機載小型化星敏感器遮光罩設計*
2014-12-31 12:18:52胡曉東劉元正王繼良
傳感器與微系統 2014年6期
胡曉東,胡 強,雷 興,魏 青,劉元正,王繼良
(中國航空工業集團公司西安飛行自動控制研究所,陜西西安 710065)
0 引言
星敏感器是機載天文導航系統中的重要部件,它是通過實時拍攝星圖,再進行星圖識別和姿態解算實現對載體的導航。星敏感器探測的目標信號通常十分微弱,白天工作時,背景光的輻射強度遠遠大于信號本身的強度,給準確探測目標帶來很大困難。由于強雜光的影響,目標很容易受到干擾,甚至目標信號被背景光淹沒,從而導致目標失真[1],因此,星敏感器消雜光系統的設計就變得至關重要。消雜光技術是星敏感器的核心技術之一,雜散光消除效果的好壞將直接決定星敏感器系統能否正常工作[2]。
本文根據星敏感器成像系統自身的特性與消雜光設計基本原則,對機載小型化星敏感器的遮光罩進行了設計,利用Matlab計算出遮光罩的尺寸,確定擋光環的位置,結合CAD作圖軟件對基于該消雜光系統的星敏感器鏡頭進行了建模,并使用雜光分析軟件TracePro對遮光罩的消雜光效果進行了仿真和分析,給出了點源透過率曲線。結果表明:當離軸角度大于太陽規避角時,點源透射比值達到10-10量級,滿足實際工程需要。
1 遮光罩設計實例
以某機載星敏感器系統的R-C型折反式光學系統為例,該結構示意圖如圖1所示,主、次鏡曲率半徑分別為R1=-188.346 mm,R2=-99.8 mm。
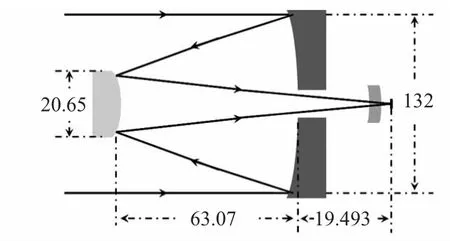
圖1 R-C系統結構示意圖Fig 1 Structure diagram of R-C system
根據設計經驗,一般要求系統的在規避角的點源透射比(point source transmittance,PST)達到10-10量級[3]才能滿足工程需要。對于傳統R-C系統消雜光機構而言,要達到上述消雜光水平,通常需要在鏡頭主體前加一外遮光罩,通過在外遮光罩上合理設置擋光環,遮擋太陽規避角30°以上的雜散光線直接入射,使得雜散光在前遮光罩上的一次反射光不會進入到光學系統內[4]。但是考慮到機載環境的特殊性,要求系統的長度不能太長,因此,本文將主、次鏡間鏡筒的前端部分作為外遮光罩使用,按照外遮光罩的設計方法進行設計,以壓縮整個消雜光系統的長度。
