細長型飛行器雙臺隨機振動試驗虛擬試驗技術研究
2014-12-31 11:57:56王海東李偉明高海慧
上海航天 2014年1期
王 磊,王 飛,王海東,王 君,李偉明,高海慧
(1.上海航天精密機械研究所,上海 201600;2.上海航天技術研究院,上海 201109)
0 引言
細長型飛行器雙臺(雙振動臺)隨機振動試驗可有效解決傳統單臺(單振動臺)振動試驗中懸臂部位過多、振動應力分布集中的問題,能緩解試驗中的過試驗與欠試驗,成為力學環境試驗技術的重大進步和未來的發展趨勢[1]。雙臺隨機振動試驗中控制測點位置、控制方式、振動臺激振位置的選取多通過摸底試驗,以摸索、試探的方式確定。試驗中激振位置調整、安裝方式變換、控制測點與激振位置組合方案的增多,導致通過摸底試驗尋求最優試驗方案的工作量極繁重,而最終試驗結果也難以達到最優。
隨著計算機、數字仿真、結構動力學分析等技術的發展,虛擬振動試驗逐漸成為輔助與指導實際試驗的一種新興技術[2]。通過虛擬振動試驗技術,在正式試驗前對各種不同的控制方式、控制測點位置及激振位置等進行分析與比較,可使試驗人員提前了解各種方案的效果,提前知曉不同試驗方案在試驗過程中試件各部位振動響應。這對避免制定振動試驗中的控制方式、控制測點位置及激振位置等具體方案的盲目性,保證結構試件各部位振動量級和振動頻域響應分布在合理范圍內,降低試驗風險和優化試驗方案,有重要的工程意義。
為此,本文對細長型飛行器雙臺隨機振動試驗虛擬試驗技術進行了研究。
1 雙臺隨機振動試驗原理
雙臺振動試驗系統部件原理如圖1所示。其中:加速度傳感器、電荷放大器、數字控制儀、計算機、功率放大器、振動臺構成一閉環反饋控制系統。試驗過程中閉環控制系統不斷反饋修正,調整兩振動臺輸出的激振力,使試件上控制測點的振動響應與預設的參考譜相等[3]。
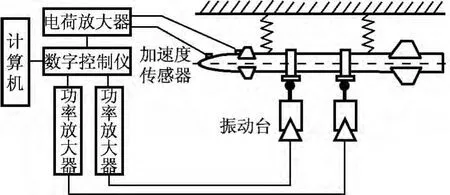
圖1 雙臺隨機振動試驗系統Fig.1 Dual-shaker vibration test system
