多傳感器數據融合在爬架控制系統中的應用*
2015-12-07 06:54:38陳斌,金堃,李宏
傳感器與微系統 2015年9期
關鍵詞:融合
陳 斌,金 堃,李 宏
(寧波大學信息科學與工程學院,浙江寧波315000)
0 引言
隨著我國經濟的快速發展,高層建筑越來越多。在高層建筑施工過程中,爬架起著越來越重要的作用[1,2]。爬架的控制系統不僅用于控制爬架運行狀態(如啟動、停止)和監測爬架載荷,更需要對爬架可能出現的危險狀況(如超載、失載等)進行報警,從而防止險情的發生。
傳統爬架控制系統一般使用重力傳感器來檢測爬架系統的載荷,當爬架超載或失載時,系統進行警報。但是,爬架運行時,實際情況十分復雜,爬架主體的傾斜或者爬升速度異常都可能出現險情,而傳統爬架控制系統并不能對這些情況進行有效的檢測。通過在系統中增加傾角傳感器和位置傳感器,在測量載荷的同時,也對傾斜角度和爬升速度進行測量,以便從不同的角度對危險情況作出評估。在獲得多傳感器數據的情況下,使用怎樣的預警策略對預警的準確性和爬架系統的可靠性都有著重要的影響。一般的方案是當某一參數超過預警值時,系統發出報警信號,但這種報警策略只反映了爬架的局部特性,并不能準確地反映整個爬架的安全狀態,不能起到很好的預測效果。
針對上述情況,本文提出了一種通過多傳感器數據融合技術提高爬架控制系統安全預警性能的方法,該方法基于BP神經網絡的數據融合[3~6]。它通過將載荷、傾角和速度進行數據融合,使得傳感器之間的信息得以互補,較好地反映爬架的實際運行狀況。通過驗證,該方案明顯提高了預警的準確性,從而提高了系統的可靠性。
1 爬架控制系統結構
爬架控制系統主要由一個主控器和多個分控器組成。分控器作為融合算法的硬件載體,它外接3只傳感器:傾角傳感器、重力傳感器以及位置傳感器,分別測量爬架的傾斜角度、拉力以及高度,其中,高度的變化率即為爬架速度。融合算法的軟件實現是將3只傳感器的數據通過神經網絡進行融合、判斷,從而對險情做出報警。主控器通過CAN總線與多個分控器相連,分控器將融合結果和各傳感器數據通過CAN總線上傳到主控器,主控器將啟動、停止等指令下發給分控器。爬架控制系統的結構圖如圖1所示。
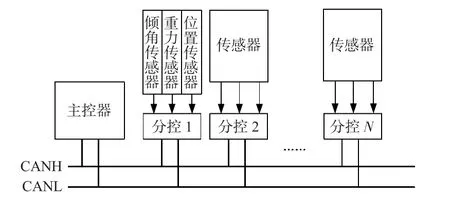
圖1 爬架控制系統結構圖Fig 1 Structure diagram of climbing scaffold control system
2 基于BP神經網絡的數據融合算法
2.1 數據的融合技術
