紅外運動模糊圖像參數估計方法*
2015-01-12 09:04:55白響恩
傳感器與微系統 2015年9期
白響恩, 易 佳
(上海海事大學,上海 201306)
?
紅外運動模糊圖像參數估計方法*
白響恩, 易 佳
(上海海事大學,上海 201306)
在船舶上拍攝紅外傳感圖像的過程中由于船舶的搖晃而導致的運動模糊,會降低圖像的質量。根據運動模糊圖像的特性,分析了運動模糊圖像的退化模型與特性。首先對倒頻譜進行了二值化,并運用Radon變換確定了點擴散函數的模糊角度,然后使用模糊尺度迭代與維納濾波得到復原圖像,再對其進行邊緣檢測,通過計算累計邊緣數確定了模糊尺度。最后對不同模糊程度的圖像計算參數并復原,實驗結果表明了算法的有效性。
運動模糊; 點擴散函數; 倒頻譜; Radon變換; 邊緣檢測
0 引 言
在獲取圖像的過程中,當被拍攝的物體和相機存在相對運動時會造成圖像模糊,這是一種很常見的退化現象。對運動模糊圖像復原技術的研究是圖像復原領域比較熱點的研究課題。船舶在夜間或在惡劣天氣下航行時,用可見光成像觀察障礙物(如冰山)的方式幾乎失效。而紅外成像克服了可見光成像缺點,紅外探測儀可測量目標本身與背景間的溫差,得到不同的熱紅外線形成的紅外圖像。但船舶航行時存在搖晃,紅外相機成像時會產生運動模糊,進而影響圖像的后續處理。相機曝光瞬間船舶的搖晃造成的速度和方向上的變化可近似地認為是恒定的,那么可以等效為勻速直線運動所造成的成像模糊。
模糊圖像復原的關鍵在于點擴散函數(PSF)[2]的準確估計,而點擴散函數由模糊方向和模糊尺度兩個參數確定。
本文首先對紅外圖像的倒頻譜二值化,然后使用Radon變換確定了運動模糊方向角,對尺度迭代的維納濾波復原圖像進行邊緣檢測,通過計算累計邊緣數確定了模糊尺度。最后通過對仿真生成模糊圖像和實拍模糊圖像的PSF參數鑒別及其復原實驗,證明了算法的有效性。
1 圖像退化模型與DSF
1.1 圖像退化模型
圖像退化的模型[3]如圖1所示。

圖1 圖像退化模型
f(x,y)為原始圖像,g(x,y)為退化圖像,H為系統參數亦即PSF,h(x,y),n(x,y)為加性噪聲。它們之間的關系在空間域可用如下數學表達式表示
g(x,y)=H[f(x,y)]+n(x,y) =f(x,y)*h(x,y)+n(x,y),
(1)
式中 *為卷積運算。
圖像復原實際上可以看成是一個預測估計的過程[4],由已經給出的g(x,y)估計出系統參數H,從而近似地恢復出f(x,y)。
1.2 勻速直線運動模糊PSF
