逆合成孔徑雷達成像距離指標考核?
2015-01-22 10:18:43
雷達科學與技術 2015年3期
關鍵詞:考核
(中國電子科技集團公司第二十研究所,陜西西安710068)
0 引言
ISAR成像是通過發射大帶寬信號實現目標各散射單元在縱向上的高分辨率,同時由于非合作目標相對于雷達的姿態轉動,使目標上各個散射單元的多普勒頻率不同,實現目標各散射單元橫向上的高分辨[1-3]。
由于相控陣天線移相器所提供的相移值不能匹配發射或接收信號頻率變化,因此利用相控陣雷達直接得到高質量的ISAR圖像受到限制,調頻步進逆合成孔徑雷達成像距離計算方法,這部分工作具有開創性,滿足包絡對齊處理所需信噪比的約束時成像距離計算方法和滿足圖像能見度約束時成像距離計算方法[4],從兩條技術途徑或者說兩個不同的側重點,開展了調頻步進雷達成像距離計算方法的研究,完善了ISAR這一部分的研究工作,為雷達參數選擇提供了設計依據,同時提出了圖像質量評價的另外一個技術途徑,用圖像能見度指標衡量成像質量。
目標的成像距離是ISAR的一個重要指標[5]。從常規的雷達距離方程可以知道,雷達的最大作用距離與信號的信噪比相關,但成像雷達的作用距離與成像處理過程中所需的最大信號信噪比有關,或者與目標占據的成像分辨單元的數目、所允許的成像最小能見度、高分辨雷達的目標雷達散射面積(Radar Cross Section,RCS)以及像素的信噪比等有關。
1 成像距離計算
ISAR成像距離計算在工程應用中十分關鍵,是雷達參數設計的基礎。在工作的開展過程中,有關成像雷達的距離計算方面的參考文獻較少,因此,成像雷達距離計算是本文研究的重要方面。
成像雷達的距離計算依然遵從雷達距離方程,但是參數選擇受到成像算法的制約。以下從兩個方面計算成像雷達的作用距離。在成像處理中包絡對齊是最基本的處理環節,直接影響成像質量。通過反復的實踐得到包絡對齊所需的信噪比在10~12 dB時,才能夠進行包絡對齊處理,當然調頻步進逆合成孔徑成像雷達利用步進方式合成高分辨距離像,雷達方程中的信號帶寬遠小于合成后的信號帶寬,在此基礎上可以得到雷達最大成像距離。另外一種方法,是考慮成像像素的可見度,根據雷達方程隨著像素可見度的降低,雷達最大成像距離增加。
1.1 滿足包絡對齊處理所需信噪比約束時成像距離計算
已知雷達距離方程:

取對數以分貝(dB)示為:
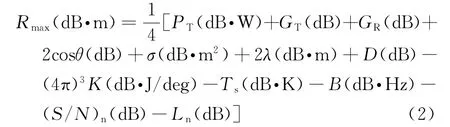
式中,Rmax為雷達最大成像距離;PT為發射機峰值功率,PT=240 W;GT為發射天線增益,GT=34 dB;GR為接收天線增益,GR=35 dB;cosθ為雷達波束掃描角,θ=0°~30°;σ為目標散射面積;λ為雷達工作波長,λ=5.45 cm;D為脈沖壓縮增益;K為玻耳茲曼常數,K=1.38×10-23J/K;Ts為天線等效溫度系數,Ts=290 K;B為接收機中頻帶寬,B=45 M Hz;(S/N)n為包絡對齊處理所需信噪比,(S/N)n=10 dB;Ln為系統損耗,Ln=12 dB。雷達方程中部分參數的取值如表1所示。

表1 雷達方程中部分參數的取值
在高分辨率雷達中,目標的散射面積σ采用參考文獻[1]中的計算方法:

式中,σw為目標寬帶散射面積,σn為目標窄帶散射面積,ms為目標在縱向距離單元分布的距離單元數。對于槳狀飛機來說,σn=10 d Bm2,翼展×機長=24 m×24 m,對于殲七飛機來說,σn=2 dBm2,翼展×機長=15 m×15 m。采用調頻步進方式合成高分辨一維距離像,發射信號瞬時帶寬取40 M Hz,考慮加權等因素,則粗分辨可以達到6 m。假設目標散射點均勻分布時,成像時目標的σn為目標窄帶散射面積,ms的取值如表2所示。

表2 窄帶散射面積和縱向距離單元分布的距離單元數取值
發射脈沖寬度分別選取,合成后帶寬為640 MHz,脈沖壓縮的增益取值如表3所示。
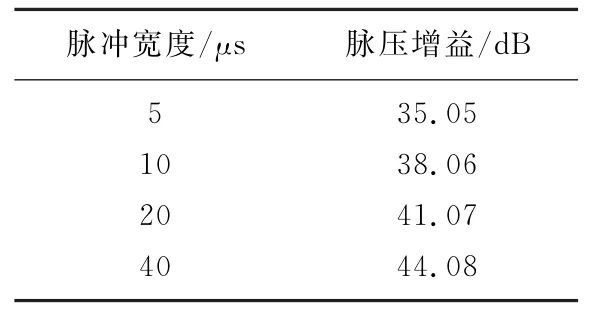
表3 不同時寬脈沖壓縮處理增益
考慮包絡對齊處理所需信噪比的約束(S/N)n=10 dB,發射脈沖寬度分別選取5,10,20和40μs,波束掃描角分別選取0°時,雷達最大成像距離如圖1所示。
用雷達進行目標檢測時,常常采用窄帶的發射波形,因此目標的散射面積是目標上所有散射體的和,而雷達成像時,ISAR能夠把孤立的目標分解到二維距離和多普勒維。因此在成像雷達方程中目標的散射面積應該是目標上單個可分辨空間單元的橫截面積。

圖1 波束掃描角為0°時5種目標的最大成像距離
這樣目標的成像距離與目標的大小、分辨能力的高低相關。例如,如果目標的尺寸小于窄帶雷達的一個分辨單元的尺寸時,成像雷達的分辨能力越高,成像雷達目標散射面積越小,則成像距離越近;目標尺寸越大,成像距離越遠。
1.2 滿足圖像能見度約束時成像距離計算
雷達對目標檢測與雷達對目標成像兩種方式在形式上很類似,但在本質上區別很大,雷達對目標檢測的結果是在虛警概率和檢測概率一定的條件下,有無目標存在;雷達成像不存在有像無像的問題,只是成像質量好壞的問題。距離雷達近的目標成像質量要好,成像目標的圖像包含目標上的高散射系數和低散射系數散射體產生的可視像素,遠一些的目標成像質量差一些,隨著距離的增加低散射系數散射體的回波信號被噪聲淹沒。成像距離與圖像的質量緊密相關。
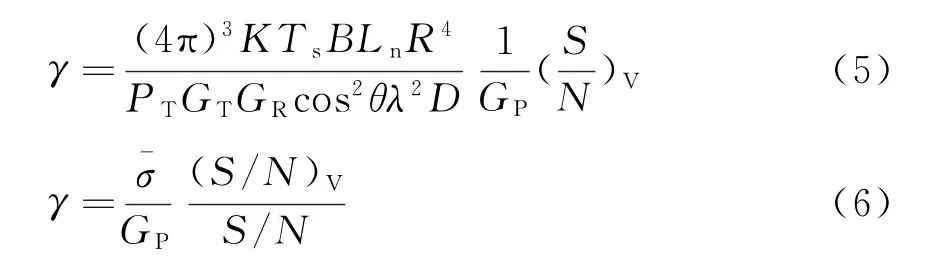
雷達發射窄帶脈沖,在檢測距離為R、信噪比為S/N時目標的平均散射面積為