對雙臺隨機振動試驗,其參考譜為譜密度矩陣,可表示為
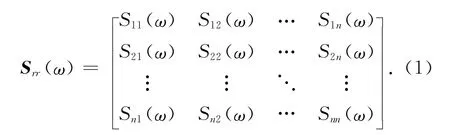
式中:ω為圓頻率;Sij(ω)為控制點i、j間的互功率譜密度函數;Sii(ω)為控制測點i的自功率譜密度函數[4-5]。此處:i=1,2,…,n。對雙臺振動試驗,n=2時控制測點個數等于激振力個數,為方陣控制方式,n>2時控制測點個數大于激振力個數,為長方陣控制。
2 雙臺隨機振動試驗虛擬試驗算法
虛擬振動試驗技術本質為結構動力學有限元仿真,但又與傳統結構動力學仿真有較大區別:傳統動力學有限元仿真解決的問題為根據結構所受的激振力求解結構各部位的振動響應;虛擬振動試驗求解問題的思路為根據結構試件控制測點位置處預設的參考譜密度矩陣,反求振動試驗中試件所受的激振力,再由計算獲得的激振力正求試件各部位的振動響應。對上述這種先逆求再正求問題的求解,目前尚無成熟的商業軟件,須應用Matlab編程平臺自行編寫虛擬振動試驗程序[6]。
虛擬振動試驗程序的算法流程如圖2所示,具體計算步驟如下。
a)計算試件模態參數
模態分析采用Patran有限元仿真軟件與模態試驗結合的方式,并用模型修正技術獲得試件頻率0~2 000Hz的模態頻率、模態陣型、模態阻尼比。
b)計算試件頻響傳遞函數矩陣
用模態疊加法計算試件的激振力與振動位移響應的傳遞函數矩陣

式中:Φ為模態陣型矩陣;Hq(ω)為模態坐標中的力與位移的傳遞函數矩陣,且
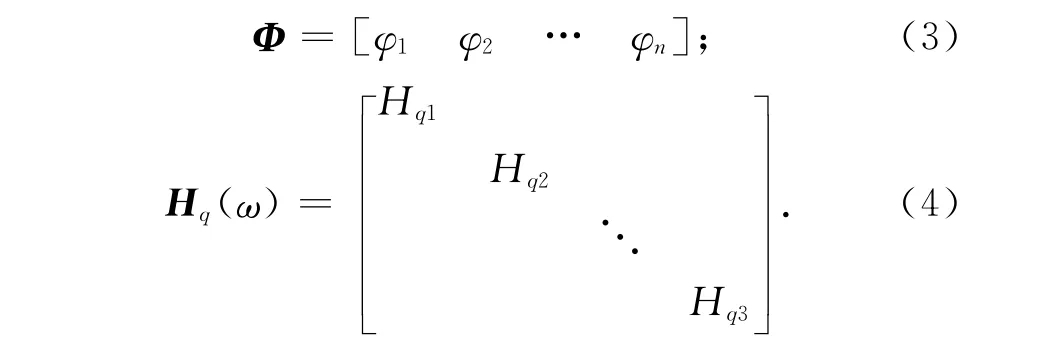
此處:φi為第i階模態陣型;
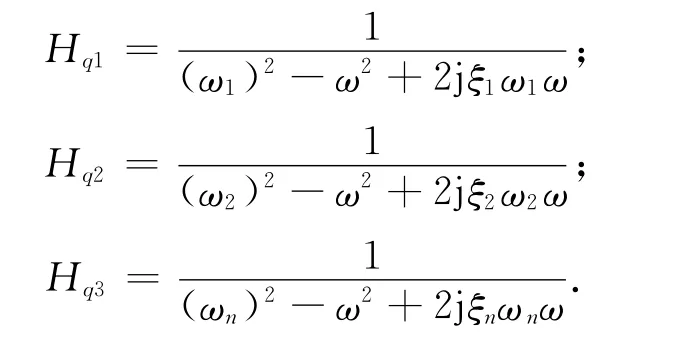
其中:ωi為系統第i階固有圓頻率;ξi為系統第i階模態阻尼;j為虛數單位[7]。則激振力與振動加速度響應的傳遞函數矩陣

c)計算試件所受的激振力
用逆虛擬激勵法求解試件所受的激振力,可保證在不降低計算精度的前提下,顯著減少隨機振動問題的計算量[8-9]。
