渦扇發(fā)動(dòng)機(jī)性能退化緩解控制與推力設(shè)定
2015-01-03 08:14:13李睿超郭迎清
航空發(fā)動(dòng)機(jī) 2015年2期
關(guān)鍵詞:指令發(fā)動(dòng)機(jī)
李睿超,郭迎清
(西北工業(yè)大學(xué)動(dòng)力與能源學(xué)院,西安710072)
渦扇發(fā)動(dòng)機(jī)性能退化緩解控制與推力設(shè)定
李睿超,郭迎清
(西北工業(yè)大學(xué)動(dòng)力與能源學(xué)院,西安710072)
為了補(bǔ)償性能退化發(fā)動(dòng)機(jī)的推力損失,減輕飛行員工作負(fù)擔(dān),提高推進(jìn)系統(tǒng)的自動(dòng)化程度,開展了渦扇發(fā)動(dòng)機(jī)性能退化緩解控制(EPD M C)研究。針對(duì)某型渦扇發(fā)動(dòng)機(jī)部件級(jí)模型設(shè)計(jì)了具備穩(wěn)態(tài)控制、加/減速過(guò)渡態(tài)控制和極限保護(hù)等功能的基準(zhǔn)控制器;在此基礎(chǔ)上設(shè)計(jì)了外環(huán)推力控制回路,給出1種在多參數(shù)約束下的推力設(shè)定方法,并設(shè)計(jì)了合理的切換邏輯確保內(nèi)外環(huán)控制器能協(xié)調(diào)工作。M A TLA B/Simulink下的仿真結(jié)果表明:該智能改進(jìn)控制系統(tǒng)架構(gòu)可以在保證發(fā)動(dòng)機(jī)安全工作的前提下,通過(guò)合理地設(shè)定期望推力,最大程度地補(bǔ)償推力損失,維持油門桿角度和推力的對(duì)應(yīng)關(guān)系近似不變。
緩解控制;性能退化;智能改進(jìn)控制;推力設(shè)定;渦扇發(fā)動(dòng)機(jī)
0 引言
隨著服役時(shí)間的增加,航空發(fā)動(dòng)機(jī)的性能將不可避免地發(fā)生退化,主要反映在推力的減小和耗油率的增加上。在發(fā)動(dòng)機(jī)性能衰退的過(guò)程中,氣路部件的氣流流通能力和工作效率會(huì)逐漸下降,造成油門桿角度(PLA)與推力的對(duì)應(yīng)關(guān)系發(fā)生變化并帶來(lái)排氣溫度升高、渦輪工作環(huán)境惡化等一系列不利影響。傳統(tǒng)的發(fā)動(dòng)機(jī)控制系統(tǒng)通過(guò)控制轉(zhuǎn)速或壓比間接地控制發(fā)動(dòng)機(jī)的推力和失速裕度,然而由于制造公差和使用退化等原因,控制系統(tǒng)通常需要犧牲部分性能以確保發(fā)動(dòng)機(jī)在上千個(gè)飛行周期內(nèi)具有足夠的穩(wěn)定裕度,如能對(duì)推力進(jìn)行直接控制[1-2]可進(jìn)一步提高發(fā)動(dòng)機(jī)的整體性能,但為此需要重新設(shè)計(jì)控制系統(tǒng)并對(duì)控制邏輯做出復(fù)雜而嚴(yán)密的論證。
針對(duì)上述問(wèn)題,國(guó)外提出1種基于傳統(tǒng)控制系統(tǒng)的智能改進(jìn)控制架構(gòu)(Intelligent Retrofit Control Architecture)[3-6],即發(fā)動(dòng)機(jī)性能退化緩解控制(EPDM)技術(shù)。該改進(jìn)控制架構(gòu)在原控制系統(tǒng)的基礎(chǔ)上添加了由推力設(shè)定邏輯、推力估值器及轉(zhuǎn)速指令修正器構(gòu)成的外環(huán)推力控制回路,根據(jù)發(fā)動(dòng)機(jī)的退化程度通過(guò)調(diào)整轉(zhuǎn)速基準(zhǔn)信號(hào),維持PLA與推力的對(duì)應(yīng)關(guān)系近似不變。