固定式港口起重機吊裝機構優化設計
2015-03-01 11:33:14劉艷陳驍周城華
機械制造與自動化 2015年2期
關鍵詞:優化設計
劉艷,陳驍,周城華
(南京理工大學 泰州科技學院 機械工程學院, 江蘇 泰州 225300)
?

固定式港口起重機吊裝機構優化設計
劉艷,陳驍,周城華
(南京理工大學 泰州科技學院 機械工程學院, 江蘇 泰州 225300)
摘要:針對固定式港口起重機吊裝設備在機構設計中的重點和難點,應用ADAMS軟件對該機構進行優化設計,求出滿足設計要求的最優解,縮短設計周期,提高設計效率,實現了計算機輔助吊裝機構的優化設計,為工程中實際吊裝機構的優化設計提供了較有價值的參考。
關鍵詞:起重機;吊裝機構;優化設計
隨著吊裝行業的不斷發展,固定式港口起重機向大型化、復雜化發展,對設計的方法和手段提出了更高的要求[1,2]。對于固定式起重機吊裝機構的設計,長期以來人們在設計時一直沿襲采用傳統的圖解設計方法,由于圖解法所列方程式高度非線性的,想從中解出待定系數具有很大的困難,從而制約了設計精度和設計效率的提高。更為重要的是,由于圖解法難以把機構綜合與優化設計很好的結合起來,從而也制約了機構設計質量的提高[3,4]。ADAMS軟件是一種造型和分析軟件,它使用交互式圖形環境和零件庫、約束庫、力庫,創建完全參數化的機械系統幾何模型,其求解器采用多剛體系統動力學理論中的拉個朗日方程方法,簡歷系統的動力學方程,對虛擬機械系統進行靜力學、動力學和運動學分析,輸出位移、速度、加速度和反作用力曲線等[5,6]。本文利用ADAMS軟件對固定式港口起重機吊裝機構進行優化設計,得到了比較理想的優化目標。
1吊裝機構運動分析及數學模型
1.1 工作機構運動分析
起重機吊裝設備工作機構采用四連桿組合臂架機構或單臂架式機構,本文選用四連桿組合臂架機構作為設計研究的對象。該機構與單臂架式機構相比最大優點是臂架下的空間較大,因此當起重機的起升高度一定的情況下,起重機的總體尺寸較小。同時貨物懸掛長度也相對減小,擺動現象較輕[7,8]。吊裝機構臂架運動計算簡圖和剛性拉桿運動簡圖如圖1、圖2所示。
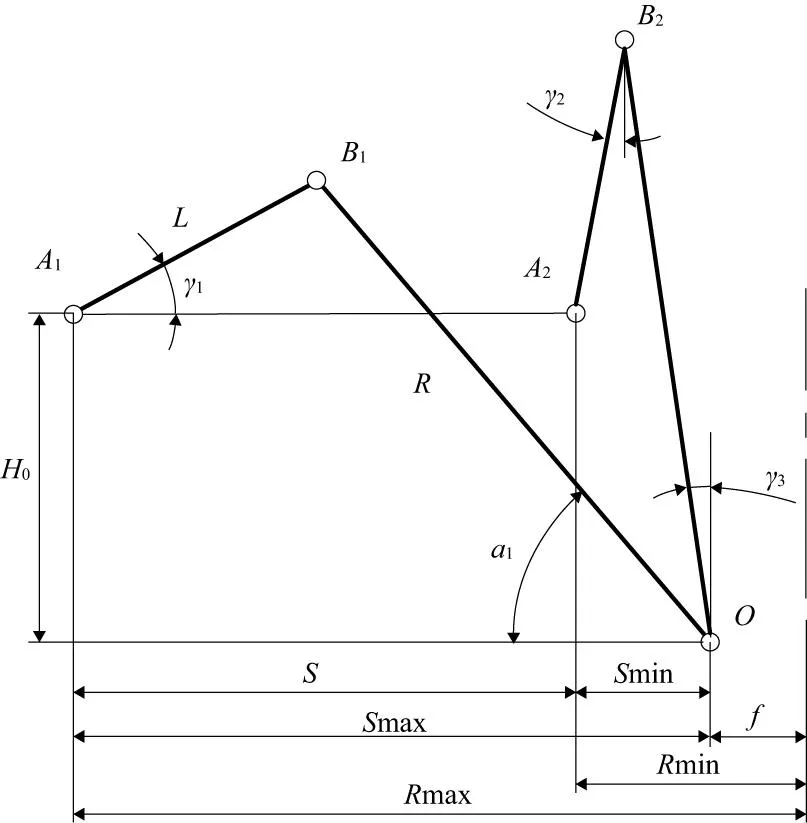
圖1 臂架運動計算簡圖