數據融合是一個多級、多層面的數據處理過程,主要完成對來自多個信息源的數據進行自動檢測、關聯、估計及組合等的處理[7,8]。根據數據處理的分辨率可以將數據融合的結構分為像素級融合、特征級融合、決策級融合。根據爬架系統的要求,采用基于BP神經網絡的數據融合算法,這是一種特征級融合。
2.2 BP神經網絡
BP算法是一種用來訓練非線性網絡的隨機最快下降法,網絡訓練包括前向計算和反向傳播兩個過程,通過敏感性的反向傳播來調整網絡參數,直到誤差滿足要求為止。敏感性的反向傳播公式為[9]

權值和偏置值更新的公式為

其中,sn為敏感度矩陣;bn為偏置值矩陣;pn為未通過傳輸函數的輸出向量;α為學習速度;on為通過了傳輸函數的輸出向量;t為期望的網絡最終輸出矩陣;Wn為權值矩陣;y為實際的網絡最終輸出陣;Fn(pn)=)為傳輸函數的導數。
通過不斷地對比與調整,本文選擇了由4變量輸入層、1層隱含層和1變量輸出層構成的BP網絡,網絡結構如圖2所示。
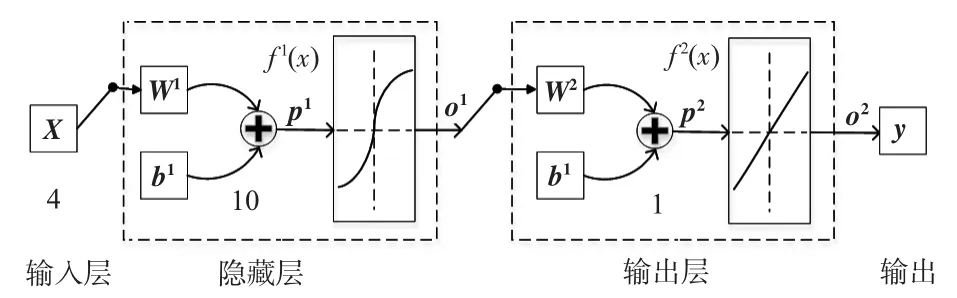
圖2 BP神經網絡結構圖Fig 2 Structure diagram of BP neural network
借助Matlab神經網絡工具箱對樣本進行訓練,可以得到網絡的權值和偏置值。
2.3 訓練樣本的選擇
樣本的選取對網絡性能的影響十分關鍵,在選取樣本時,既要考慮到正常情況下的樣本,也要考慮到各種各樣的故障樣本。爬架在運行過程中,可能會出現的情況可分為以下幾類:正常運行、速度異常、載荷異常、電機故障以及爬架傾斜等。針對這些,采集了一系列訓練樣本,由于樣本間的數據差異較大,需要對其進行歸一化處理,這里采用min-max標準化的歸一化方法,轉換函數如下

其中,x*是歸一化后的樣本值,x是歸一化前的樣本值,max,min分別為樣本的最大和最小值。
本設計的部分樣本數據和歸一化之后的數據如表1所示。
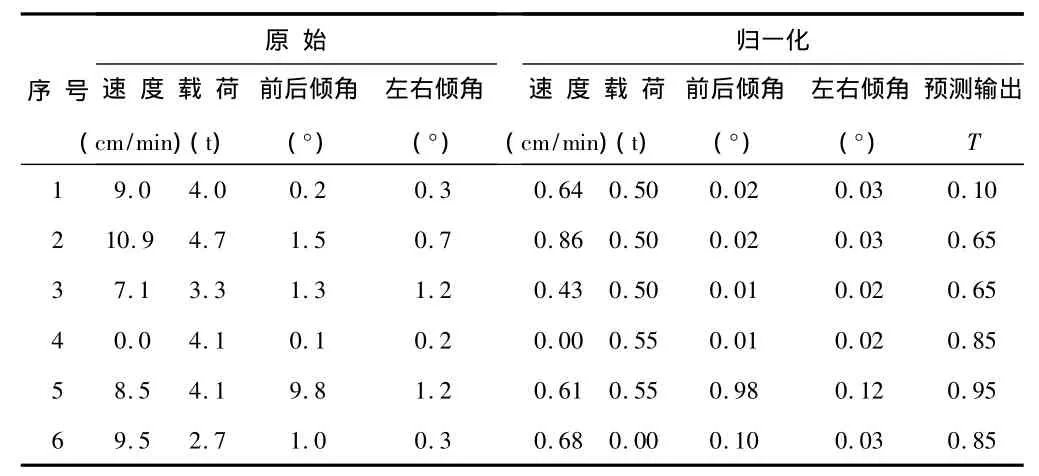
表1 部分樣本數據表Tab 1 Table of part of sample data
其中,序號1為正常運行的樣本;2,3是速度異常的樣本;4是電機故障的樣本;5是爬架傾斜的樣本;6是載荷異常的樣本。預測輸出T小于0.60時,系統判定為安全;大于0.60且小于0.85時,判定為警告;大于0.85時,判定為危險。
2.4 網絡參數的確定
建立BP神經網絡最重要的是網絡權值與偏置的確定。通過訓練對隱含層神經元的個數和傳輸函數進行調整,使得網絡的運行效率和融合結果都比較合適。最終的網絡結構是:隱含層包含10個神經元,作用函數為tansig函數,輸出層作用函數是purelin函數。BP神經網絡的訓練過程在Matlab中實現[10],訓練結束后,可得到網絡的權值與偏置值。網絡訓練過程的誤差變化如圖3所示,均方差在第137步達到0.0052665。