將參考譜密度矩陣Srr(ω)分解為

式中:ri為第i個列向量;k為Srr(ω)的秩。
根據反演公式,有

式中:(ω)為激振力與控制測點位置處加速度響應的頻響傳遞函數矩陣(ω)的廣義逆矩陣;i=1,2,…,k。則試件所受激振力的譜密度矩陣函數

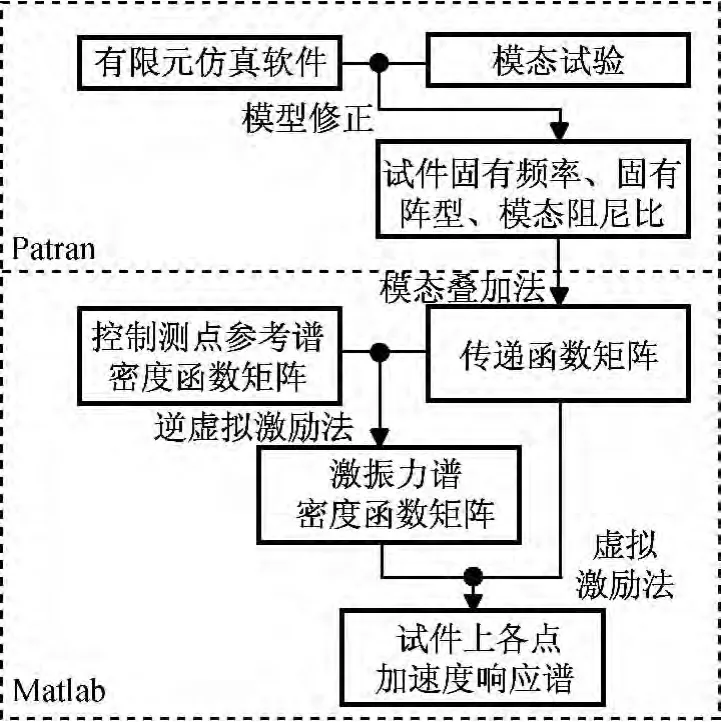
圖2 虛擬振動試驗算法流程Fig.2 Algorithm flowchart of virtual vibration test
d)計算試件各位置處振動加速度響應
用虛擬激勵法計算試件各位置處振動加速度響應

式中:Ha2(ω)為激振力與試件各位置處振動加速度響應的頻響傳遞函數矩陣[8-9]。則試件各點的振動加速度響應

3 細長型飛行器雙臺隨機振動試驗虛擬仿真計算
3.1 模擬件雙臺隨機振動試驗
某細長型飛行器自由飛振動環境試驗要求飛行器頭、尾部振動量級不同,以更真實的模擬其飛行狀態下的振動環境。試驗中飛行器頭、尾部振動譜型如圖3、4所示。
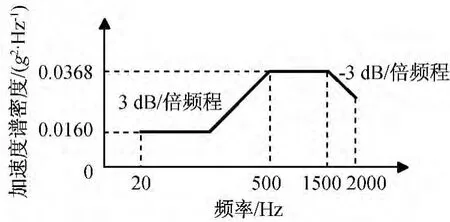
圖3 頭部振動自譜譜型Fig.3 Spectral of nose part
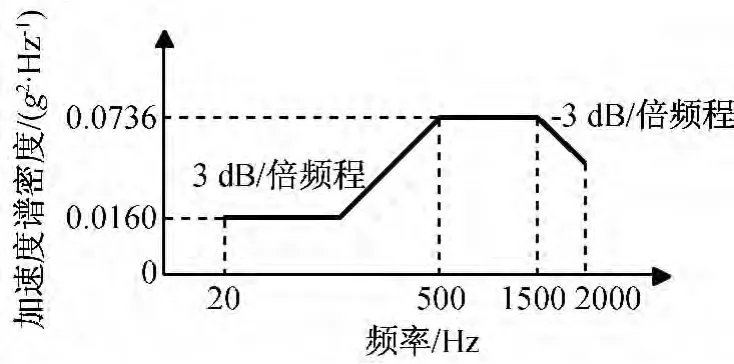
圖4 尾部振動自譜譜型Fig.4 Spectral of tail part
該試驗的最主要目的為檢驗飛行器頭、尾部艙體中電子器件在自由飛振動環境中能否可靠工作,對如圖5所示的第四級艙體動強度的考核并非此次試驗的重點,因此試驗最關心的是飛行器頭、尾部振動加速度響應能否到達試驗要求。為此,試驗初步設計方案為:振動臺對飛行器結構體頭、尾部提供激振力,在其頭、尾部布置控制測點,采用方陣控制方式(控制測點數量為2),頭、尾部分別按圖3、4設置不同的自譜譜型,取控制測點的互譜參數為相干系數0.5,相位差0。
