上肢康復(fù)機(jī)器人的設(shè)計研究
2015-01-23 01:08:28蔚國飛董小康費(fèi)秋仙
產(chǎn)業(yè)與科技論壇 2015年19期
□蔚國飛 董小康 費(fèi)秋仙
偏癱病人需要進(jìn)行大量的康復(fù)訓(xùn)練才能恢復(fù)肢體的功能。另外,因為受傷或者隨年齡的增長,人的上肢的能力也有所下降,同樣需要進(jìn)行一定的康復(fù)訓(xùn)練和鍛煉保健。目前,由于醫(yī)院醫(yī)務(wù)人員有限且康復(fù)器材單一,無法滿足需要康復(fù)或鍛煉人群的需求。隨著社會的迅速發(fā)展,機(jī)器人已悄然進(jìn)入人們的生活中,設(shè)計一種上肢康復(fù)機(jī)器人可以有效恢復(fù)偏癱病人的上肢機(jī)能,緩解病痛,同時滿足人們的鍛煉保健功能,具有重要的意義。
一、上肢康復(fù)機(jī)器人的結(jié)構(gòu)設(shè)計
根據(jù)人們康復(fù)訓(xùn)練的需要,設(shè)計的上肢康復(fù)機(jī)器人主要具有肩部的前后擺動、肩部的水平內(nèi)收和外展、手臂的外展和內(nèi)收、肘關(guān)節(jié)的上下擺動和聳肩動作還有腕部的旋轉(zhuǎn)和左右擺動等功能。
(一)手部機(jī)構(gòu)。手部如圖1,通過步進(jìn)電機(jī)驅(qū)動實現(xiàn)腕部的擺動,如圖2 所示,腕部的旋轉(zhuǎn)如圖3,主要靠使用者自己的意愿隨意轉(zhuǎn)動。設(shè)計的腕部設(shè)有環(huán)形限定位置,采用環(huán)形軌道內(nèi)嵌式結(jié)構(gòu),使用者可以隨自己意愿旋轉(zhuǎn)手腕。
(二)大臂和肩部機(jī)構(gòu)。大臂要實現(xiàn)手臂外展和內(nèi)收如圖4,肩部水平內(nèi)收和外展如圖5,通過步進(jìn)電機(jī)驅(qū)動肩部的前后擺動如圖6。大臂通過設(shè)置的調(diào)節(jié)孔來有級調(diào)節(jié)小臂長度,調(diào)后以螺栓固定,并采用雙柱的方式限制X 軸的轉(zhuǎn)動、Y 軸的移動和轉(zhuǎn)動以及Z 軸的移動和轉(zhuǎn)動,該機(jī)構(gòu)具有5 個自由度。
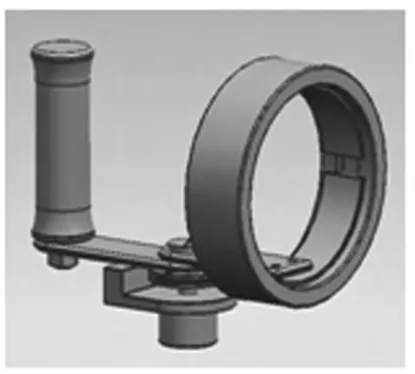
圖1 手部整體建模
圖2 腕部擺動