在儀器視場角θ、入瞳直徑D0、雜散光源(例如太陽)入射角α等已知的條件下,通過簡單計算可以得到鏡筒前端遮光罩的長度L=255 mm與口徑D'0=160 mm[5],而擋光環的位置通常情況下需要通過作圖法得到。具體地設計步驟如圖2所示,首先連接E與D1,直線ED1與AB的交點X1即為第一個擋光環頂點;再連接F與X1交直線CD1于點D2;然后連接E與D2,直線ED2與AB的交點X2即為第二個擋光環頂點。以此類推,連接F與Xn-1交直線CD1于點Dn,再連接E與Dn,直線EDn與AB的交點Xn即為第n個擋光環頂點。
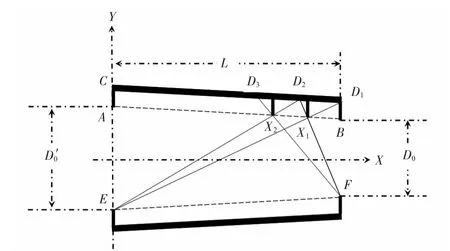
圖2 鏡筒前端遮光罩擋光環設計示意圖Fig 2 Design diagram of the front baffle vanes of lens barrel
本文是在作圖法的基礎上,通過Matlab程序計算出各個擋光環的精確坐標,從而確定其位置,免去了作圖法繁瑣的步驟,在減小誤差的同時也提高了設計效率。首先以光軸為X軸、遮光罩外端口為Y軸建立直角坐標系,由此可得A,B,C,D1,E,F的坐標,根據圖3 所示的流程,在計算機上利用Matlab編程即可得到一系列擋光環頂點的坐標(如表1所示)。此外為了減小擋光環的端面散射,在設計擋光環邊緣時存在一定的傾角,一般取30°,其上端有個倒角,半徑為 0.2 mm,擋光環厚度為 1 mm[4]。
對于遮光系統來說,只使用外遮光罩來遮擋雜光顯然是不夠的,事實上,系統的自身內輻射也會影響性能,在雜光設計分析過程中擋光環和內遮光罩的設計也是很有必要的。
根據R-C系統遮光罩設計的基本原則和具體要求,作出主、次鏡遮光罩示意圖如圖4所示[6]。
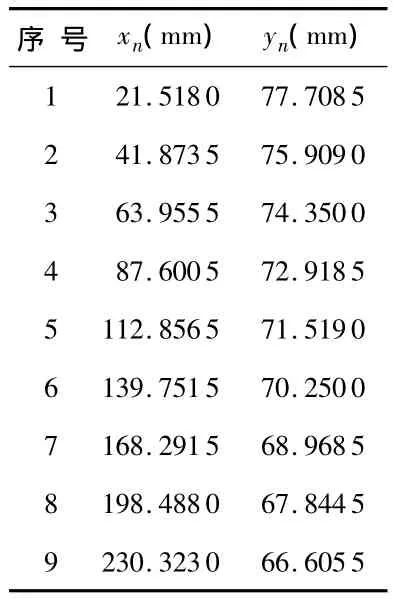
表1 前遮光罩擋光環頂點坐標Tab 1 Vertex coordinates of the front baffle vanes
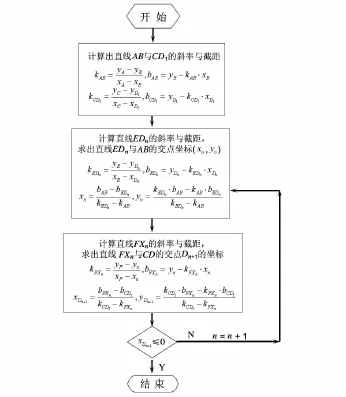
圖3 鏡筒前端遮光罩擋光環計算程序流程圖Fig 3 Flow chart of calculation program of the front baffle vanes of lens barrel
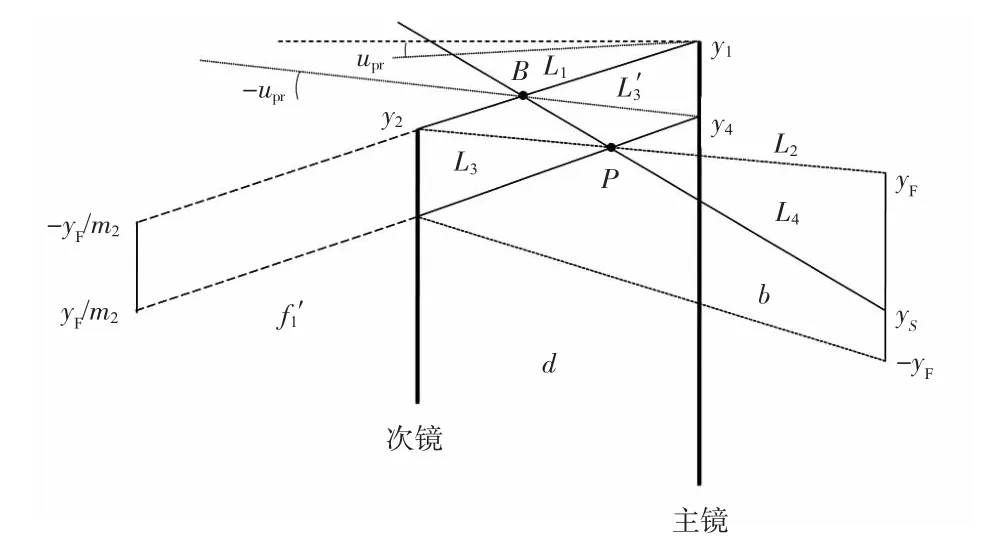
圖4 主、次鏡遮光罩設計示意圖Fig 4 Design diagram of baffle of main and secondary lens