該架構(gòu)在現(xiàn)有控制系統(tǒng)的基礎(chǔ)上直接進(jìn)行改進(jìn),具有縮短開發(fā)周期,避免大量修改現(xiàn)有控制系統(tǒng)的優(yōu)點(diǎn)。李業(yè)波[7]等在雙軸混排渦扇發(fā)動(dòng)機(jī)上對(duì)EPDMC的可行性進(jìn)行了仿真試驗(yàn)并取得了一定成果。在智能改進(jìn)控制架構(gòu)中,合理地設(shè)定期望推力以確保發(fā)動(dòng)機(jī)安全穩(wěn)定工作是補(bǔ)償推力損失的必要前提,但以上文獻(xiàn)均未對(duì)推力設(shè)定邏輯進(jìn)行詳細(xì)論述。
本文針對(duì)某型國(guó)產(chǎn)軍用雙軸渦扇發(fā)動(dòng)機(jī)[8]設(shè)計(jì)具備穩(wěn)態(tài)控制、加/減速控制及參數(shù)極限保護(hù)功能的發(fā)動(dòng)機(jī)基準(zhǔn)控制系統(tǒng);并以此為基礎(chǔ)搭建外環(huán)推力控制回路,對(duì)EPDMC涉及的推力設(shè)定、轉(zhuǎn)速指令修正等關(guān)鍵技術(shù)進(jìn)行研究;最后對(duì)系統(tǒng)進(jìn)行仿真驗(yàn)證。
1 基準(zhǔn)控制系統(tǒng)設(shè)計(jì)
1.1 發(fā)動(dòng)機(jī)控制系統(tǒng)的控制邏輯和結(jié)構(gòu)
現(xiàn)代航空發(fā)動(dòng)機(jī)控制計(jì)劃十分復(fù)雜,渦扇發(fā)動(dòng)機(jī)慢車以上狀態(tài)的控制邏輯主要包含3個(gè)方面:(1)穩(wěn)態(tài)控制:當(dāng)發(fā)動(dòng)機(jī)受到擾動(dòng)時(shí),保證發(fā)動(dòng)機(jī)在既定的工作點(diǎn)工作。(2)過(guò)渡態(tài)控制:在安全可靠的前提下,保證發(fā)動(dòng)機(jī)由1種工作狀態(tài)快速平穩(wěn)地切換到另1種工作狀態(tài)。(3)極限保護(hù)控制:對(duì)各項(xiàng)參數(shù)加以限制,避免發(fā)動(dòng)機(jī)進(jìn)入失速、喘振、超溫、熄火等不安全的工作狀態(tài)中。
1種典型的渦扇發(fā)動(dòng)機(jī)控制邏輯[6-9]如圖1所示。主穩(wěn)態(tài)控制器與加/減速控制計(jì)劃的工作邏輯為:將主穩(wěn)態(tài)控制器的輸出與加/減速控制計(jì)劃的輸出進(jìn)行比較并通過(guò)低/高選得到燃油流量指令。
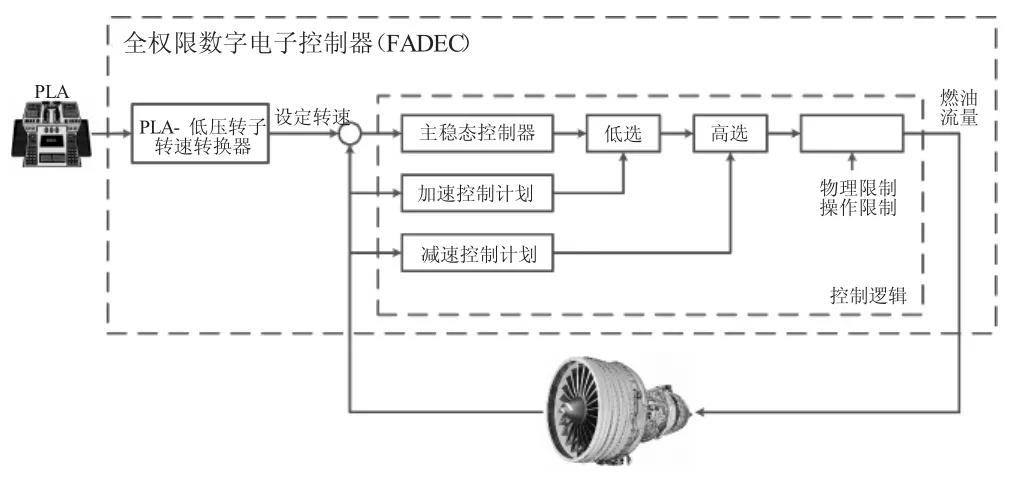
圖1 典型渦扇發(fā)動(dòng)機(jī)控制系統(tǒng)
1.2 穩(wěn)態(tài)控制器設(shè)計(jì)
為簡(jiǎn)化設(shè)計(jì),主穩(wěn)態(tài)控制器(MSSC,Master Steady State Controller)控制規(guī)律選取WFM→nL=const,控制器形式選取增益調(diào)度PID控制器,調(diào)度參數(shù)取為nL(WFM,nL,nH分別表示主燃油量、低壓轉(zhuǎn)子轉(zhuǎn)速、高壓轉(zhuǎn)子轉(zhuǎn)速)。
選取狀態(tài)量x=[nLnH]T,控制量u=WFM,通過(guò)線性化部件級(jí)模型得到地面狀態(tài)下低功率60%nL,d至高功率100%nL,d的41個(gè)發(fā)動(dòng)機(jī)狀態(tài)變量模型(步長(zhǎng)為1% nL,d)。針對(duì)各狀態(tài)變量模型整定PID參數(shù)并進(jìn)行平滑處理,主穩(wěn)態(tài)控制器工作時(shí)根據(jù)調(diào)度參數(shù)nL插值得到PID參數(shù)。