試驗安裝簡圖如圖5所示。試驗時通過橡皮繩將飛行器結構體懸掛于剛性龍門架上,且保持飛行器結構體水平,并保證橡皮繩彈力與試件重力平衡,由此確保振動臺靜態時臺面不受力。試驗中加速度傳感器的粘貼位置如圖5所示,CH1,CH2為控制測點;CH3~CH8為振動監測點。
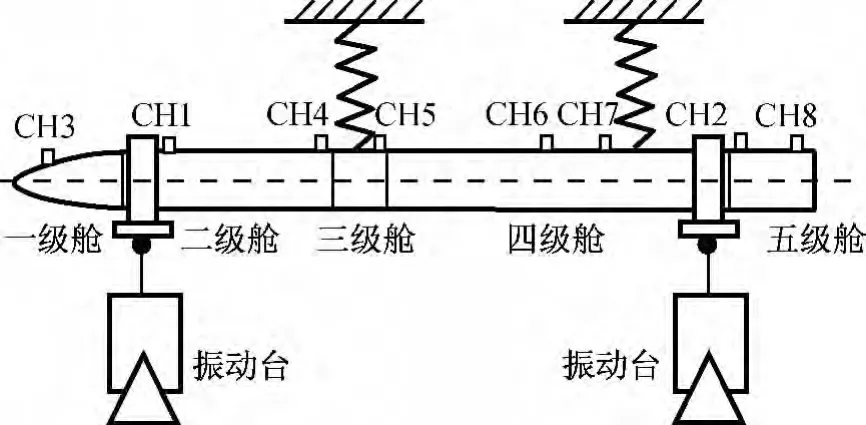
圖5 某細長型飛行器模擬件雙臺隨機振動試驗安裝、測點位置Fig.5 Dual-shaker vibration test of a slender aerocraft modal
3.2 雙臺隨機振動試驗虛擬仿真計算模型建立
根據各艙段外形尺寸、質量結構和剛度分布,建立細長型飛行器的二維有限元模型。將飛行器結構體離散化為若干個集中質量點,質量點質量由艙段殼體和該點附近設備按靜力等效原則確定。質量站間用無質量的彈性梁段連接,其剛度由對應艙段殼體的剛度確定,同一梁段的剛度為常數,并以扭簧單元模擬艙段間的螺釘等緊固件的影響,扭簧單元的扭轉剛度根據模態試驗結果修正確定。
建立細長型飛行器在MSC.Patran有限元分析軟件中的模型,如圖6所示。將細長型飛行器結構體離散為集中質量點35個,其中:節點5為一級艙段末端節點,節點6為二級艙段頭部節點,兩節點空間坐標位置重合并進行多點約束(MPC),約束兩節點的平動自由度始終保持相等,且節點間以扭簧單元連接,以模擬各艙段間緊固件的影響;節點12、13為二級艙和三級艙交界面的節點,節點15、16為三級艙和四級艙交界面的節點,節點31、32為四級艙和五級艙交界面節點。
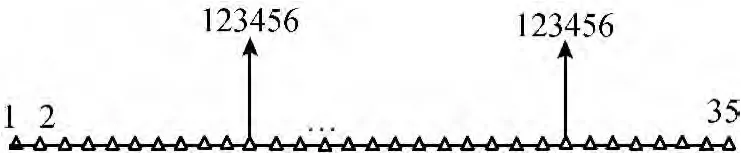
圖6 細長型飛行器的有限元模型Fig.6 Finite element model of the slender aerocraft
振動試驗中加速度傳感器測點位置與飛行器結構體有限元模型中模型節點的對應關系見表1,兩振動臺的激振位置對應有限元模型中的節點6、31。

表1 試件傳感器測點位置與有限元模型節點的對應關系Tab.1 Correlation between measuring points and finite element mode nodes
