模塊化群體機器人構型分析與自組裝控制
2018-09-19 03:40:48孫紹榮
數碼設計 2018年3期
孫紹榮
(遼寧省撫順市四方高級中學,遼寧撫順,113000)
引言
當前,機器人自組裝的研究相對較多,并在模塊化方面取得了較好的成績,實現了自重構機器人的自主對接,解決了兩個模塊之間的快速分離和連接。不僅如此,為了支持機器人的整體運動,還需要保證這一過程中的連接強度。在兩個機器人移動到可對接的位置附近時,需要這個對接機構能夠解決相對位置中出現的偏差,否則兩個機器人就無法實現可靠對接。而本文將對這一過程進行相應的研究,明確模塊化群體機器人的結構,并指出高效自組裝控制的策略[1]。
1 Sambot機器人平臺簡介
Sambot機器人平臺,是北京航天航空大學開發的一種新的自組裝模塊化機器人平臺,在該平臺中每一個Sambot機器人都都能夠實現自主對接、自主移動,并在此基礎上形成了多個機器人構成的機器人結構,這種結構具有類似自重構模塊化機器人,且具有自重構與整體運動的功能。具體下下圖1所示。Sambot機器人平臺初步解決了群體機器人與自重構機器人結合的問題。相對來說,機器人結構的群體系統,需要通過個體機器人之間的相互連接、分離,并構建起多個機器人自動適應空間,以及其他的一些復雜非結構化環境的變化形態和神經。然而,當前我國群體機器人系統的研究,較少關注個體機器人的自主連接能力,已開發出的群體機器人的協同作業水平相對較低,不僅如此,初始構型過程中還存在手工構型的問題,這對于群體機器人自主運動、實際應用方面產生了較為不利的影響[2]。

圖1 Sambot機器人產品展示
2 Sambot機器人平臺的構型分析與自組裝控制
基于上述對Sambot機器人平臺的分析,本文將對該平臺的額機器人進行構型分析與自組裝分析。
2.1 Sambot機器人的構型分析
根據圖1所示的Sambot機器人展示,本文將Sambot機器人進行相應的簡化,具體來說,根據Sambot機器人的功能可以將其轉化為由兩個連桿組成的單自由度模塊,在這個簡化圖中的中心圓點就表示Sambot的本體中心,在圖2構型圖是其旋轉中心。
在起構型的過程中,可以將其分為兩種,一是線性構型,另外一種就是多足構型,其中,線性構型的連接相對較為簡單,只要有多個Sambot進行前后串行連接就可以實現構型,在這種線性構型中也可以呈現出直線型或者是環形兩種形態。而在多足型構型則是由多個模塊組合成足進而形成一種多足構型的形態。在起連接的過程中,如果是主動連接,則表示該面主動的與其他模塊連接,設置初始狀態為“1”。此時,該Sambot只能通過1、3兩個面與其他的模塊連接,具體如圖3所示[3]。
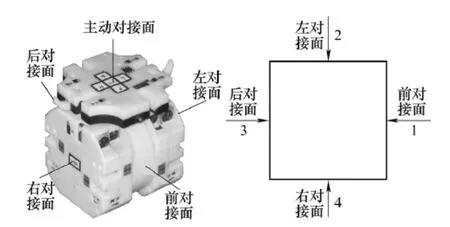
圖3 Sambot對接展示
當其采用被動連接的時候,其狀態可以設置為“-1”,在這樣的情況下,該模塊的1、2、3、4面都是可以與其他的Sambot進行連接。值得注意的一點是,每一個Sambot只有一個主對接面,在進行主動連接的時候只能夠與其他前方的Sambot或者是后方的Sambot進行連接[4]。
2.2 Sambot的自組裝控制
對于Sambot的自組裝,則是從給定構型的種子機器人開始,在與環境中的其他機器人進行對接時,其自組裝規則則需要構型中的種子機器人與對接機器人執行,在當前Sambot平臺上,每一個模塊都是允許其他機器人從四個面進行對接,因此,在自組裝規則可以表示 AR=(F,L,B,R)。在自組裝的過程中,種子機器人與對接機器人需要對當前的連接狀況進行分析,并與目標構型中的狀態進行比較,并在此基礎上做出相應的判斷,自行做出決定執行具體的對接規則。由于對接機器人本身是沒有任何的構型信息的,所以完成構型對接的過程中,需要根據其紅外傳感器的感知能力控制器行為。在對接機器人運行的過程中,包括漫游、導航或者是對接、連接過程中,需要基于其行為采取相應的控制方法。具體來說,在漫游的過程中,采取隨機軌跡進行漫游時需自動避障傳感器。在導航時需要確保連接機器人在種子機器人的紅外探測傳感器檢測到的范圍內,一旦進入對接狀態需要作出相對位置的判斷,并與種子機器人的電氣觸點接觸,兩者之間發送握手信號并進行總線通聯。
3 結束語
本文針對于Sambot機器人平臺進行了簡單的分析,并在此基礎上指出了Sambot機器人的構型與自組裝過程。由于該模塊在實際操作中具有較高的難度,因此,本文將其中的重點環節進行了詳細的介紹,并以一種較為簡單的形式進行了闡述,旨在為提升模塊化群體機器人構型教育教學的效率[5]。
[1]付慶科.中小學機器人教學的網絡學習支持環境研究[J].華南師范大學,2007.
[2]魏洪興, 李海源.空間探測自組裝群體模塊化機器人[J].航天器工程,2011, (07): 72-78.
[3]林義忠, 劉慶國, 徐俊, 等.機器人離線編程系統研究現狀與發展趨勢[J].機電一體化, 2015, (11): 8.
[4]鄭榮.機器人編程系統設計與研究[J].產品與技術, 2010, (05): 90.
[5]劉極峰, 易際明.機器人技術基礎[M].北京: 高等教育出版社, 2006:78.
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
現代裝飾(2020年5期)2020-05-30 13:01:56
電子制作(2018年18期)2018-11-14 01:48:24
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44