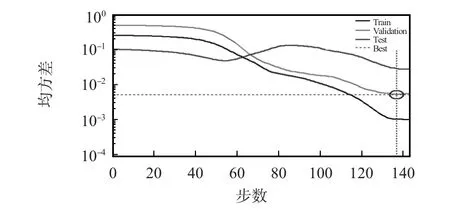
圖3 BP神經網絡訓練過程誤差曲線Fig 3 Error curve of BP neural network training process
3 融合算法的實現
3.1 分控器硬件結構
作為融合算法的硬件載體,分控器的硬件主要由數據采集部分、數據融合部分、數據傳輸部分組成,除此之外,還有電源部分、顯示部分,以及電氣控制部分,結構框圖如圖4所示。
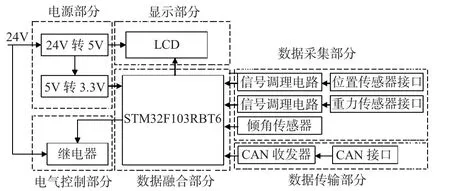
圖4 分控器結構框圖Fig 4 Structure block diagram of sub controller
數據采集部分包括傳感器接口和信號調理電路。數據融合部分是通過單片機實現融合算法。所有數據都在CAN總線上傳輸。
3.2 分控器軟件設計
分控器的軟件結構也可分為數據采集部分、數據融合部分、數據傳輸部分、顯示部分以及控制部分,分控器軟件的流程圖如圖5所示。
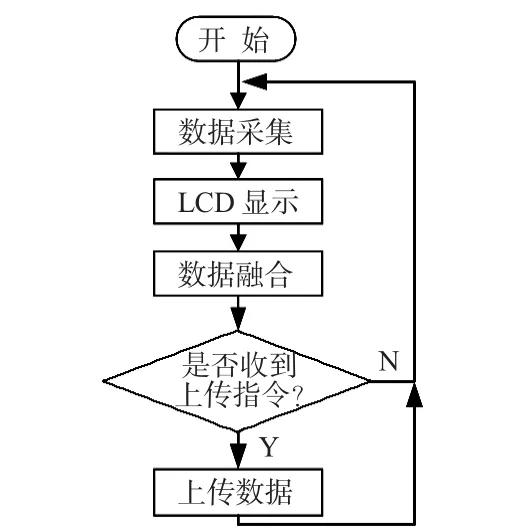
圖5 分控器軟件流程圖Fig 5 Flow chart of sub controller software
其中,數據融合部分是核心,完成的是矩陣的運算,計算公式為:y=f2(W2f2(W1X+b1)+b2),其中,W1,W2,b2,b1是通過訓練得到的網絡參數,在軟件中可用常數數組實現。f1,f2是網絡的傳輸函數,由于控制器對數學函數的計算速度比較慢,可以采用查表的方式實現,可提高計算速度,具體流程如圖6所示。
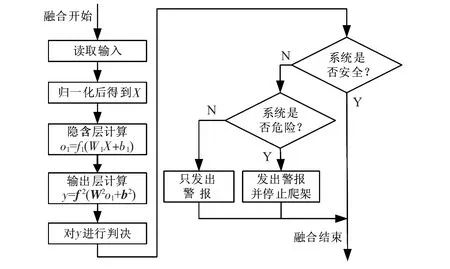
圖6 數據融合流程圖Fig 6 Flow chart of data fusion
4 系統測試
由于現場測試十分困難,本文模擬了幾種爬架運行過程中實際可能會出現的情況,并測得幾組測試數據。將測試數據分別輸入到分控器和Matlab中構建的神經網絡,得到2組融合結果。
為了和傳統的爬架控制系統對比,對傳統的爬架控制系統也進行了測試,該控制系統的判決函數如下
最后的測試結果如表2所示。
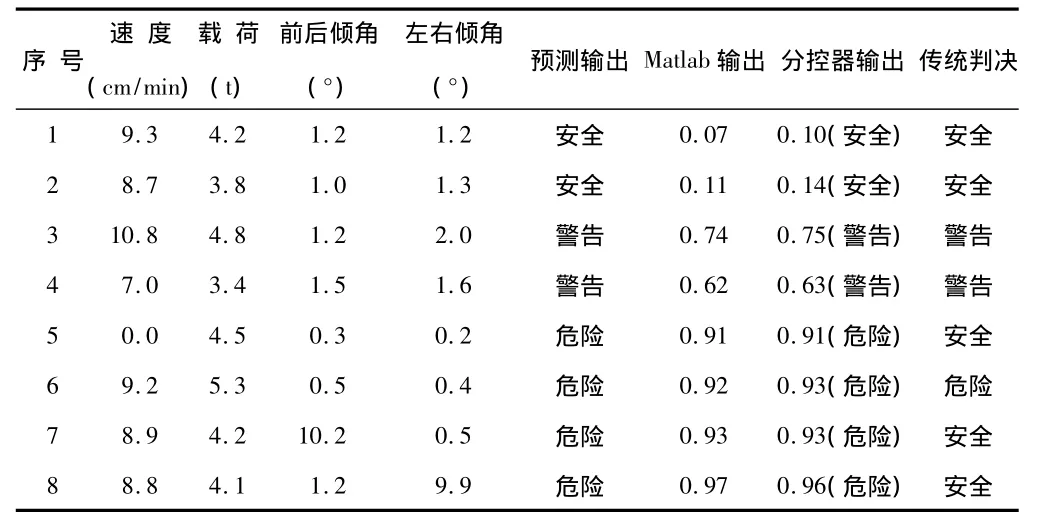
表2 測試數據表Tab 2 Table of test data
