實用的MEMS慣性器件外場標定方法*
2014-12-31 12:18:38任建新杜亞寧楊星輝趙興梅
傳感器與微系統 2014年6期
任建新,杜亞寧,楊星輝,趙興梅
(西北工業大學自動化學院,陜西西安 710072)
0 引言
MEMS慣性器件在成本、體積、可靠性等方面具有顯著優勢,但是其發展卻受到精度的制約[1],由于輸出中總是包含著各種誤差項,因此,有必要對它的主要誤差系數進行標定。然而,與傳統的高精度慣性傳感器相比,低精度的MEMS慣性器件有其特殊性,主要表現在零偏重復性和穩定性較差[2];其次,在實際的工程應用中,很少有條件提供高精度的實驗室標定設備[3],因此,設計一種針對MEMS慣性器件的簡易可行的外場標定方法非常有必要。
本文從分析基于ADIS16405型號的MEMS慣性測量單元的誤差模型出發[4],結合基于橢球模值約束的外場標定算法,分別設計了針對MEMS加速度計和MEMS陀螺儀的實驗編排方案,最后對比實際外場標定與實驗室標定結果,證明了該標定方法的可行性。
1 MEMS慣性器件的誤差分析
與傳統的慣性傳感器類似,可將MEMS 慣性器件的誤差主要分為零位誤差、刻度系數誤差和非正交誤差。
其中,δmx0,δmy0,δmz0為 MEMS 三軸傳感器的零位誤差。
2)刻度系數誤差Km是由于三軸傳感器的靈敏度實際輸出與出廠說明書上不同而引起的誤差,則刻度系數誤差為
3)非正交誤差Tm是由于制造時不能保證三軸傳感器測的3個測量軸正交而引起的誤差,當MEMS三軸傳感器的敏感軸不處于正交時,則會引起非正交誤差
綜上所述,MEMS三軸傳感器的誤差模型可以表述為

2 外場標定的原理與算法
在靜態情況下,MEMS加速度計的輸出為當地的重力矢量g,雖然g在空間系的投影未知,但是滿足:
‖g‖2=g,其中,‖g‖2為矢量g的2范數。那么g即為當地重力矢量的模值,它為MEMS加速度計外場標定提供模值約束;MEMS陀螺儀的輸出為地球自轉角速度ωie,然而由于地球自轉角速度太小,基本淹沒在MEMS陀螺儀的噪聲中,無法利用其實現對誤差模型參數的辨識,因此,必須對其施加額外的角運動來完成外場標定,但是,在沒有精密速率轉臺的情況下,施加準確的角速率是不現實的[5],因此,利用角位置來實現角度模值約束。
2.1 MEMS加速度計外場標定算法
假設在理想狀態下不存在傳感器的各項誤差,那么傳感器輸出矢量的模值應該等于約束模值,由式(4)得出

其中,m為約束模值。
對式(5)兩邊進行平方得出
由于 mb=為傳感器的測量真值,則

從式(7)中可以看出,從解析幾何的數學意義角度考慮,理想狀態下三軸傳感器的輸出在三軸坐標系里是以(0,0,0)為圓心,模值約束值m為半徑的標準圓球。然而由于各種誤差的存在,使得球體在坐標系中的形狀和位置發生變化。
1)當MEMS傳感器存在零位誤差時

由式(8)可以得出,在解析幾何意義上,圓球的圓心偏離的原點(0,0,0)變為(δmx0,δmy0,δmz0)。
2)當MEMS傳感器存在刻度系數誤差時

由式(9)可以得出,傳感器的輸出在解析幾何意義上變成一個橢球。
3)當傳感器存在非正交誤差時

令式(10)與一般橢球方程相比較,可以得出傳感器的輸出在解析幾何意義上已經不是一個嚴格意義的橢圓,而是一個關于原點對稱的扁球體。
根據式(4)得出

將式(11)矩陣形式展開分別得出
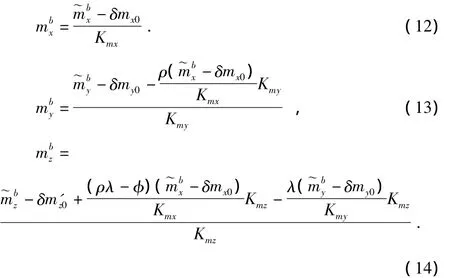
將式(12)、式(13)、式(14)分別代入式(7)構建出包含著零位誤差系數(δmx0,δmy0,δmz0),刻度系數誤差(Kmx,Kmy,Kmz),以及非正交誤差系數(ρ,φ,λ),外場標定的過程就是通過采集n(n>9)組測量數據,通過總體最小二乘法來確定上述9個未知參數,該算法即為橢球模值約束算法[6,7]。
2.2 MEMS陀螺儀外場標定算法
前面提到MEMS陀螺儀標定需要利用角度模值約束,因此,有必要借助輔助設備和MEMS測量單元的自身安裝殼體,通過轉動特殊的角度即角速率陀螺的積分值來實現外場標定。在此分2個步驟進行標定:首先,標定刻度系數誤差和非正交誤差,采用順時針和逆時針的旋轉抵消地球自轉和陀螺零偏;然后,利用已獲得的刻度系數誤差和非正交誤差來標定零偏誤差。
對于第一步的標定,給定一個光滑平面和一個基準平面,繞某一敏感軸手動旋轉MEMS殼體,根據上述式(4)誤差模型得出