3.3 仿真計算模擬與試驗結果
編寫Matlab程序,并將該型細長型飛行器的有限元模型數據導入仿真程序算得該種激振位置、控制測點位置、控制方式下飛行器各測點位置處的振動加速度響應。真實振動試驗中各監測點位置處傳感器的測試結果與虛擬振動試驗中對應位置節點的仿真計算結果如圖7~18所示。
雙臺隨機振動試驗各傳感器測點位置處振動加速度均方根(RMS)值如圖19所示。比較試驗值與仿真計算值發現,兩者能較好吻合。圖20所示為虛擬振動試驗仿真程序計算得到的飛行器結構體各位置點處的振動加速度響應RMS值。
4 基于虛擬振動試驗技術的試驗方案優化
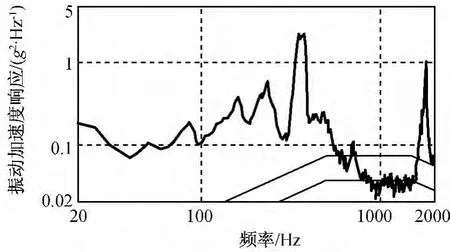
圖7 通道CH3測得的振動加速度響應Fig.7 Vibration response of channel 3
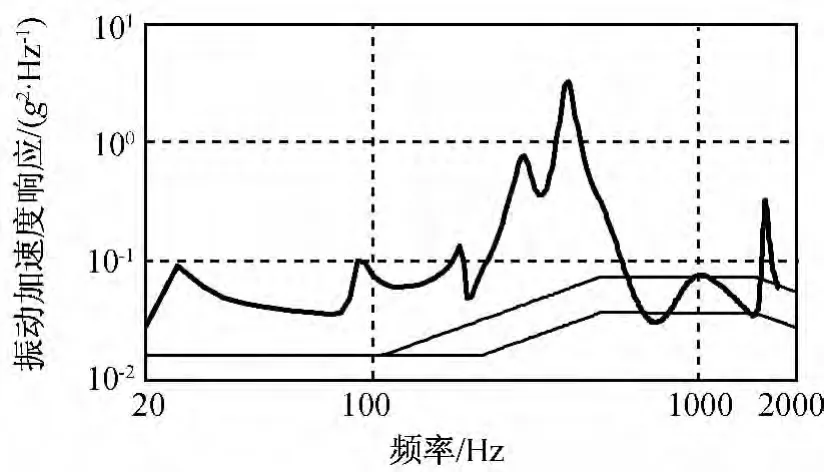
圖8 節點2處的振動加速度響應Fig.8 Vibration response of node 2
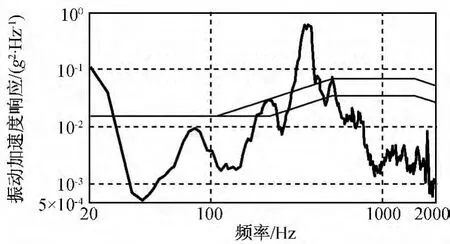
圖9 通道CH4測得的振動加速度響應Fig.9 Vibration response of channel 4
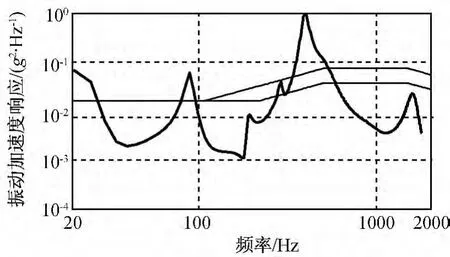
圖10 節點11處振動加速度響應Fig.10 Vibration response of node 11
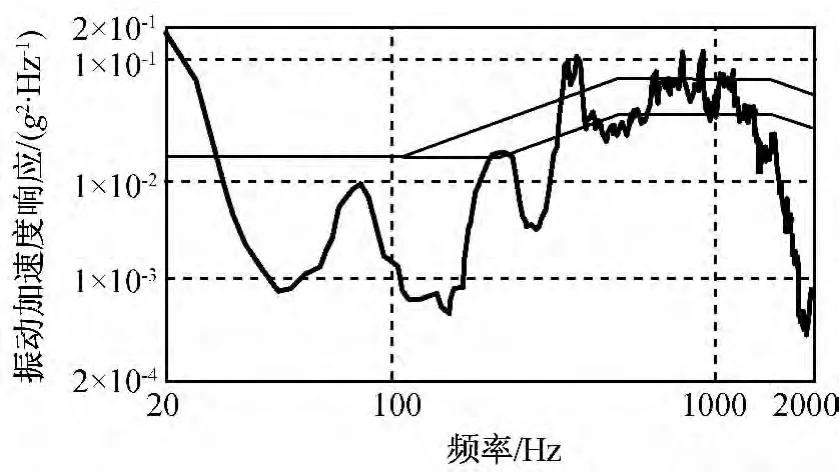
圖11 通道CH5測得的振動加速度響應Fig.11 Vibration response of channel 5
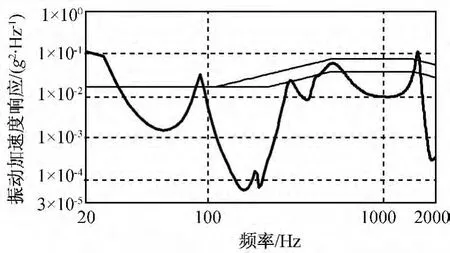
圖12 節點15處振動加速度響應Fig.12 Vibration response of node 15