為了使光線均勻照射到像面上,視場內的所有光線必須要通過主、次鏡遮光罩之間的缺口。同時2條視場邊緣光線L1和L2也必須能夠到達像面上。L1和L2決定了主、次鏡遮光罩的最小尺寸。圖4中的光線L4表示一束雜光,它與2條視場邊緣光線L1和L2的交點分別就是主、次鏡遮光罩的端點位置。從圖4中不難看出,對于焦平面上|y|<|yS|的任何位置都沒有雜光可以直接到達。而對于最小漸暈條件,L'3是一條恰好可以通過次鏡遮光罩的達到主鏡上面的邊緣光線。這條光線經主鏡反射后沿L3到達次鏡,而L2,L3和L43條光線必定相較于一點P(zP,yP),該點就是主鏡遮光罩的頂點坐標。
下面分別對上述5條光線的直線方程進行求解。通過分析可以發現,實際上需要確定的獨立變量只有4個分別是主、次鏡遮光罩頂點坐標(zB,yB)和(zP,yP)。雖然視場邊緣光線打到主鏡上的坐標y4也是未知的,但是,它完全可以通過次鏡遮光罩的位置來求得。
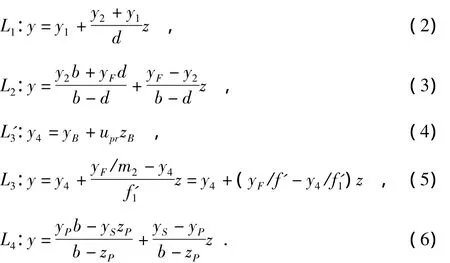
如果設光線Li的方程為

則由圖4可得
為了簡化公式,用b1和a2來代替式(2)和式(3)中的斜率和截距。首先對L3和L4的交點B(zB,yB)進行求解
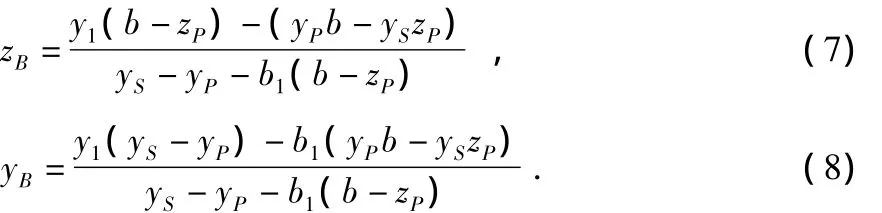
將式(7)和式(8)代入式(4)中可得

接下來對于L2和L3的交點P(zP,yP)進行求解
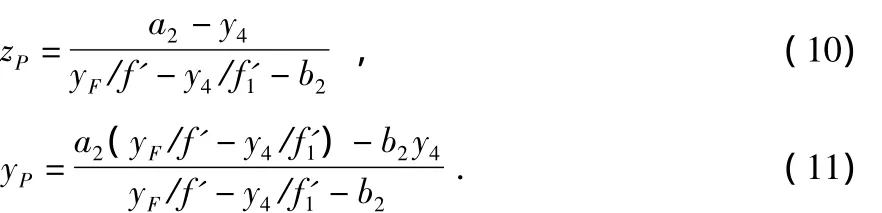
在式(9)中對于y4的描述使用了zP和yP兩個未知的參數,而式(10)和式(11)則給出了用y4描述的zP和yP的表達式。將式(10)和式(11)代入式(9)中可以得到一個關于y4的一元二次方程

其中
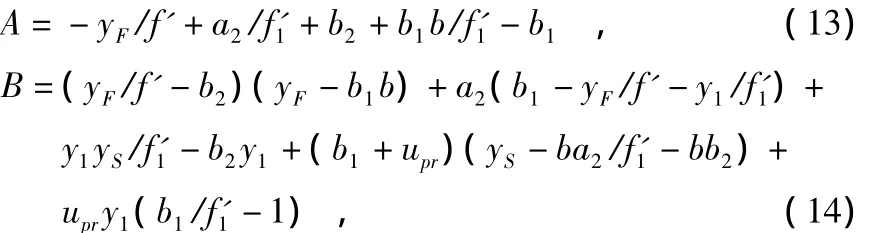

根據一元二次方程的求根公式對式(12)進行求解。然后代入式(10)和式(11)中得到zP和yP。最后代入到式(7)和式(8)中得到次鏡遮光罩的頂點坐標(zB,yB)。
如圖5所示,在本文中為了減小系統遮攔,次鏡遮光罩采用了百葉窗形式,同時在主鏡遮光罩內添加了一系列擋光環,進一步提升系統的消雜光能力[7]。根據已經求得的B點及P點的坐標,以及光線的直線方程,可以得到各個擋光環頂點的坐標,具體數值見表2和表3。

圖5 主鏡擋光環、次鏡百葉窗設計示意圖Fig 5 Diagram of the main lens baffle vanes and secondary lens baffle louver