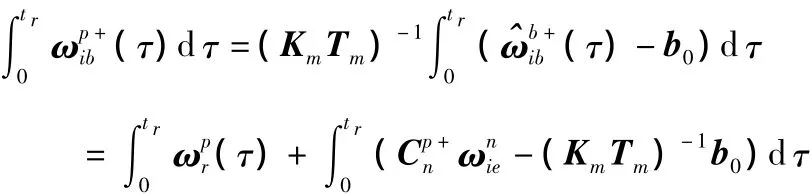

同理,沿著同一個軸逆時針旋轉并積分時,可得出

式中 Δ θ為轉動的已知角度,即以此來提供模值約束。將兩式相減并將等式兩端同時去模值得出

將兩邊同時平方并展開矩陣式得出

將式(20)轉換為橢球形式,從而實現利用橢球模值約束法來標定MEMS陀螺儀。
第二步,標定陀螺儀的零偏,對于靜態情況下的MEMS陀螺儀,由式(4)得出

則進一步得出

兩邊同時平方得出

假設在不同的靜態位置,獲得MEMS陀螺儀輸出為
在求得刻度系數誤差和非正交誤差的基礎上,并且獲得足夠多的靜態位置數據,即可利用總體最小二乘[8]或一般最小二乘[9]來計算零偏誤差。
3 外場標定的過程
1)對于MEMS加速度計來說,當地的重力加速度的模值比較大,因此,完全可以作為加速度計外場標定時的模值約束。為了更加有效地獲得采集數據,在幾何意義上使數據盡可能多地分布在橢球面上,就需要使MEMS慣性器件繞3個敏感軸分別旋轉不同的角度,數據采集過程中必須保持器件固定良好,3個敏感軸分別采集多組數據。
2)對于MEMS陀螺儀來說,選定2個相互垂直的光滑平面,在此選取了實驗室地面和與水平面垂直的方凳側面,將六面體安裝殼體放在水平面緊靠方凳側面,并且在方凳上標記其初始位置,然后繞著垂直水平面的旋轉軸輕輕轉動殼體360°(旋轉的過程盡量保持在水平面上),當殼體與標記初始位置重合即說明旋轉了1周,然后再逆時針旋轉360°,忽略各項誤差,順時針減去逆時針之差為720°。然后再進行先逆時針旋轉,后順時針旋轉,則前后之差為-720°,以此類推3個正交面共可獲得6組數據。然后再將MEMS器件在殼體中變換不同的角度,再進行上述測量,以獲得更多的數據。
3)在實驗室條件下,采用位置轉臺對MEMS加速度計進行1gn范圍內的標定;采用速率轉臺設定多組不同的速率值對MEMS陀螺儀進行標定,最終得出實驗室標定結果與外場標定結果的比較如表1和表2所示。
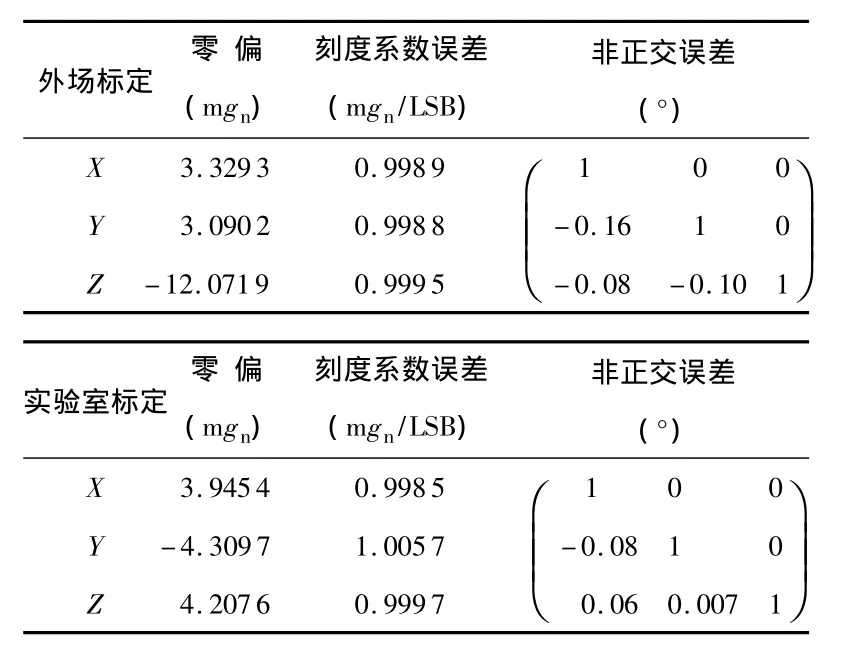
表1 MEMS加速度計標定結果Tab 1 Result of calibration for MEMS accelerometer
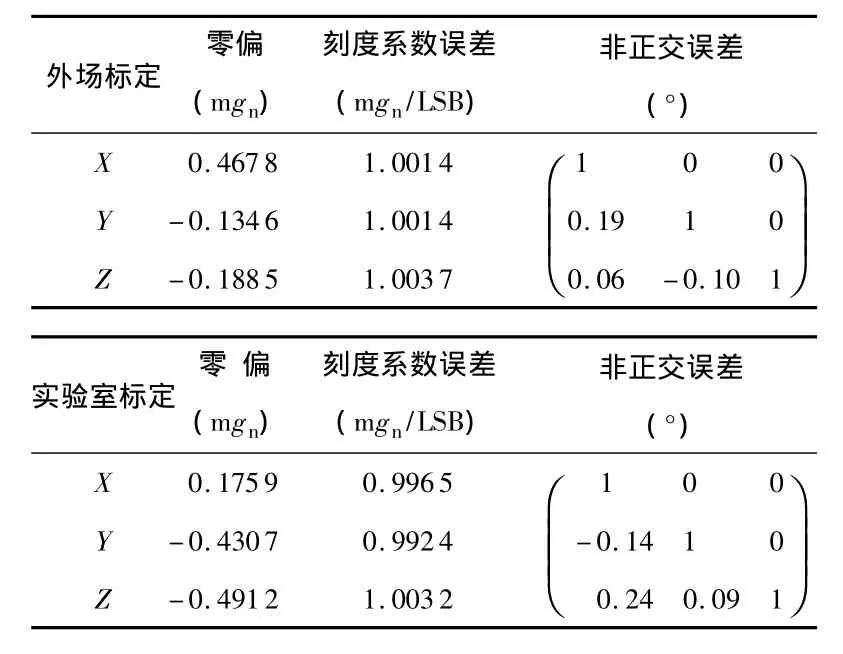
表2 MEMS陀螺儀標定結果Tab 2 Result of calibration for MEMS gyroscope
通過對表1和表2的實驗室標定和外場標定結果對比可以得出,兩者的整體吻合程度較高,其中加速度計零偏外場標定精度優于10 mgn(標稱范圍為±50 mgn),陀螺的零偏外場標定精度優于0.5°/s(標稱范圍為±3°/s),兩者的刻度系數誤差的外場標定一致度達到98%以上,基本滿足了工程應用條件下MEMS慣性器件的外場標定要求。
4 結論