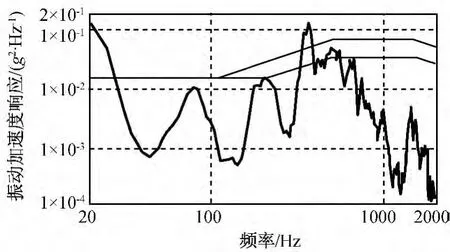
圖13 通道CH6測得的振動加速度響應Fig.13 Vibration response of channel 6
該細長型飛行器雙臺隨機振動試驗方案優化的目標:飛行器第一、二、三級艙體的各部位的振動譜型與圖3更接近,第五級艙體各部位的振動譜型與圖4更接近,使飛行器各艙段電子設備經受各頻段振動應力的充分考核。
本文的虛擬振動試驗優化程序仿照摸底試驗的實施過程,不斷變換試驗控制測點和激振力位置,并對各種組合方案進行數值模擬,從中選出最優的試驗方案。由于一級艙艙壁為脆性材料,且五級艙艙體幾何外形復雜,施加激振力夾具安裝不便,因而激振力位置只能位于二、三、四級艙艙段,即有限元模型中激振力的施加位置為節點6~31,如圖21所示。
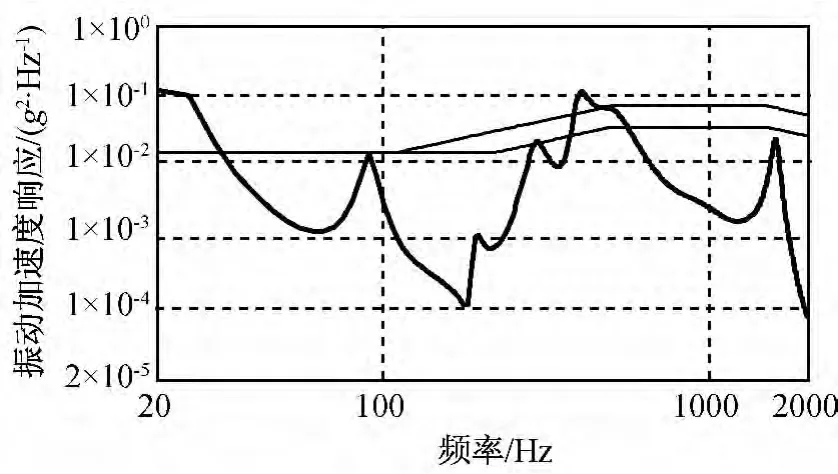
圖14 節點22處振動加速度響應Fig.14 Vibration response of node 22
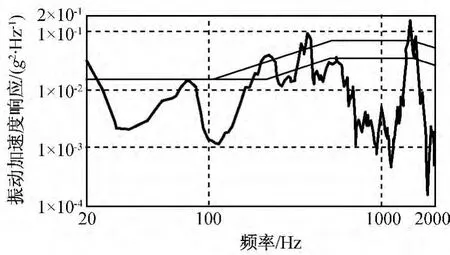
圖15 通道CH7測得的振動加速度響應Fig.15 Vibration response of channel 7
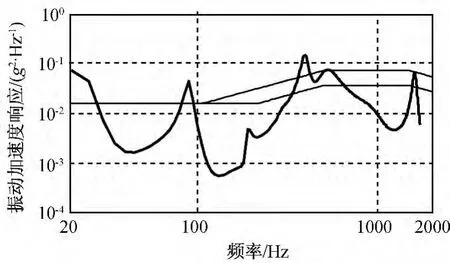
圖16 節點26處振動加速度響應Fig.16 Vibration response of node 26
仿真程序的具體迭代過程:外圍迭代循環,激振力1位置從節點6~18循環,激振力2位置從節點20~31循環;內部嵌套循環,控制測點1在節點位置1~18循環,控制測點2在節點位置19~35循環,并運用循環比較算法,計算得到控制測點和激振力位置的最優組合方案。
虛擬仿真試驗算法程序中,試驗方案優劣評判的依據為試件各敏感部位的振動響應譜型在參考譜±6dB范圍內的帶寬占試驗總頻率帶寬的比例,其計算式如下