當被拍攝物體與相機之間的相對運動方向沿水平直線時,運動模糊的PSF的離散化數學表達式為
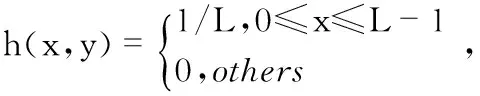
(2)
式中L為圖像上物體移動的像素個數的整數近似值。
若相對運動方向為如圖2所示的任意方向像移,那么假設像移在圖像的x方向和y方向上的像移分別為m和n,則m=Lcosθ,n=Lsinθ。
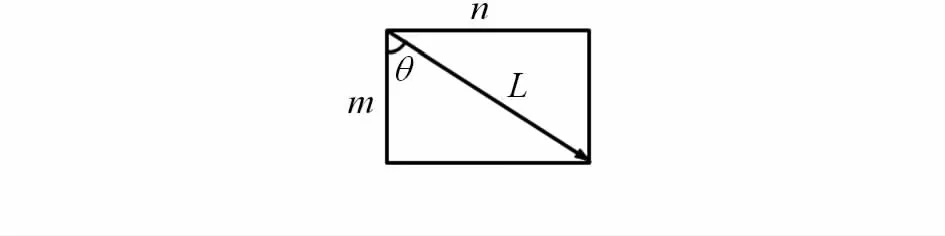
圖2 任意方向像移
當m≥n時,運動模糊的PSF的數學表達式[5]為
(3)
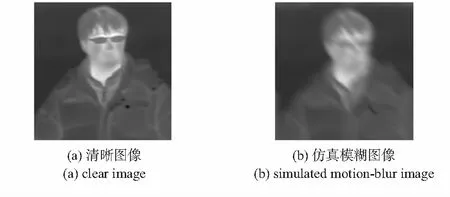
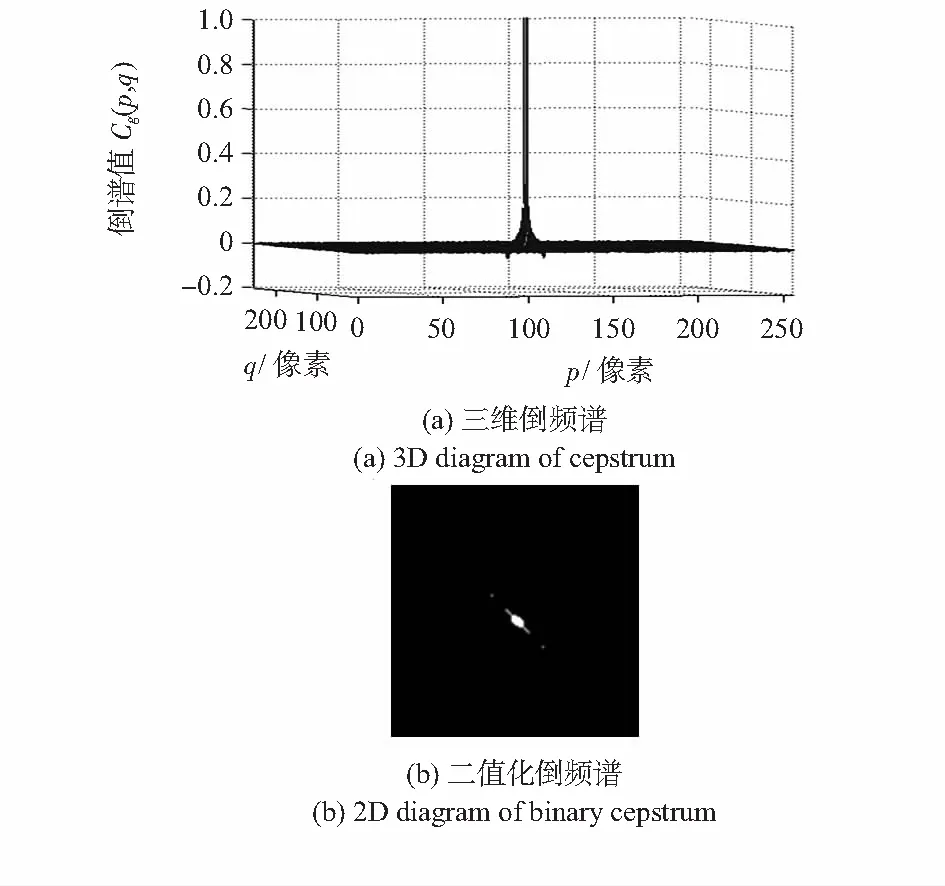
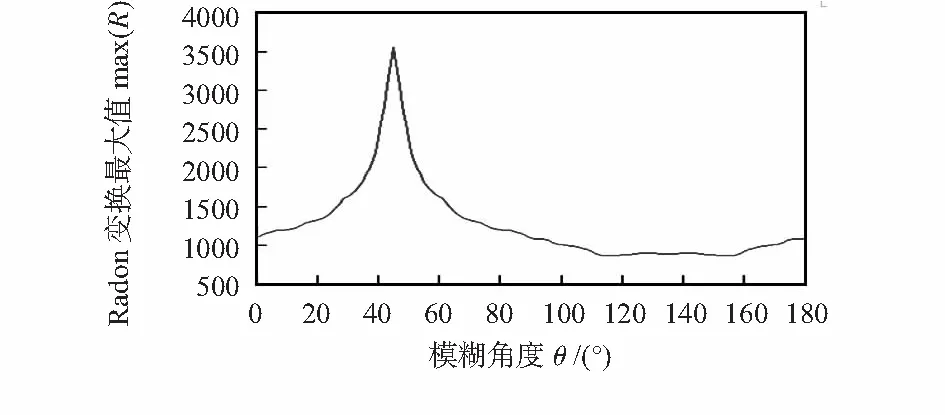
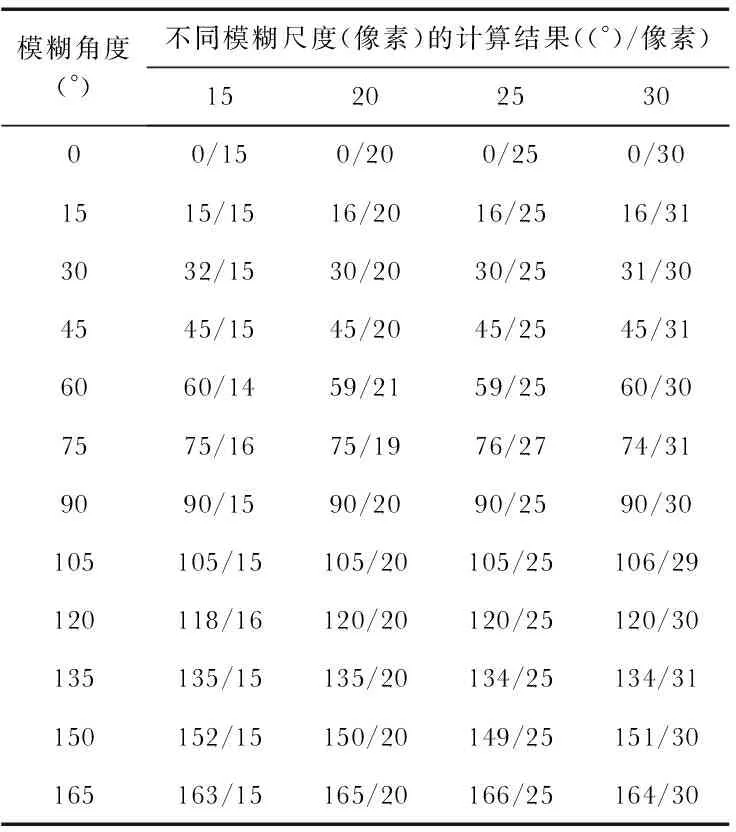
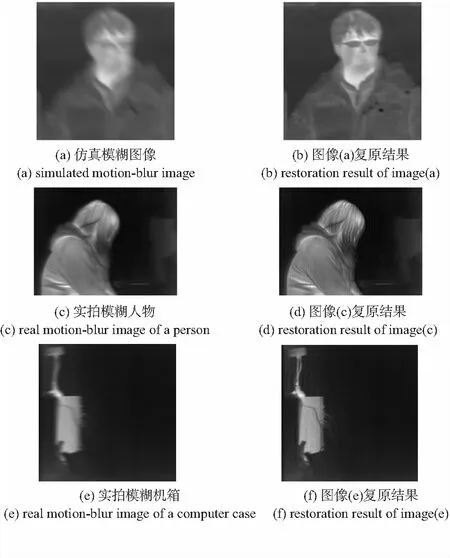
當m (4) 式中 [ ]為取整符號。 2.1 倒頻譜 圖像g(x,y)的倒頻譜定義為 Cg(p,q)=F-1{lg|G(u,v)|}, (5) 式中G(x,y)為g(x,y)的傅里葉變換,F-1表示傅里葉逆變換。 如果忽略噪聲,式(1)中的卷積會在倒頻譜中變成加法 Cg(p,q)=Cf(p,q)+Ch(p,q). (6) 圖3(b)為紅外相機對拍攝的清晰人物圖像圖3(a)作了仿真運動模糊處理,模糊角度θ=45°,模糊尺度L=20。 其倒頻譜的三維圖如圖4(a)所示,它由兩部分組成:高幅值成分反映了原始圖像的特性,低幅值成分反映了模糊系統的特性。為了突出倒頻譜的特征,圖4(b)對圖4(a)進行了二值化,可以看到圖像中心出現了一條亮帶,并且亮帶的方向與模糊方向一致。 圖3 模糊仿真圖像 圖4 倒頻譜三維與二維圖 2.2 模糊方向估計 對圖像作Radon變換,實際上就是將圖像矩陣在某一個指定的角度射線方向上做投影變換。Radon變換的定義有很多種形式,其中一種定義[6]的形式如下 y′cosθ)dy′, (7) 式中 x′與x,y′與y的對應關系為 上式表示了函數f(x,y)在空間(x′,θ)上的投影。 對圖像的二值化倒頻譜做Radon變換確定模糊方向的具體步驟如下: 1)對模糊圖像g(x,y)作傅里葉變換并取對數得到lg|G(u,v)+1|[7],對其進行傅里葉逆變換得到Cg(p,q)。 