航空發(fā)動(dòng)機(jī)數(shù)控系統(tǒng)的開發(fā)過(guò)程中常需要處理參數(shù)極限、執(zhí)行機(jī)構(gòu)位置極限和變化速率等限制問(wèn)題,并解決由此產(chǎn)生的積分器飽和問(wèn)題,避免發(fā)動(dòng)機(jī)的動(dòng)態(tài)性能降低[10]。當(dāng)燃油流量變化率過(guò)大或燃油流量超出極限范圍時(shí),本文采取重置積分器的抗積分飽和措施:預(yù)先記錄穩(wěn)態(tài)下nL與WFM的對(duì)應(yīng)關(guān)系,重置積分器時(shí),根據(jù)調(diào)度參數(shù)nL插值得到對(duì)應(yīng)的WFM并將其作為積分器的初值。穩(wěn)態(tài)供油曲線(Uss)與加/減速供油曲線的比較如圖2所示。
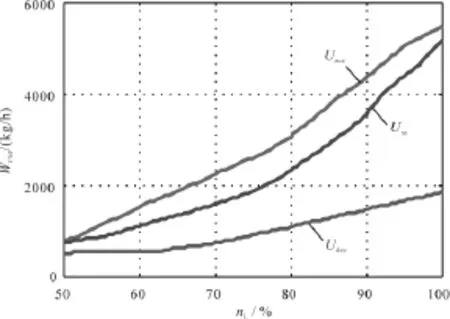
圖2 加/減速控制計(jì)劃
1.3 加/減速控制計(jì)劃設(shè)計(jì)
陸軍[11]等提出使用“動(dòng)態(tài)穩(wěn)定法”設(shè)計(jì)加/減速控制計(jì)劃,該方法在發(fā)動(dòng)機(jī)動(dòng)態(tài)特性計(jì)算模型的基礎(chǔ)上,通過(guò)額外提取狀態(tài)變化率使得共同工作方程偏差趨于0,并根據(jù)物理約束對(duì)控制計(jì)劃曲線進(jìn)行迭代直至符合設(shè)計(jì)要求,根據(jù)“動(dòng)態(tài)穩(wěn)定法”設(shè)計(jì)的加/減速控制計(jì)劃如圖2所示。
1.4 極限保護(hù)器設(shè)計(jì)
極限保護(hù)器通過(guò)附加強(qiáng)制性的限制對(duì)發(fā)動(dòng)機(jī)加以保護(hù)。當(dāng)發(fā)動(dòng)機(jī)性能衰退時(shí),使用極限保護(hù)器可以減少對(duì)于控制系統(tǒng)的調(diào)整工作。本文針對(duì)高壓渦輪進(jìn)口總溫T41及主燃燒室油氣比go設(shè)計(jì)極限保護(hù)器,這2個(gè)參數(shù)均無(wú)法通過(guò)直接測(cè)量得到,需應(yīng)用估值技術(shù)對(duì)其進(jìn)行估計(jì),得到被保護(hù)參及其極限值,見表1。
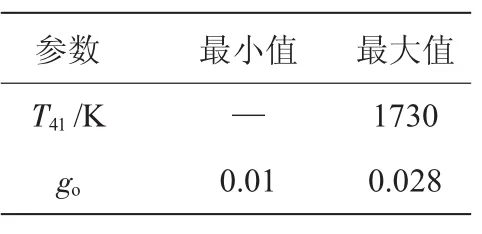
表1 被保護(hù)參數(shù)及其極限值
極限保護(hù)器采用從反饋極限控制器(SFLC)的形式。該種極限保護(hù)器根據(jù)被保護(hù)參數(shù)與極限值之間的偏差大小對(duì)低壓轉(zhuǎn)子轉(zhuǎn)速指令做相應(yīng)的修正(本文采用PID控制算法),間接地實(shí)現(xiàn)對(duì)參數(shù)的保護(hù)作用。極限保護(hù)器的控制作用總是單向的,即其僅在被保護(hù)參數(shù)超限時(shí)才發(fā)出修正指令[12]。加入SFLC的發(fā)動(dòng)機(jī)控制系統(tǒng)結(jié)構(gòu)如圖3所示。
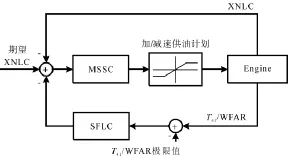
圖3 發(fā)動(dòng)機(jī)控制系統(tǒng)結(jié)構(gòu)
當(dāng)有多個(gè)被保護(hù)參數(shù)時(shí),需設(shè)計(jì)多重極限保護(hù)器對(duì)其進(jìn)行保護(hù)。多重極限保護(hù)器的2種共同工作方式如圖4所示。即“平等表決(equal voting)”和“領(lǐng)導(dǎo)-跟蹤型表決(leader-follower)”。“平等表決”將各極限保護(hù)器的輸出疊加起來(lái),使參數(shù)更快地遠(yuǎn)離極限值,其共同工作方式存在易使低壓轉(zhuǎn)子轉(zhuǎn)速產(chǎn)生較大波動(dòng)的缺點(diǎn);“領(lǐng)導(dǎo)-跟蹤型表決”則僅使得修正作用最大的極限保護(hù)器生效。本文選取“領(lǐng)導(dǎo)-跟蹤型表決”作為多重極限保護(hù)器的共同工作方式。