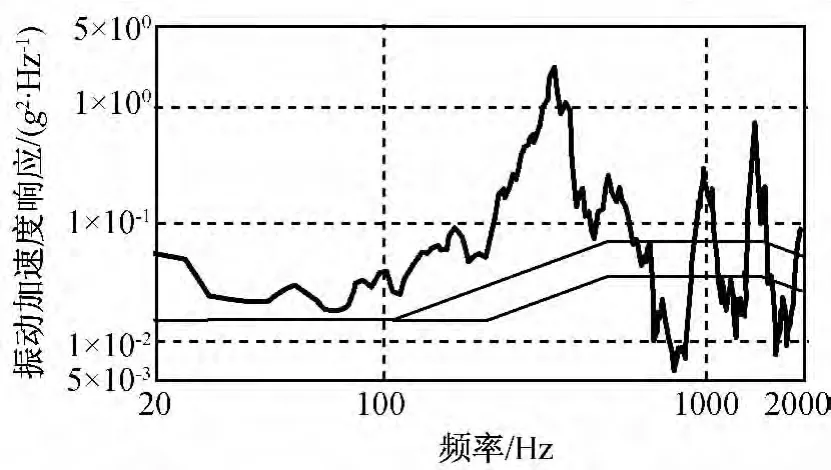
圖17 通道CH8測得的振動加速度響應Fig.17 Vibration response of channel 8
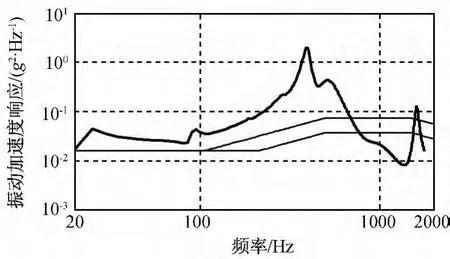
圖18 節點35處振動加速度響應Fig.18 Vibration response of node 35
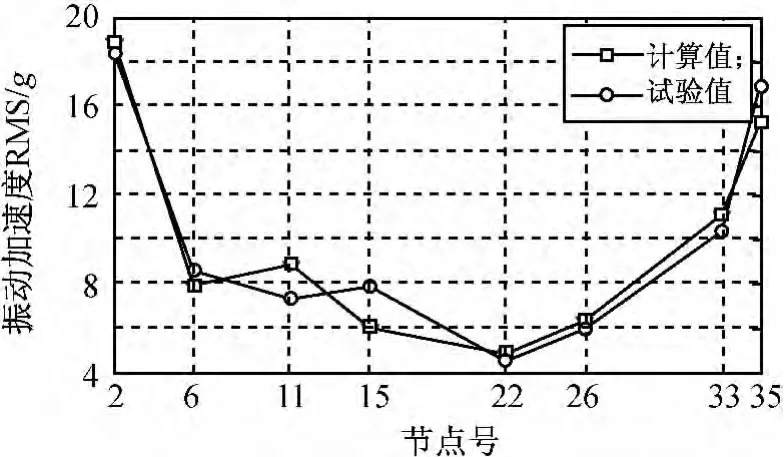
圖19 振動加速度RMS值試驗值與計算值Fig.19 Acceleration RMS of test and simulation
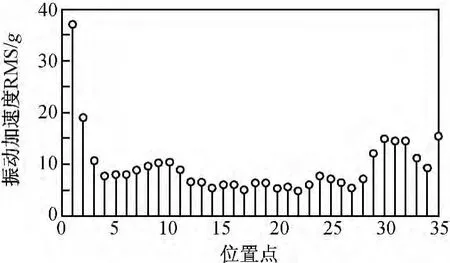
圖20 飛行器各點振動加速度響應RMS值Fig.20 Vibration RMS of every structural part
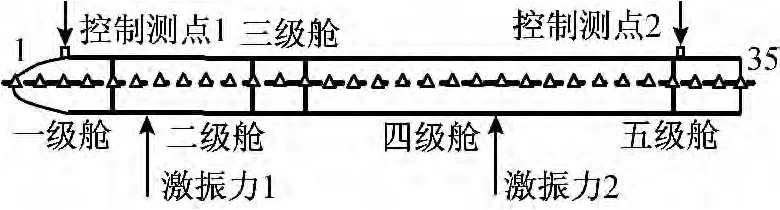
圖21 雙臺振動試驗方案優化Fig.21 Optimizing method of dual-shaker vibration test

式中:Mi為有限元模型節點i的振動加速度響應譜型在參考譜±6dB范圍內的譜線數;N為隨機振動試驗的譜線數(通常隨機振動試驗中譜線數設置為400);η為第一、二、三、五級艙段各節點的振動響應譜型在對應參考譜±6dB范圍內的頻率帶寬占總頻率帶寬比例的平均值。
不同激振位置對應的最優控制測點位置的試驗結果如圖22所示。其X軸為激振力1的位置,Y軸為激振力2的位置,Z軸為某種激振力位置方案對應的最優控制測點位置方案計算得到的η值。

圖22 不同激振位置的最優控制測點試驗結果Fig.22 Optimal test of different test programs
由圖22可知:當X=15,Y=31時,對應的η值最大,則兩激振力位置分別在節點15、31處,兩控制測點位置分別在節點8、32處,飛行器結構體頭尾部艙體各部位的振動譜型與參考譜最接近。所得最優試驗方案如圖23所示。