由表2可知,Matlab輸出的結果與分控器的輸出結果十分接近。這說明在Matlab中構建的神經網絡應用在分控器上效果良好,分控器的輸出通過式2~6判決后,與預測輸出完全一致,而傳統爬架控制系統的判決結果中,第5,7,8三組漏報了險情。因此,基于融合算法的系統具有很好的報警準確性。
5 結束語
本文就傳統的爬架控制系統安全評估角度單一,報警準確率低的缺陷,提出在增加角度傳感器和拉線傳感器的基礎上,通過對BP神經網絡學習過程的研究和對分控器硬件平臺的搭建及軟件結構的分析,將基于BP神經網絡的數據融合算法應用在爬架控制系統中。測試結果表明:該融合算法不僅能多角度評估系統的安全性,而且可以明顯地提高預警準確性和系統的可靠性。
[1]強阿梅.導軌式爬架在高層建筑中的應用[J].山西建筑,2002,28(2):69-70.
[2]宋 健.爬架在高層建筑施工中的應用研究[J].黑龍江科技信息,2013(8):277.
[3]Kokar M,Kim K.Review of multisensor data fusion architectures and techniques[C]∥Proceedings of 1993 IEEE International Symposium on Intelligent Control,IEEE,1993:261-266.
[4]Luo R C,Yih C C,Su K L.Multisensor fusion and integration:Approaches,applications,and future research directions[J].Sensors Journal,IEEE,2002,2(2):107-119.
[5]程利民,孔 力,李新德.信息融合方法及應用研究[J].傳感器與微系統,2007,26(3):4-9.
[6]黃漫國,樊尚春,鄭德智,等.多傳感器數據融合技術研究進展[J].傳感器與微系統,2010,29(3):5-12.
[7]康耀紅.數據融合理論及應用[M].2版.西安:西安電子科技大學出版社,2006.
[8]Lawrence A Klein.多傳感器數據融合理論及應用[M].戴亞平,譯.北京:北京理工大學出版社,2004:37-57.
[9]Martin T Hagan.神經網絡設計[M].戴 葵,譯.北京:機械工業出版社,2002:197-221.
[10]張德豐.Matlab神經網絡應用設計[M].北京:機械工業出版社,2009:92-119.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38