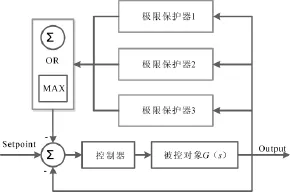
圖4 多重極限保護(hù)器的共同工作方式
2 性能退化緩解控制
2.1 智能改進(jìn)控制架構(gòu)
應(yīng)用性能退化緩解控制技術(shù)后的智能改進(jìn)控制架構(gòu)如圖5所示。圖中綠色部分為在原控制系統(tǒng)基礎(chǔ)上添加的外環(huán)推力控制回路。該控制回路由推力設(shè)定邏輯、推力估值器及轉(zhuǎn)速指令修正器3部分構(gòu)成:其中推力設(shè)定邏輯根據(jù)發(fā)動(dòng)機(jī)的工作條件及退化程度設(shè)定期望推力,在補(bǔ)償推力損失的同時(shí)避免發(fā)動(dòng)機(jī)進(jìn)入到不安全的工作狀態(tài)中;推力估值器通過(guò)卡爾曼濾波技術(shù)[13-15]實(shí)現(xiàn)對(duì)推力的精準(zhǔn)估計(jì);轉(zhuǎn)速指令修正器根據(jù)推力誤差產(chǎn)生合適的轉(zhuǎn)速修正指令,使發(fā)動(dòng)機(jī)推力趨向于設(shè)定推力。
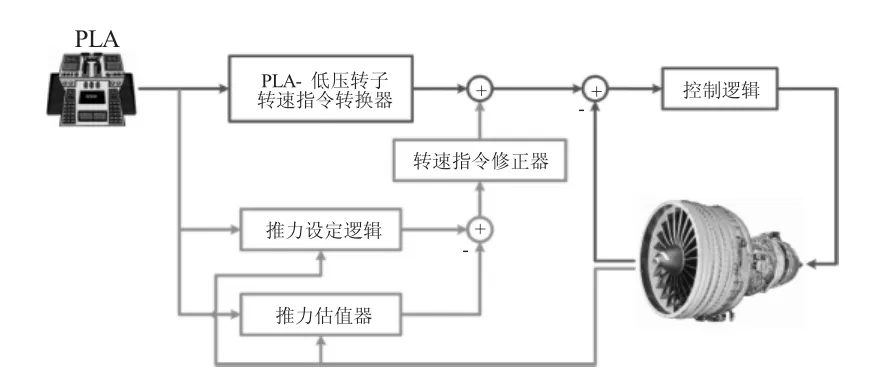
圖5 渦扇發(fā)動(dòng)機(jī)智能改進(jìn)控制架構(gòu)
2.2 推力設(shè)定邏輯
外環(huán)控制回路的目的在于通過(guò)調(diào)節(jié)轉(zhuǎn)速指令使退化推力恢復(fù)至標(biāo)稱值,這意味著設(shè)定推力不應(yīng)超過(guò)未退化時(shí)的標(biāo)稱推力,此外設(shè)定推力應(yīng)在發(fā)動(dòng)機(jī)安全可達(dá)的范圍內(nèi),故應(yīng)選取標(biāo)稱推力和最大安全推力中的較小者作為設(shè)定推力。
根據(jù)上述思想,需先求得不同退化程度下的最大安全推力。以地面最大轉(zhuǎn)速為例,當(dāng)發(fā)動(dòng)機(jī)退化時(shí),極限保護(hù)器會(huì)通過(guò)降低低壓轉(zhuǎn)子轉(zhuǎn)速避免參數(shù)超限,發(fā)動(dòng)機(jī)工作穩(wěn)定時(shí)的推力即是該退化程度下的最大安全推力。
為了不失一般性,假設(shè)在退化過(guò)程中壓氣機(jī)和渦輪的流量和效率因子均發(fā)生同等程度的退化,此時(shí)發(fā)動(dòng)機(jī)退化程度可用單參數(shù)進(jìn)行描述。在地面條件下退化程度與最大安全推力的對(duì)應(yīng)關(guān)系如圖6所示。
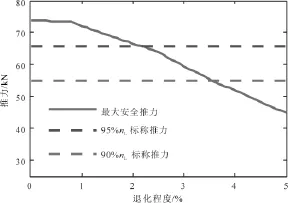
圖6 在地面狀態(tài)下的最大安全推力
進(jìn)一步將推力設(shè)定邏輯向全包線拓展,易知最大安全推力由退化程度、飛行高度和馬赫數(shù)共同決定。飛行包線內(nèi)的最大安全推力如圖7所示。
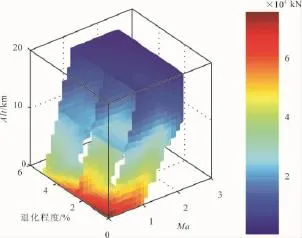
圖7 飛行包線內(nèi)的最大安全推力
2.3 轉(zhuǎn)速修正器的設(shè)計(jì)
轉(zhuǎn)速修正器根據(jù)設(shè)定推力與實(shí)際推力間的偏差對(duì)低壓轉(zhuǎn)子轉(zhuǎn)速指令進(jìn)行修正,使發(fā)動(dòng)機(jī)推力趨向于設(shè)定推力,維持PLA與推力的對(duì)應(yīng)關(guān)系近似不變。本文參考多級(jí)串行控制器設(shè)計(jì)原理,選用PID作為轉(zhuǎn)速指令修正器的修正算法。