圖3 腕部旋轉(zhuǎn)
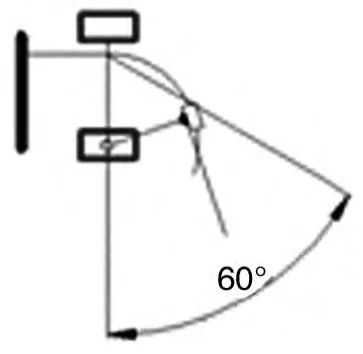
圖4 手臂外展和內(nèi)收圖

圖5 肩部水平內(nèi)收和外展

圖6 肩部的前后擺動
二、上肢康復(fù)機(jī)器人的三維建模及干涉檢驗
(一)機(jī)器人的三維建模。結(jié)合人體工程學(xué)原理和人體結(jié)構(gòu),大臂尺寸范圍定為250 ~350mm,小臂尺寸范圍定為220 ~270mm,可根據(jù)需要有級調(diào)節(jié)。觀察人體的上肢和進(jìn)行一系列的實驗及測量,再根據(jù)傳動部分的設(shè)計計算結(jié)果,應(yīng)用三維軟件UG 對上肢康復(fù)機(jī)器人進(jìn)行建模,如圖7。
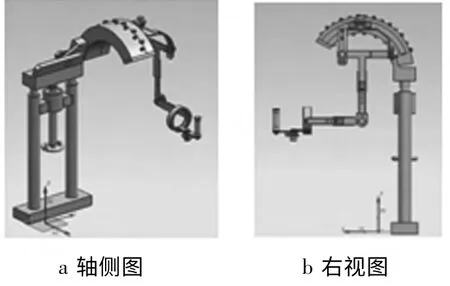
圖7
(二)機(jī)器人的干涉檢驗。為了檢驗所設(shè)計的機(jī)器人尺寸是否有合理,檢驗各構(gòu)件是否能夠按照預(yù)期的設(shè)想運(yùn)動正常工作,且相互之間不發(fā)生干涉,對于建立的樣機(jī)三維模型,進(jìn)行干涉檢查。結(jié)果如圖8 所示。干涉檢查主要是針對支架、連桿等傳動部分以外的構(gòu)件。檢驗結(jié)果顯示所建模型有部分硬干涉,根據(jù)干涉檢查后導(dǎo)出的報告,對硬干涉部分進(jìn)行裝配及零件形狀及尺寸的調(diào)整,修改后的模型消除了硬干涉。

圖8 干涉結(jié)果

圖9 小臂連桿最大變形
三、有限元分析
對應(yīng)用三維軟件UG 建立的零件模型,進(jìn)行網(wǎng)格劃分,并設(shè)置材料特性,約束條件,施加載荷,對主要零件模型進(jìn)行有限元分析。小臂連桿的最大變形為2.321e-003mm,如圖9;大臂連桿的最大變形為0.0306mm,如圖10;軸套的最大變形為3.258e-006mm,如圖11,均滿足變形的剛性要求。

圖10 大臂連桿的最大變形
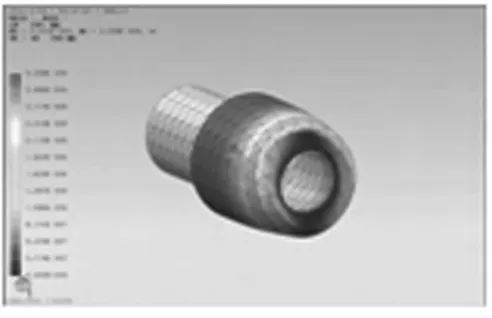
圖11 軸套的最大變形
四、上肢康復(fù)機(jī)器人的控制
采用單片機(jī)技術(shù)對上肢康復(fù)機(jī)器人進(jìn)行控制系統(tǒng)設(shè)計,如圖12 所示。使用者通過PC 機(jī)輸入信息,由單片機(jī)將信號輸入驅(qū)動器再由驅(qū)動器驅(qū)動步進(jìn)電機(jī)工作,從而使康復(fù)機(jī)器人運(yùn)動。機(jī)器人的運(yùn)動軸有角速度傳感器,關(guān)節(jié)處有力傳感器,控制系統(tǒng)通過傳感器返回的信息可以實時檢測、控制各運(yùn)動構(gòu)件的運(yùn)動狀態(tài)。
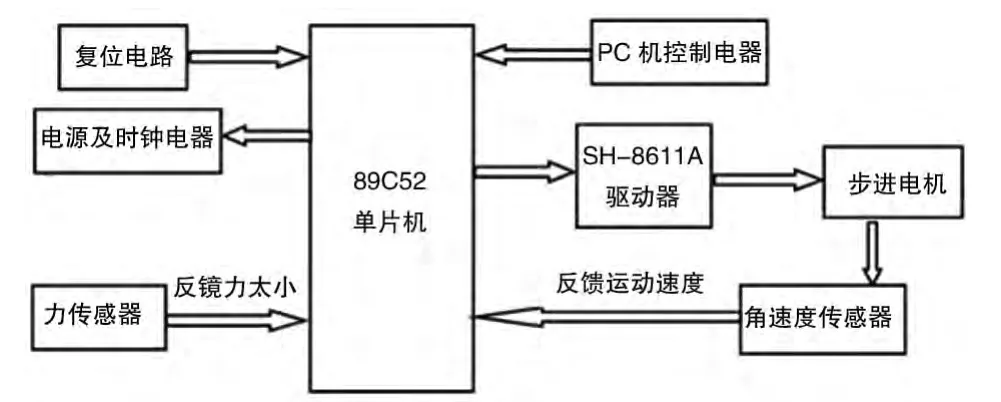
圖12 控制原理圖
[1]李慶玲,孔民秀.5 -DOF 上肢康復(fù)機(jī)械臂交互式康復(fù)訓(xùn)練控制策略[J].機(jī)械工程學(xué)報,2008
猜你喜歡
中華詩詞(2020年1期)2020-09-21 09:24:52
廣東醫(yī)科大學(xué)學(xué)報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
中國衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:33:14