保持雷達所有參數不變,雷達工作在成像模式下,當雷達工作在寬帶線性調頻方式時,一次脈沖可以得到一個一維高分辨距離像;當雷達工作在調頻步進方式時由N個脈沖得到一個一維高分辨距離像。如果定義GP為雷達在成像模式工作時,多個脈沖積累得到的圖像處理的增益,成像模式工作時由于雷達的高分辨能力,目標被分解,定義被分解的目標散射面積為γ時,在距離為R處,ISAR的圖像中是可視的,對應像素的信噪比為(S/N)V,低于γ的目標在ISAR圖像中是不能夠觀測到的。則
當γ表示了在最大單個脈沖檢測距離上,當信噪比為(S/N)V時目標的橫截面積。當目標散射面積超過γ時,被分解的目標單元在ISAR圖像中可視。最大單個脈沖檢測距離上所觀測到的目標單元的概率如圖2所示。假設目標單元散射面積是瑞利分布的,對于這種分布的單元橫截面積σe,其概率密度表示如下:

單元橫截面積超過γ的概率為

式中,pe表示可視像素占被分解的所有目標單元的比值,是圖像像素能見度的衡量指標,可以用圖像像素的能見度來衡量圖像質量。
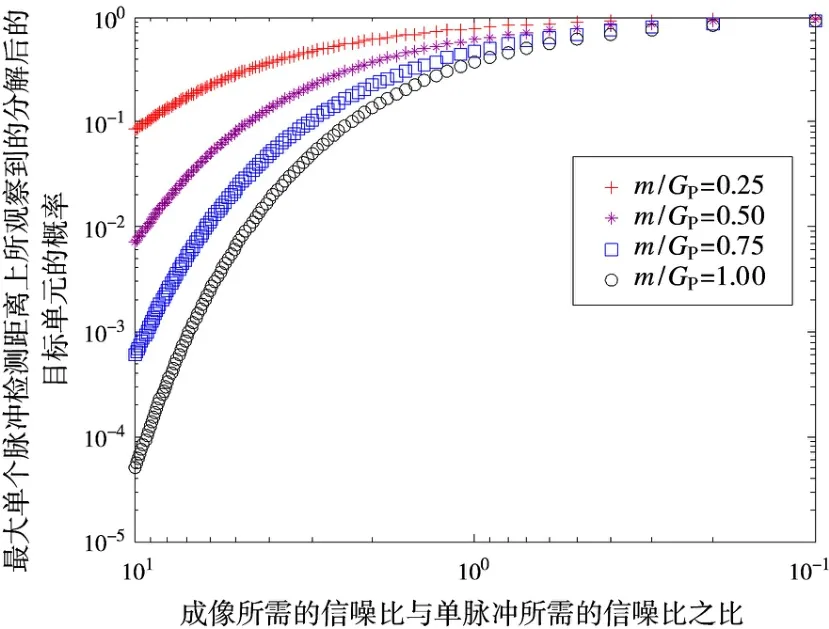
圖2 最大單個脈沖檢測距離上所觀測到的目標單元的概率
由此可以得到自由空間的成像距離:
調頻步進合成后帶寬為640 MHz,考慮加權等因素,分辨率為0.4 m,可以得到典型目標縱向距離單元分布單元數,如表4所示。