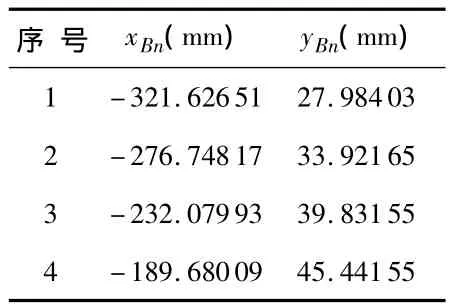
表2 次鏡百葉窗頂點坐標Tab 2 Vertex coordinates of the secondary lens baffle louver
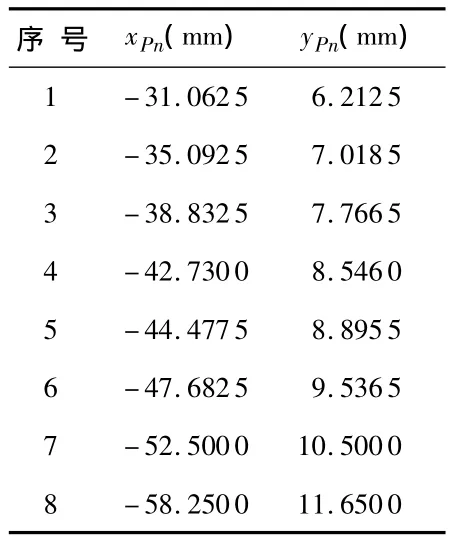
表3 主鏡遮光罩擋光環頂點坐標Tab 3 Vertex coordinates of the main lens baffle vanes
R-C系統中,主、次鏡間的鏡筒阻止外界雜散光直接入射到像面,但鏡筒表面本身具有一定反射率,鏡筒內壁的部分表面實際上充當關鍵表面或光源直接照射表面甚至同時充當這兩類表面[8]。因此,當有雜散光輻射到鏡筒內壁某些表面上時,可能反射到反射鏡面,多次反射后到達像面形成干擾。這些經由鏡筒內壁和光學元件表面的多次反射會嚴重降低圖像的對比度,從而影響成像效果。為了盡量減小此類影響,一般要在鏡筒內壁涂覆黑色的消光漆,同時在添加螺紋及擋光環。為此,本文在主、次鏡間鏡筒內壁設計了一定數量的擋光環。
如圖6所示,設鏡筒內壁擋光環等高,并記作H,虛線為不加擋光環時遮光筒的位置。外界雜散光由次鏡邊緣點h入射,在遮光筒內壁上選擇靠近主鏡的一點u與點h和點p連接作為鏡筒接收雜散光的最小角度路徑。在直線uh和直線up與虛線的交點處設置擋光環。依此類推,直到接近遮光筒邊緣為止,便可確定全部擋光環的位置。
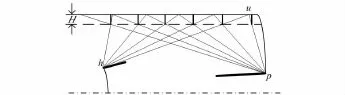
圖6 遮光筒內壁擋光環的設計示意圖Fig 6 Design diagram of the inner wall vanes of baffle
2 遮光罩仿真結果
利用上述設計方法,本文針對太陽規避角30°之外系統消光比小于4.4×10-9的設計指標,對光學系統的消雜光結構進行了詳細設計。如圖7所示,將利用Matlab語言編程得到的擋光環各個頂點坐標使用UG繪制模型。
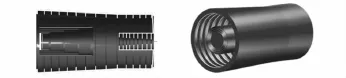
圖7 星敏感器系統消雜光設計圖Fig 7 Design of stray light elimination of star sensor system