在智能改進(jìn)控制架構(gòu)中,轉(zhuǎn)速修正器與內(nèi)環(huán)的極限保護(hù)器均通過(guò)調(diào)節(jié)低壓轉(zhuǎn)子轉(zhuǎn)速指令實(shí)現(xiàn)相應(yīng)的控制功能:隨著退化程度的加深,渦輪前總溫及主燃燒室油氣比等參數(shù)將逐漸增大直至超出發(fā)動(dòng)機(jī)所允許的物理限制,此時(shí)SFLC通過(guò)減小低壓轉(zhuǎn)子轉(zhuǎn)速指令使得參數(shù)重新回到安全的范圍內(nèi);在發(fā)動(dòng)機(jī)參數(shù)不超限的前提下,轉(zhuǎn)速修正器通過(guò)增大低壓轉(zhuǎn)子轉(zhuǎn)速指令補(bǔ)償推力損失。當(dāng)二者的修正作用沖突時(shí)應(yīng)優(yōu)先確保發(fā)動(dòng)機(jī)安全穩(wěn)定工作,故需設(shè)計(jì)合理的切換邏輯保證內(nèi)外環(huán)控制器協(xié)調(diào)工作。當(dāng)SFLC工作時(shí),本文采取凍結(jié)轉(zhuǎn)速修正器輸出的方法實(shí)現(xiàn)內(nèi)外環(huán)控制器的無(wú)擾切換。此外采用凍結(jié)而非重置的切換方式具有防止轉(zhuǎn)速指令突變,避免控制系統(tǒng)振蕩的好處。
3 控制系統(tǒng)仿真驗(yàn)證
在MATLAB/Simulink仿真環(huán)境下對(duì)EPDMC的可行性和有效性進(jìn)行了驗(yàn)證。為實(shí)現(xiàn)對(duì)發(fā)動(dòng)機(jī)退化過(guò)程的準(zhǔn)確模擬和快速仿真,需對(duì)退化的快慢程度進(jìn)行合理地設(shè)定:退化的速率不宜設(shè)定過(guò)快,以避免發(fā)動(dòng)機(jī)處于明顯的非穩(wěn)態(tài)狀態(tài)中;退化速率也不宜設(shè)定過(guò)慢,在滿足仿真精度的前提下,可以適當(dāng)增加退化速率以縮短仿真時(shí)間,以便于觀察控制系統(tǒng)應(yīng)對(duì)退化的補(bǔ)償效果。
應(yīng)用EPDMC技術(shù)前、后的地面退化仿真曲線分別如圖8、9所示,仿真條件為:設(shè)定低壓轉(zhuǎn)子轉(zhuǎn)速指令nL=90%nL,d,初始時(shí)刻發(fā)動(dòng)機(jī)為全健康狀態(tài),5~15 s間壓氣機(jī)與渦輪的流量和效率因子發(fā)生線性退化,最終退化程度如圖8所示(0%、1%、3%、5%)。
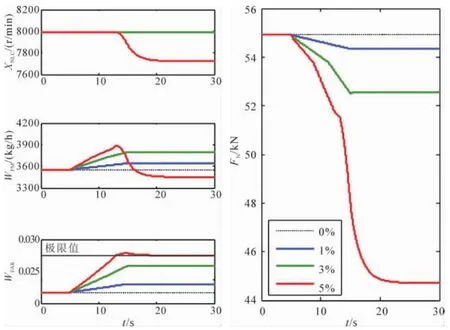
圖8 地面不同退化程度下的發(fā)動(dòng)機(jī)參數(shù)
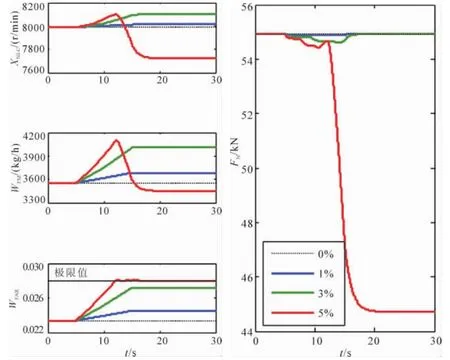
圖9 應(yīng)用EPDMC技術(shù)后的地面發(fā)動(dòng)機(jī)退化參數(shù)
從圖8中可見,發(fā)動(dòng)機(jī)退化導(dǎo)致推力大幅減小。隨著發(fā)動(dòng)機(jī)退化程度的加深,油氣比逐漸超出極限值,極限保護(hù)器通過(guò)調(diào)整轉(zhuǎn)速指令降低供油量,避免發(fā)動(dòng)機(jī)富油熄火,確保發(fā)動(dòng)機(jī)安全穩(wěn)定工作。