表4 縱向距離單元分布的距離單元數取值
從圖3可以看出,5種目標的最大成像距離隨像素可見度增加而降低。計算時波束掃描角為0°,發射信號脈沖為20μs。
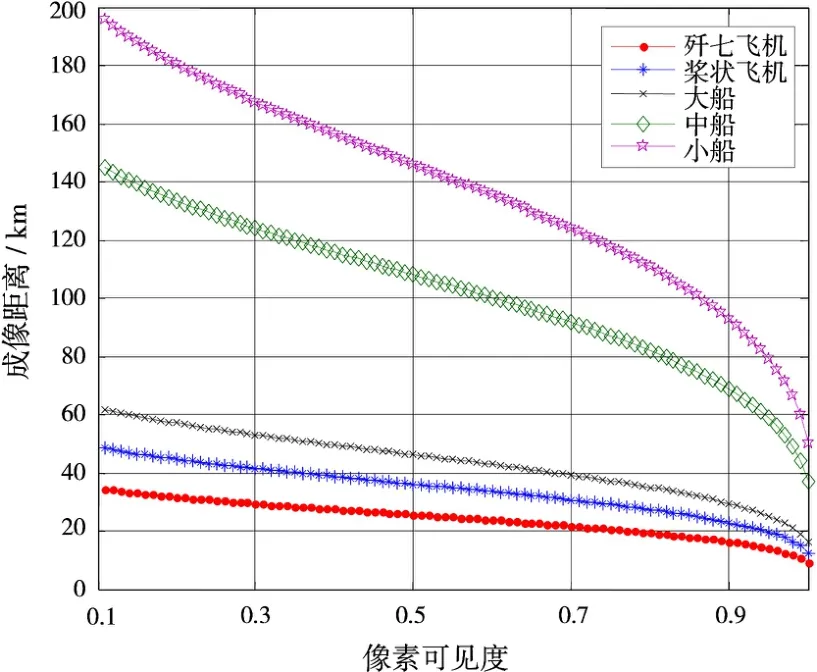
圖3 5種目標的最大成像距離與像素可見度的關系
2 成像作用距離的考核方法
為了驗證成像作用距離,可以采用外場實驗模型和實際合作目標兩種外場考核方法。
2.1 外場實驗模型考核方法
外場實驗模型考核方法是設計一個考核實驗模型,如圖4所示。轉臺上的球反射器根據指標的要求選擇不同大小的雷達橫截面積σ,比如σS=0.001 m2和σL=0.003 m2,轉臺的轉動角速度可以控制。按戰術使用要求選擇雷達陣地,并精確測量其坐標;選擇雷達陣地時避開影響雷達性能的電磁干擾,如高壓線、通信設施等。將轉臺放置在合適的位置保持雷達與轉臺之間通視,控制轉臺轉動,使在成像積累周期內轉動角大于多普勒分辨所需的相干積累角,同時兩個球反射體在橫桿上相距多個距離單元。觀察ISAR成像圖像,可以看出當轉臺位于近距離處兩個球反射器的ISAR像都可以看見,當轉臺位于遠距離處兩個球反射器的ISAR像都看不見了。由于目標的雷達橫截面積一個大一個小,可以找到某距離處,能夠在轉臺轉動一周內均觀察到大目標的ISAR像,小目標在接近雷達轉動半周可見,而遠離雷達半周不能觀察到目標的ISAR像,記錄此刻的距離R。根據雷達方程和雷達系統的設計參數,雷達對艦船目標(例如σ=500 m2),可以計算得到艦船目標的最大成像距離Rmax=aR,其中a=4σ/σL。最大成像距離滿足系統原先設計指標要求時,對雷達的最大成像距離判定合格。

圖4 成像作用距離考核外場實驗示意圖
外場實驗模型考核方法利用標準轉臺模型,可以較為精確地測試成像雷達系統的威力范圍。
2.2 實際合作目標的外場考核方法
實際合作目標的外場考核方法是選擇真實的艦船作為目標,與上述方法一樣,按戰術使用要求選擇雷達陣地,并精確測量其坐標。使目標船按照圖5軌跡在海面上運動,目標船的運動速度保持在時速為20~30 km;令目標船從近處進入到距離雷達RA公里的A點;雷達搜索并發現目標,將目標所在位置置于成像窗口中心;目標船以半圓運動軌跡向距離雷達RB公里的B點運動,可以看出隨著目標船遠離目標圖像的像素點越來越少,圖像質量越來越差。認定一個圖像質量可以接受的狀態,令目標船在此距離處作掉頭動作,即以此距離點為圓心作圓周運動,觀察ISAR圖像質量是否達到要求。如果滿足要求,此距離處就是艦船目標的最大成像距離。如果成像質量不滿足要求,那么令目標船向靠近雷達的方向移動后,再作掉頭運動觀察圖像質量,確定艦船目標的最大成像距離;同理,如果成像質量較好,那么令目標船向遠離雷達的方向移動,作掉頭運動觀察圖像質量,確定艦船目標的最大成像距離。最大成像距離滿足系統原先設計指標要求時,對雷達的最大成像距離判定合格。