圖2 剛性拉桿計算簡圖
起重機的基本設計如表1所示。

表1 基本參數表
通過已知參數初步求得機架長度=10.13m,臂架長度=19.91m,象鼻架長度(連桿長度)=4.3m,象鼻架長度(前端長度)=9.82m,剛性拉桿(后搖桿)=17.48m,臂架為驅動件。
1.2 吊裝機構的設計計算
卷繞系統的設計計算,主要包括鋼絲繩、卷筒以及滑輪組等部件。
鋼絲繩的最大靜拉力如下:
(1)
卷筒與滑輪的最低限度直徑如下:
D≥ed
(2)
式中,S為每根鋼絲繩能承受的最大靜載荷拉力;Q為所起升的貨物和吊裝機構的質量;m為滑輪組倍率數;n為繞上卷筒鋼絲繩的根數;ηb為滑輪組效率;η1η2為導向滑輪的效率。
變幅驅動電動機克服的總阻力如下:
U=UO+Ub+Uw+UH+Uc+Ui+Uf
(3)
式中,U0為由于重物和吊裝機構并非沿直線行走以及起升拉力引起的變幅阻力;Ub為由于臂架系統自身不能完全達到平衡狀態而引起的變幅阻力;Uw為由于在正常工作狀態下,風載荷引起的變幅阻力;UH為由于重物在風的作用下擺動引起的載荷所造成的變幅阻力;Uc為由于臂架系統在繞旋轉中心旋轉時產生的離心力引起的變幅阻力;Ui為由于變幅過程中臂架系統在徑向產生的慣性力而引起的變幅阻力;Uf為由于各個機構、零件之間的摩擦阻力引起的變幅阻力[9]。
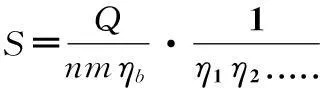
象鼻梁的基本機構簡圖如圖3所示,其相關的計算如下:
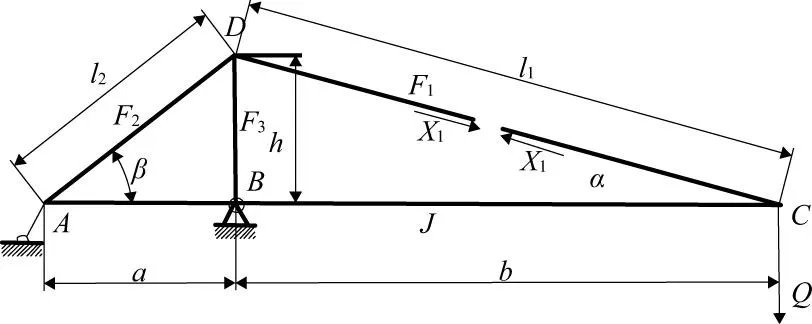
圖3 象鼻梁的基本結構簡圖
切口處相對變位為零可得到力法方程:
δ11X1+Δ1P=0
(4)
當F1=F2=F3=F時,

計算結果如表2所示,

表2 基本參數表
2運用ADAMS軟件進行機構優化
根據設計修正某個設計變量初值,在ADAMS中建立吊裝機構的虛擬樣機模型,并進行約束,如圖4所示。桿1與桿2為鉸連接,桿4與大地為鉸連接,桿2與桿3為轉動副,桿3與桿4為轉動副。
圖4 四連桿機構模型
本文主要對象鼻梁前端的位置、速度、加速度進行測量分析,其結果如圖5和圖6所示。
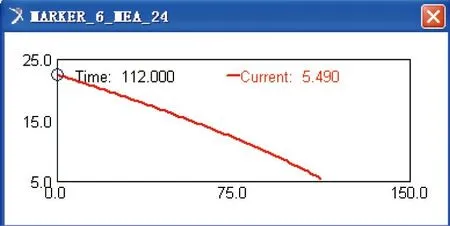
圖5 鼻梁前端x方向的位置變化曲線

圖6 鼻梁前端y方向的位置變化曲線
根據測量得到的數據分析,在x方向上最小極限位置距離為5.49m,滿足設計最小極限位置5.5m。
由圖7可知象鼻梁前端x方向的移動速度在最大極限處時為最小,然后開始逐漸增大,最小極限處時有最大值0.2149m/s。本次設計要求最大行走速度不超過18m/min即0.3m/s。根據實驗結果顯示,能夠滿足設計要求。