本文所提方法有效地實現了MEMS慣性器件在不具備實驗室條件(轉臺、分度頭等)下的外場標定,實驗步驟簡易可行,對主要的誤差參數實現了較高精度的標定,提高了MEMS慣性器件的標定效率,具有較高的工程實用性和可靠性。
[1]梅春波.基于MEMS慣性器件應急地平儀研究[D].西安:西北工業大學,2011.
[2]Shen S C,Chen C J,Huang H J.A new calibration method for MEMS inertial sensor module[C]//2010 IEEE 11th IEEE International Workshop on Advanced Motion Control,2010:106-111.
[3]Sye Z F,Aggarwal P,Goodall C,et al.A new multi-position calibration method for MEMS inertial navigation systems[J].Measurement Science and Technology,2007,18:1897-1907.
[4]陳寶毅.MEMS慣性器件的數據采集與誤差分析技術研究[D].哈爾濱:哈爾濱工程大學,2009.
[5]Zhang Hongliang,Wu Yuanxin,Wu Wenqi,et al.Improved multipositon calibration for inertial measurement units[J].Measurement Science and Technology,2010,21:1-11.
[6]Gebre-Egziabher D,Elkaim G H,Powell J D,et al.Calibration of strapdown magnetometers in the magnetic field domain[J].ASCE Journal of Aerospace Engineering,2006,19(2):1-16.
[7]Gebre-Egziabher D,Elkaim G H,Powell J D,et al.A non-linear,two-step estimation algorithm for calibration solid-state strapdown magnetometers[C]//8th International Conference on Navigation Systems,St.Peterburg,2011:28-30.
[8]魯鐵定.基于整體最小二乘法的線性回歸建模和解法[J].武漢大學學報:信息科學版,2008,33(5):504-507.
[9]魯鐵定.總體最小二乘的迭代算法[J].武漢大學學報:信息科學版,2010,35(11):1352-1355.