2)將Cg(p,q)二值化得到B(p,q)。 3)對B(p,q)做1°~180°的Radon變換[8],會得到一個矩陣R。 4)模糊角度θ=arg max(max(R))。 對圖3(b)進行各角度Radon變換求最大值的曲線如圖5所示,曲線中的最大值對應的角度θ=45°。 圖5 各角度Radon變換所對應最大值曲線 2.3 模糊尺度估計 倒頻譜兩個負峰之間的距離是模糊尺度的2倍,但是負峰值點很容易被其他的信息淹沒[9],導致距離沒有辦法被提取出來。因此,本文采用了一種使用維納濾波迭代的方式來確定模糊尺度。假設模糊角度估計的是正確的,當模糊尺度越接近于真實尺度時,復原出的圖像就會越清晰;反之,復原圖像上會出現很強的振鈴現象。對復原圖像進行邊緣檢測之后,這些振鈴就能很明顯地被觀察到。所以,邊緣信息最少時對應的模糊尺度即為要求的值。確定模糊尺度的具體步驟如下: 1)將模糊尺度從L=3開始依次加1迭代,并設置上限Lmax; 4)模糊尺度L=arg min(sum(Bn)),n=3,4,…,Lmax。 對圖3(b)進行模糊長度迭代復原之后,使用以上算法的結果如圖6所示,累計邊緣數曲線中最小值對應的尺度L=20。 實驗中選用了紅外相機拍攝的清晰人物圖像,大小為256像素×256像素。使用了表1中的模糊角度和模糊尺度模擬運動模糊圖像然后對其進行參數的計算,實驗結果如表1所示。 表1 實驗結果 Tab 1 Results of experiments 模糊角度(°)不同模糊尺度(像素)的計算結果((°)/像素)1520253000/150/200/250/301515/1516/2016/2516/313032/1530/2030/2531/304545/1545/2045/2545/316060/1459/2159/2560/307575/1675/1976/2774/319090/1590/2090/2590/30105105/15105/20105/25106/29120118/16120/20120/25120/30135135/15135/20134/25134/31150152/15150/20149/25151/30165163/15165/20166/25164/30 上文估計參數的算法的模糊角度的絕對誤差在2°,模糊尺度的絕對誤差在2之內。圖7(a)為仿真模糊圖像,圖7(b)為參數估計后復原的結果,圖7(c),(e)均為實際拍攝的模糊圖,圖7 (d),(f)分別為它們的復原結果。 