從圖9中可見,在外環(huán)推力控制回路通過(guò)增大低壓轉(zhuǎn)子轉(zhuǎn)速補(bǔ)償性能衰退導(dǎo)致的推力損失。當(dāng)退化程度較低時(shí),推力可以迅速恢復(fù)至標(biāo)稱推力,此時(shí)燃油流量和油氣比均高于圖8中的相應(yīng)參數(shù),但仍在限制范圍之內(nèi);但隨著退化程度的進(jìn)一步加深,被保護(hù)參數(shù)逐漸超出極限值,推力無(wú)法在安全范圍內(nèi)恢復(fù)至標(biāo)稱值,此時(shí)系統(tǒng)凍結(jié)轉(zhuǎn)速指令修正器的輸出,SFLC通過(guò)降低低壓轉(zhuǎn)子轉(zhuǎn)速指令優(yōu)先確保發(fā)動(dòng)機(jī)安全穩(wěn)定工作。
4 結(jié)論
對(duì)不同退化程度下的智能改進(jìn)控制系統(tǒng)進(jìn)行地面仿真測(cè)試,其仿真結(jié)果表明,采用EPDMC技術(shù)的智能改進(jìn)控制架構(gòu)能夠在保證發(fā)動(dòng)機(jī)安全工作的前提下,通過(guò)合理地設(shè)定期望推力,有效地彌補(bǔ)因性能退化導(dǎo)致的推力損失,保證PLA與推力間的對(duì)應(yīng)關(guān)系與全健康狀況下一致。
可從以下方面開展進(jìn)一步研究:
(1)假設(shè)退化過(guò)程中旋轉(zhuǎn)部件的流量和效率因子均發(fā)生同等程度的退化,實(shí)際應(yīng)用時(shí)應(yīng)基于統(tǒng)計(jì)原理或性能衰退機(jī)理建立發(fā)動(dòng)機(jī)旋轉(zhuǎn)部件的退化數(shù)學(xué)模型,以更好地模擬真實(shí)的退化過(guò)程。
(2)健康參數(shù)和推力需通過(guò)估值技術(shù)進(jìn)行在線估計(jì),但現(xiàn)有的估值方法在估值精度、工程實(shí)現(xiàn)性、計(jì)算量等方面有著不同的要求和限制,如何快速而準(zhǔn)確地對(duì)參數(shù)進(jìn)行估計(jì)仍是亟待解決的問(wèn)題。
[1]姚彥龍,孫健國(guó).基于神經(jīng)網(wǎng)絡(luò)逆控制的發(fā)動(dòng)機(jī)直接推力控制[J].推進(jìn)技術(shù),2008,29(2):249-252. YAO Yanlong,SUN Jianguo.Aeroengine direct thrust control based on neural network inverse control[J].Journal of Propulsion Technology,2008,29(2):249-252.(in Chinese)
[2]李秋紅,李業(yè)波,王前宇.航空發(fā)動(dòng)機(jī)直接推力控制[J].南京航空航天大學(xué)學(xué)報(bào),2010,42(5):557-561. LI Qiuhong,LI Yebo,WANG Qianyu.Direct thrust control of aeroengine[J].Journal of Nanjing University of Aeronautics and Astronautics,2010,42(5):557-561.(in Chinese)
[3]Litt J S,Aylward E M.Adaptive detuning of a multivariable controller inresponsetoturbofanenginedegradation[R].NASA-TM-2003-212723.
[4]Litt J S,Parker K I,Chatterjee S.Adaptive gas turbine engine control for deterioration compensation due toaging[R].NASA-TM-2003-212607.
[5]Litt J S,Sowers T S.Evaluation of an outer loop retrofit architecture for intelligent turbofan engine thrust control[R].AIAA-2006-5103.