使用光學軟件TracePro對整個系統進行的消雜光效果進行仿真。設置各個表面的散射特性,其中光學透鏡表面都設置為鏡面,其它表面都設置為噴砂染黑表面,參數均采用系統默認參數。模擬中設置的光線數為6 003 560條,計算出的消光比曲線如圖8所示,經過多次實驗證明,得出的結果是穩定的。由圖可知隨著離軸角的增大,系統的PST值一直在下降,當離軸角為30°時,其 PST值為5.536×10-10,小于系統要求的PST指標值4.4×10-9,設計的遮光罩能滿足抑制雜散光的性能要求。
3 結論
本文主要就機載小型化星敏感器消雜光技術的相關問題進行了研究。在作圖法的基礎上,利用Matlab語言編程實現了對于R-C系統遮光罩的程序化設計。針對機載環境的特殊性要求,采取了將主、次鏡間鏡筒的前端部分作為外遮光罩的設計方法,壓縮了整個消雜光系統的長度。同時,次鏡遮光罩采用了百葉窗形式,減小了系統遮攔。通過在主鏡遮光罩內添加一系列擋光環的方法,進一步提升了系統的消雜光能力。將得到的擋光環各個頂點坐標使用UG繪制模型,并利用光學設計分析軟件TracePro,采用蒙特—卡羅法對600萬條光線在不同入射角度情況下的點源透射比進行了分析,在30°太陽規避角時的 PST值達到了5.536×10-10,小于系統要求的性能指標。
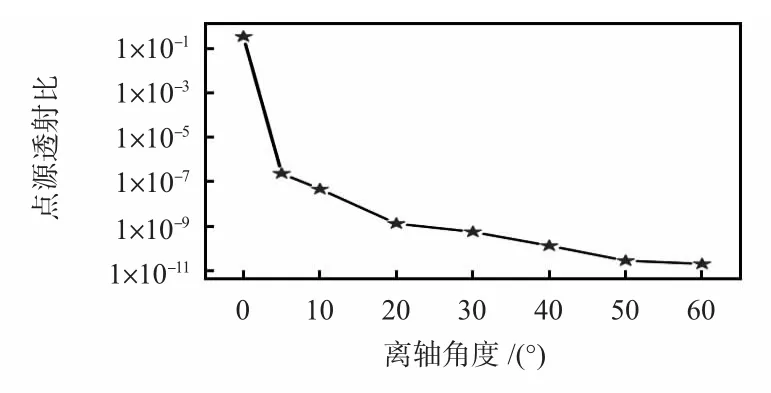
圖8 系統PST曲線Fig 8 PST curve of system
[1]李 婷,楊建峰,阮 萍,等.R-C系統的遮光罩設計與仿真[J].光子學報,2008,37(2):332-336.
[2]廖志波,伏瑞敏,宗肖穎.星敏感器遮光罩的優化設計[J].中國激光,2010,37(4):987-990.
[3]李 蕓,相里斌,李立波.一種新型空間相機遮光罩的設計與仿真[J].光電工程,2010,37(7):41-44.
[4]《光學儀器設計手冊》編輯組.光學儀器設計手冊(下)[M].北京:國防工業出版社,1971:618-621.
[5]閆佩佩,樊學武.R-C光學系統設計及雜散光分析[J].紅外技術,2011,33(4):214-218.
[6]高郭鵬,熊望娥,甘玉泉,等.R-C系統外遮光罩擋光環的程序化設計及錐狀內遮光罩的改進[J].應用光學,2009,30(4):575-579.
[7]鐘 興,張 雷,金 光.反射光學系統雜散光的消除[J].紅外與激光工程,2008,37(2):316-318.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