圖7 模糊圖像復原結果 運動模糊圖像PSF的參數確定是該類圖像復原中的重要步驟。本文對模糊圖像進行了分析,對二值化倒頻譜運用Radon變換來確定模糊角度,對尺度迭代的維納濾波復原圖像進行邊緣檢測之后確定了模糊尺度,實驗結果表明此算法是有效的。 本文算法對仿真圖像的復原效果很好,但在實際拍攝的圖像中,即使估計的參數很接近真實情況仍會產生比較明顯的振鈴現象。在今后的工作中應該考慮如何去除振鈴現象,進一步提高復原圖像的質量。 [1] 李 仕.航空異速像移實時恢復算法研究與GPU平臺實現[D].長春:中國科學院長春光學精密機械與物理研究所,2010. [2] 王曉紅,趙榮椿.勻速直線運動模糊的PSF之估計[J].計算機應用,2001,21(9):40-41. [3] 岡薩雷斯·伍茲.數字圖像處理[M].3版.北京:電子工業出版社,2011:197. [4] 謝鳳英,趙丹培.Visual C++數字圖像處理[M].北京:電子工業出社,2008:340-341. [5] 王曉紅,趙榮椿.任意方向運動模糊的消除[J].中國圖象圖形學報,2000,5(6):525-529. [6] 孫兆林.Matlab6.x圖像處理[M].北京:清華大學出版社,2002. [7] 郭永彩,郭瑞瑞,高 潮.運動模糊圖像點擴展函數的參數鑒別[J].儀器儀表學報,2010,31(5):1052-1057. [8] 樂 翔,程 建,李 民.一種改進的基于Radon變換的運動模糊圖像參數估計方法[J].紅外與激光工程,2011,40(5):963-969. [9] 郭紅偉,付 波,田益民.實拍運動模糊圖像的退化參數估計與復原[J].激光與紅外,2013,43(5):559-564. Parameter estimation method for infrared motion-blur images* BAI Xiang-en, YI Jia (Shanghai Maritime University,Shanghai 201306,China) Infrared image photographed in the ship with swaying always gets motion-blur,which reduces the quality of the image.Analyze the degradation model of motion-blur image and its properties.Firstly,the cepstrum of degraded image is calculated and transformed to a binary image.Thus Radon transform of the binary cepstrum is used to identify the motion direction of PSF.Secondly,the image is restored by Wiener filtering with iterative blur length.Then edge detection is used to these images and blur length is determined by the cumulative edge count.The result of experiment which covers artificially images and real images shows the proposed algorithm is correct. motion-blur; point spread function(PSF); cepstrum; Radon transform; edge detection 2015—01—12 國家自然科學基金資助項目(61171126);上海重點支撐項目(12250501500);上海海事大學研究生創新基金資助項目(YC2012066);上海海事大學校基金資助項目(20130480) 10.13873/J.1000—9787(2015)09—0027—03 TP 317.4 A 1000—9787(2015)09—0027—03 白響恩(1984-),女,上海人,博士研究生,講師,研究方向為通航安全管理、海上交通風險評估。2 PSF的參數估計
3 實驗結果
4 結束語
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
石家莊鐵路職業技術學院學報(2019年3期)2019-10-30 03:26:32
蘇州科技大學學報(自然科學版)(2017年1期)2017-03-20 15:25:20
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
航天返回與遙感(2014年4期)2014-07-31 17:47:47
長江大學學報(自科版)(2014年7期)2014-03-20 13:21:02