[6]Litt J S,Sowers T S,Garg S.A retrofit control architecture to maintain engine performance with usage[J].NASA-TM-2007-214977.
[7]李業(yè)波,李秋紅,黃向華,等.航空發(fā)動(dòng)機(jī)性能退化緩解控制技術(shù)[J].航空動(dòng)力學(xué)報(bào),2012,27(4):930-936. LI Yebo,LI Qiuhong,HUANG Xianghua,et al.Performance deterioration mitigation control of aeroengine[J].Journal of Aerospace Power,2012,27(4):930-936.(in Chinese)
[8]陸軍,郭迎清,陳小磊.線性擬合法建立航空發(fā)動(dòng)機(jī)狀態(tài)變量模型[J].航空動(dòng)力學(xué)報(bào),2011,26(5):1172-1177. LU Jun,GUO Yingqing,CHEN Xiaolei.Establishment of aeroengine state variable model based on linear fitting method[J].Journal of Aerospace Power,2011,26(5):1172-1177.(in Chinese)
[9]吳君鳳,郭迎清.發(fā)動(dòng)機(jī)穩(wěn)態(tài)與過(guò)渡態(tài)控制集成設(shè)計(jì)仿真驗(yàn)證[J].航空動(dòng)力學(xué)報(bào),2013(6):1436-1440. WU Junfeng,GUO Yingqing.Design and simulation of aeroengine steadystate and transient state control integration[J].Journal ofAerospace Power,2013(6):1436-1440.(in Chinese)
[10]王磊,王曦,何皚,等.基于LMI的渦扇發(fā)動(dòng)機(jī)抗積分飽和PI控制[J].推進(jìn)技術(shù),2010,31(2):210-215. WANG Lei,WANG Xi,HE Kai,et al.Integral wind-up protection PI control for turbofan engine based on LMI[J].Journal of Propulsion Technology,2010,31(2):210-215.(in Chinese)
[11]陸軍,郭迎清,王磊.航空發(fā)動(dòng)機(jī)過(guò)渡態(tài)最優(yōu)控制規(guī)律設(shè)計(jì)的新方法[J].航空動(dòng)力學(xué)報(bào),2012,27(8):1914-1920. LU Jun,GUO Yingqing,WANG Lei.A new method for designing optimal control law of aeroengine in transient states[J].Journal of Aerospace Power,2012,27(8):1914-1920.(in Chinese)
[12]Jaw L C,Mattingly J D.Aircraft engine controls:design,system analysis,and health monitoring[M].American Institute of Aeronautics and Astronautics,2009:112.