圖7 象鼻梁前端x方向的速度變化曲線
由圖8可知象鼻梁前端x方向的加速度在最大極限處最小,在最小極限處達到最大,最大值為0.002981m/s2。
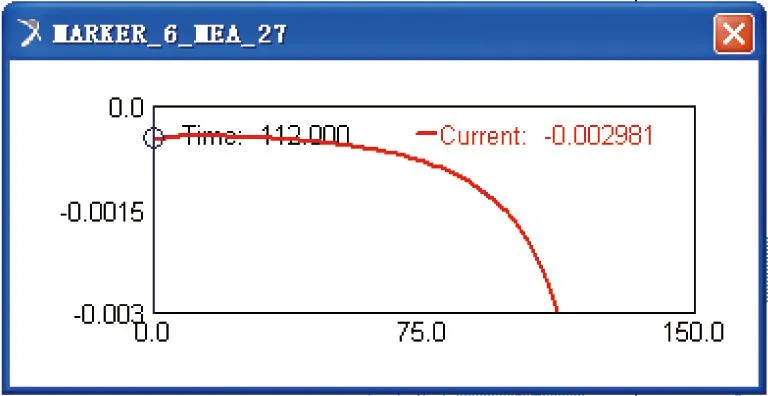
圖8 象鼻梁前端x方向的加速度變化曲線
3結語
1)利用機械系統動力學仿真分析軟件ADAMS將四連桿運動機構的性能分析及參數優化集成起來,實現了產
品的虛擬設計,設計過程中,不僅可以檢驗各機構設計的合理性,而且可以檢測各構件在運動過程中的干涉情況。
2)在對整個機構運動學仿真分析的基礎上,簡歷約束條件并進行優化分析,優化結果滿足設計所提出的要求,實現了預定目標。
3)對四連桿機構的仿真分析表明,虛擬樣機技術能有效地模擬實現環境,其結果形象直觀,仿真效果良好。在此基礎上制造出的樣機,證實了設計的可行性,滿足設計要求,減少物理樣機的試驗次數,大大減少了開發費用及成本,為固定式港口吊裝機構設計提供了一個有效的路徑。
參考文獻:
[1] 肖曉萍,李自勝. 契貝謝夫四連桿機構的優化設計與應用[J]. 機械設計與制造,2011,(9):63-64.
[2] 李新,周志鴻. 基于ADAMS的挖掘機工作裝置優化設計[J]. 設計計算,2012,(3):88-91.
[3] 基于ADAMS軟件的機械壓力機工作機構優化設計[J]. 機械設計,2013,(2):24-27.
[4] 周生保,趙靜一. 基于ADAMS的輕型自卸車液壓舉升機構的優化設計[J]. 機床與液壓,2011,39(24):77-79.
[5] 岳艷琴,舒大文. 基于ADAMS的牛頭刨床優化設計[J].新技術新工藝,2010,(12):55-57.
[6] 陳博翁,關立文. 基于ADAMS的鍛造操作機動力學仿真及優化設計[J]. 機械設計與制造,2009,(3):6-8.
[7] 楊帆,周立志. 一種典型連桿機構的運動學仿真與優化[J]. 南昌工程學院學報,2008,27(6):64-67.
[8] 曹慶良,張鑫. 基于ADAMS的大青椒液壓支架四連桿優化設計[J]. 煤炭科學技術,2009,37(1):36-38.
[9] 張小明,魏德超,郭曉杰. 基于ADAMS的多缸內燃機曲柄連桿機構動力學仿真分析[J]. 機械傳動,2012,36(12):95-97.


Optimization Design for Fixed Type Port Crane Hoisting Equipment Based on ADAMS
LIU Yan, CHEN Xiao, ZHOU Cheng-hua
(Nanjing University of Science and Technology, Taizhou Science and Technology Institute, Taizhou 225300, China)
Abstract:In view of the design key point and difficulty of the fixed type port crane hoisting equipment. its mechanism is optimized by using ADAMS software, in order to obtain its optimum design, shorten the design cycle and improve the design efficiency, and then to realize its optimization design with the and of computer. The valuable reference is given to the practical hoisting mechanism optimization design in engineering.
Keywords:crane; hoisting mechanism; optimization design
收稿日期:2014-11-05
中圖分類號:TH218
文獻標志碼:B
文章編號:1671-5276(2015)02-0039-03
作者簡介:劉艷(1981-),女,江蘇鹽城人,研究方向為機械設計及教學。
猜你喜歡
航空兵器(2016年4期)2016-11-28 21:47:29
科技資訊(2016年19期)2016-11-15 08:34:13
電腦知識與技術(2016年24期)2016-11-14 00:09:15
文理導航(2016年30期)2016-11-12 14:56:57
文藝生活·中旬刊(2016年10期)2016-11-04 06:29:49
中國科技博覽(2016年22期)2016-11-01 14:23:46
中國科技博覽(2016年22期)2016-11-01 13:48:02
中國科技博覽(2016年19期)2016-10-19 12:24:15
中國科技博覽(2016年18期)2016-10-19 08:57:06
科技視界(2016年22期)2016-10-18 15:25:08