圖5 成像作用距離考核中實際合作目標運動軌跡示意圖
實際合作目標的外場考核方法受外界海情和人為因素影響大,在目標船作半圓運動時,海情高時ISAR圖像質量一定比海情低時好;圖像質量的好壞還沒有客觀定量的標準,主觀因素在很大程度上會干擾最大成像距離的認定。
以上兩種方法相比而言,第一種方法比第二種方法測量精確、受海情或主觀影響小、試驗場地易于尋找、標準易于統一、經濟性好。
3 成像作用距離指標考核結果
雷達系統成像作用距離指標考核,按照實際合作目標的外場考核方法考核。在海軍某試驗場申請了兩個航次的試驗,令試驗船從距雷達37.5 km處(B點)的海面,以圖5的軌跡向靠近雷達的方向運動,直到距離雷達7.5 km(A點)時掉頭返回,再駛向B點。在整個考核過程中,均能夠觀測到試驗船的ISAR圖像。
圖6為試驗船在37.5 km處的實時成像結果,中間圖像為試驗船一維距離像,上面圖像為實時二維圖像,下圖為某距離單元瞬時多普勒頻率。

圖6 試驗船在37.5 km處的實時成像結果
4 結束語
考慮在ISAR成像處理中包絡對齊是最基本的處理環節,直接影響成像質量。通過反復的實踐得到包絡對齊所需的信噪比在10~12 dB時,才能夠進行包絡對齊處理,在此基礎上提出了滿足包絡對齊處理所需信噪比的約束時計算最大成像距離和滿足圖像能見度約束時計算成像距離的方法,并計算了所研制雷達系統的多種目標的最大成像距離。
在我國現有的國軍標或行業標準中,ISAR設計指標的考核方法屬于空白。本文對成像指標的考核方法進行了系統的研究,提出了外場條件下利用轉臺模型實現對雷達系統成像能力的驗證方法。此外,還分別提出了成像距離、成像距離分辨率和成像方位分辨率的測試步驟,并給出了所研制ISAR的測試結果。
[1]WEHNER D R.High-Resolution Radar[M].2nd ed.Boston,London:Artech House,1994.
[2]劉永坦.雷達成像技術[M].哈爾濱:哈爾濱工業大學出版社,1999.
[3]保錚,邢孟道,王彤.雷達成像技術[M].北京:電子工業出版社,2005.
[4]張今培.調頻連續波SAR成像算法及參數估計方法研究[D].南京:南京航空航天大學,2012.
[5]薛明華,馬志揚.雷達目標三維成像算法研究[J].雷達科學與技術,2013,11(1):65-70.
XUE Ming-hua,MA Zhi-yang.Research on Three-Dimensional Imaging Algorithm of Radar Target[J].Radar Science and Technology,2013,11(1):65-70.(in Chinese)
猜你喜歡
課堂內外·小學版(智慧數學)(2025年2期)2025-02-28 00:00:00
童話世界(2020年10期)2020-06-15 11:53:22
當代陜西(2019年13期)2019-08-20 03:54:18
當代陜西(2019年12期)2019-07-12 09:12:02
當代陜西(2019年9期)2019-05-20 09:47:40
輔導員(2017年18期)2017-10-16 01:14:51
影劇新作(2017年4期)2017-03-22 05:47:21
中國衛生(2016年9期)2016-11-12 13:27:58
中國衛生(2016年2期)2016-11-12 13:22:24
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44