[13]袁春飛,姚華.基于卡爾曼濾波器和遺傳算法的航空發(fā)動(dòng)機(jī)性能診斷[J].推進(jìn)技術(shù),2007(1):9-13. YUAN Chunhua,YAO Hua.Development of Kalman filter and genetic algorithm for aeroengine performance diagnostics[J].Journal of Propulsion Technology,2007(1):9-13.(in Chinese)
[14]黃偉斌,黃金泉.航空發(fā)動(dòng)機(jī)故障診斷的機(jī)載自適應(yīng)模型[J].航空動(dòng)力學(xué)報(bào),2008(3):580-584. HUANG Weibing,HUANG Jinquan.On board self-tuning model for aeroengine fault diagnostics[J].Journal of Aerospace Power,2008(3):580-584.(in Chinese)
[15]陸軍,郭迎清,張書剛.基于改進(jìn)混合卡爾曼濾波器的航空發(fā)動(dòng)機(jī)機(jī)載自適應(yīng)模型[J].航空動(dòng)力學(xué)報(bào),2011,26(11):2593-2600. LU Jun,GUO Yingqing,ZHANG Shugang.Aeroegine onboard adaptive model based on improved hybrid Kalman filter[J].Journal of Aerospace Power,2011,26(11):2593-2600.(in Chinese)
(編輯:張寶玲)
Research on Performance Deterioration Mitigating Control of Turbofan Engine and Thrust Setting
LI Rui-chao,GUO Ying-qing
(School of Power and Energy,Northwestern Polytechnical University,Xi'an 710072,China)
In order to compensate thrust loss of a deterioration turbofan engine,reduce pilot workload and increase the level of autonomy of the propulsion system,an investigation of the turbofan engine performance deterioration mitigating control(EPDMC)was conducted. An engine control system was designed firstly based on an unnamed low-bypass mixed exhaust turbofan engine with steady state control, acceleration/deceleration schedules and limit logic.Then an outer thrust loop based on the control system was investigated,with thrust setting method under multi-parameter constraints and controller switching logic ensuring coordination between inner and outer loop.The simulation results of MATLAB/Simulink tools indicate that the feasibility of the intelligent retrofit control architecture compensate the thrust loss and remain the throttle-to-thrust relationship unchanged approximately.
EPDMC;performance deterioration;intelligent retrofit control;thrust setting;turbofan engine
V 233.7
A
10.13477/j.cnki.aeroengine.2015.02.003
2014-03-04 基金項(xiàng)目:航空科學(xué)基金(2011ZB53)資助
李睿超(1993),男,在讀博士研究生,研究方向?yàn)楹娇瞻l(fā)動(dòng)機(jī)控制與仿真;E-mail:herohere@mail.nwpu.edu.cn。
李睿超,郭迎清.渦扇發(fā)動(dòng)機(jī)性能退化緩解控制與推力設(shè)定研究[J].航空發(fā)動(dòng)機(jī),2015,41(2):12-16.LI Ruichao,GUOYingqing.Research on turbofan engine performance deterioration mitigatingcontrol and thrust setting[J].Aeroengine,2015,41(2):12-16.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
西安航空學(xué)院學(xué)報(bào)(2014年5期)2014-07-13 01:27:52
機(jī)電信息(2014年27期)2014-02-27 15:53:56
汽車與新動(dòng)力(2014年2期)2014-02-27 12:10:15
