小車吊重系統動力學模型與仿真
2015-01-08 03:30:56王銀安
科技視界 2015年11期
王銀安
(上海海事大學物流工程學院,中國上海201306)
0 引言
橋式起重機廣泛應用于碼頭、電廠等各個領域,是一種重要的裝卸作業機械。然而起重機在作業過程中會受到風 力、摩擦力等外界因素以及小車加減速的影響,會引起的吊重的擺動。吊重防搖控制系統是現代起重機的重要組成部分。一個好的防搖控制系統對提高工作生產效率和減少安全生產隱患具有重大意義[2]。
起重機在工作時,電機牽引小車在橋架軌道上運動,小車和吊重之間通過柔性鋼絲繩進行連接,并隨小車的運動而運動,可類似看作單擺運動。由于單擺運動本身就是一個非線性系統,再加上固定點不斷的加減速,這就使系統變得更加復雜,難以獲得精確的數學模型。本文以實用性和準確性為出發點,并根據起重機的結構特點,通過分析力學中的拉格朗日方程來建立小車-吊重系統的簡化動力學模型,該模型能很好的反應小車-吊重系統的動力學特征,同時該模型易于分析及計算機仿真,便于工程應用。
1 小車-吊重系統簡化模型建立
1.1 幾何模型與簡化
實際起重機模型系統比較復雜,為了分析其運動特性,可以對其作如下假設和簡化處理:只考慮小車吊重的橫向擺動且擺角較小;鋼絲繩的質量以及長度變化可以忽略不計;不計空氣阻力、風力以及小車和軌道之間的摩擦力[3]。
圖1為簡化的小車吊重系統幾何模型,小車質量為M,吊重質量為m,小車和吊重的坐標分別為(xM,yM)和(xm,ym),l為鋼絲繩長,以力F方向為x軸正向,垂直地面向下為y軸正向,建立直角坐標系,擺角為系統的廣義坐標。
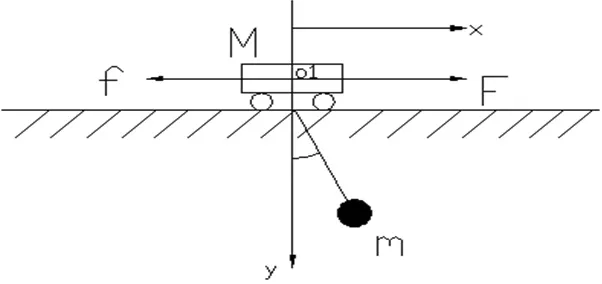
圖1 小車-吊重系統幾何模型
1.2 基于拉格朗日的動力學建模
拉格朗日方程[1]是從能量的觀點建立起來的運動方程,在建立系統運動方程時,只需分析系統的動能和廣義力,因此可以大大簡化建模過程。拉格朗日方程為:

其中,L為拉格朗日算子,T為系統的動能函數,V為系統的勢能函數,qi為系統廣義變量,fi為系統廣義外力。
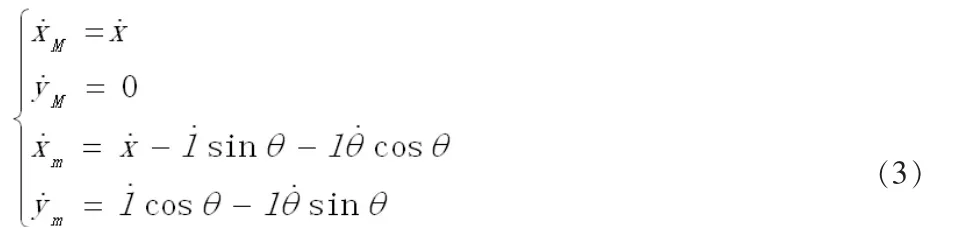
如圖1,小車和吊重的水平和垂直位移分量表示為:

小車和吊重的速度分量為:
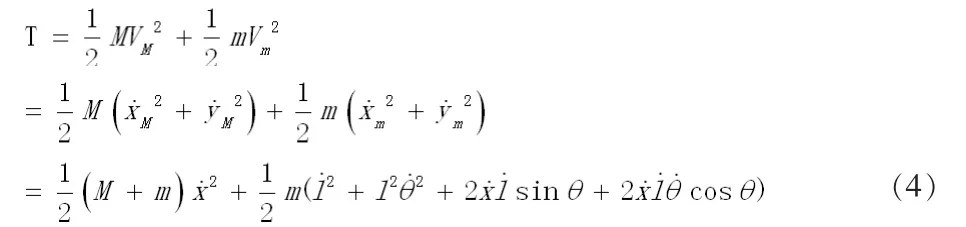
系統的動能為:
設初始位置繩長為h,則系統的勢能為:

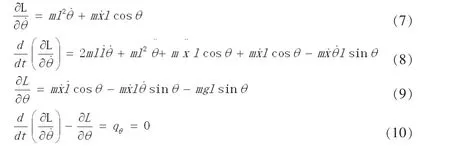
系統的拉格朗日算子為:

在q(t)=0(t)廣義坐標下,由于不計空氣阻力和風力,并且忽略鋼絲繩與小車連接處的摩擦力,故Fθ=0。于是:精簡化,系統的拉格朗日方程為:

1.3 操作點附近的線性方程
考慮到實際情況,在小車水平運動過程中,可以忽略垂直方向的繩長變化,即假定;在操作點 θ=0 附近,θ 只有很小的變化,可以假定 sinθ=θ,cosθ=1。 故式(11)的非線性方程可簡化為:

2 小車-吊重系統動態仿真
2.1 伺服電機的啟動特性
本文伺服系統通過位置指令對電機進行控制,該指令設定電機啟動由零轉速達到設定轉速為直線加減速的方式。伺服驅動器的時間常數設定為3ms,伺服電機的啟動特性[4]如下圖2所示:
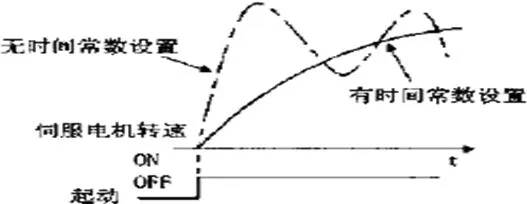
圖2 伺服電機啟動特性
鑒于伺服電機的快速響應特性,我們可以把電機的啟動過程看作理想系統,把伺服電機看作慣性環節,其傳遞函數為:

2.2 仿真方法和仿真結果
本文采用MATLAB中的Simulink模塊進行建模[5],實現動態系統的仿真與分析。動態仿真的目的是分析小車加速度和吊重繩長對擺角的影響規律,因此分別按不同的小車速度和繩長組合起來進行小車-吊重系統的動態仿真。
1)繩長對吊重擺角的影響。在給定速度V=0.2m/s情況下,設吊重繩長分別為 L=0.2m,0.3m,0.4m,進行動態仿真。 根據仿真結果繪制的吊重擺角曲線如圖3所示:
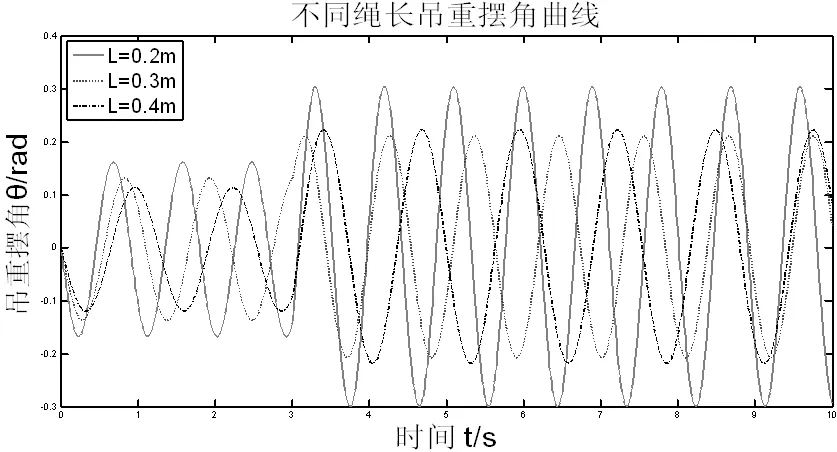
圖3 繩長與吊重擺角的關系
由圖3知:當電機啟動時,小車處于加速狀態,吊重擺動滯后,具有較大的負擺角,當給定速度信號降為零時,小車處于減速狀態,吊重以較大的擺角向前運動。當小車勻速運動或運動后處于靜止狀態時,小車作自由振動。吊重擺角的大小受繩長的影響相對較小,而吊重擺陣的頻率隨繩長L的增加而減小。
2)小車設定速度對吊重擺角的影響。由伺服電機的啟動特性知,小車設定速度越大,電機啟動時小車加速度越大。給定繩長L=0.4m,設小車設定速度分別為 0.1m/s,0.2m/s,0.3m/s,進行動態仿真。 吊重擺陣角度曲線如圖4所示:
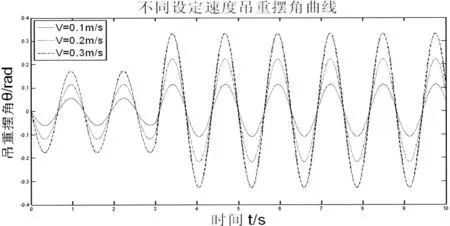
圖4 小車設定速度與擺角關系曲線
由仿真結果知:吊重擺動角度大小受小車加速度影響較大,并隨小車加速度的增加而增大,而吊重擺動頻率受小車加速度的影響相對較小。
3 結論
建立小車-吊重系統的動力學模型對吊重防搖擺控制方法的研究具有重大的意義。本文通過對小車-吊重系統動力學模型進行計算機動態仿真,研究吊重繩長、小車加(減)速度和吊重擺動角度的關系,根據仿真結果,在防搖擺控制研究中應著重考慮小車加(減)速度和吊重繩長兩個方面對吊重擺動角度的影響。
[1]Sirri Sunay Gurleyuk,Ozgur Bahadir,Yunus Turkkan.Improved Three-Step Input Shaping Control of Crane System[J].ISSN Issue 6,Volume 7,June 2008.
[2]吳宏智.集裝箱裝卸搬運機械發展概況[J].物流技術,1994(5).
[3]李偉.起重機載荷擺陣模型的簡化條件及誤差[J].山東建筑工程學院學報,1998,13(1).
[4]田景良.橋式起重機構造與檢修[M].北京:化學工業出版社,2008:78-89.
[5]王正林,王勝開,陳國順.MATLAB/Simulink 與控制系統仿真[M].北京:電子工業出版社,2005.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
