與信號處理、差分層析四維成像等。
E-mail: dongzhen@vip.sina.com
梁甸農(1936-),男,湖南人,國防科技大學電子科學與工程學院教授,博士生導師。研究方向為雷達系統與信號處理、自適應陣列天線。
Progress and Prospects of Curvilinear SAR 3-D Imaging
He Feng①Yang Yang②Dong Zhen①Liang Dian-nong①
①(College of Electronic Science and Engineering,National University of Defense Technology,Changsha410073,China)
②(China Aerodynamics Research and Development Center,Mianyang621000,China)
CurviLinear SAR (CLSAR) is increasingly attracting considerable interest in the field of radar remote sensing. Various methods of 3-D target feature extraction and aperture design have been proposed, and these methods are classified in this paper. The basic theories of these methods are systematically studied and compared, and their advantages and disadvantages are summarized. Moreover, the main 3-D target feature extraction and aperture methods are described. Finally, the future research fields of CLSAR are proposed.
CurviLinear SAR (CLSAR); 3-D target feature extraction; Aperture evaluation; RELAX algorithm
TN957
:A
:2095-283X(2015)02-0130-06
10.12000/JR14119
何峰, 楊陽, 董臻, 等. 曲線合成孔徑雷達三維成像研究進展與展望[J]. 雷達學報, 2015, 4(2): 130-135. http://dx.doi.org/10.12000/JR14119.
Reference format: He Feng, Yang Yang, Dong Zhen,et al.. Progress and prospects of curvilinear SAR 3-D imaging[J].Journal of Radars, 2015, 4(2): 130-135. http://dx.doi.org/10.12000/JR14119.
2014-10-28收到,2014-12-05改回;2015-01-07網絡優先出版
國家自然科學基金(61101187)資助課題
*通信作者: 何峰 hefeng@nudt.edu.cn
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年15期)2019-08-27 01:12:00
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