圖23 最優試驗方案Fig.23 Optimal test program
5 結束語
本文對細長型飛行器雙臺隨機振動試驗的虛擬仿真進行了研究。建立了虛擬仿真程序,獲得了保證試件結構各部位振動響應與參考譜最接近的試驗方案。仿真程序整個循環迭代過程相當于對47 736種控制測點位置、激振位置的組合試驗方案進行分析選優,對這些方案均進行真實摸底試驗,消耗的時間成本、人力成本和物力成本巨大,而最終試驗方案也難以達到最優,但用本文虛擬仿真程序整個運算過程耗時僅需25min,所得試驗方案更優。這種以虛擬振動試驗指導真實試驗方案設計具有重要的工程應用價值。
[1] 高貴福,王 剛,趙保平.細長體復雜結構雙振動臺振動試驗方法標準編制若干問題研究[J].航天器環境工程,2009,26(S1):116-117.
[2] 范伯鈞,劉 煒.虛擬振動環境試驗在導彈研制中的應用[J].現代防御技術,2007,35(6):51-54.
[3] 賀旭東.多輸入多輸出振動試驗控制系統的理論、算法及實現[D].南京:南京航空航天大學,2007.
[4] SMALLWOOD D O.Extreme inputs/outputs for multiple input multiple output linear systems[R].Sandia National Laboratories Report,875611,2005.
[5] SMALLWOOD D O.Generation of time histories with a specified auto spectral density skewness,and Kurtosis[R].Proc of IES,224249DE96007331,1996:304-309.
[6] 林家浩,鐘萬勰.關于虛擬激勵法與結構隨機響應的注記[J].計算力學學報,1998,15(2):219-223.
[7] 朱學旺,劉青林.飛行振動環境隨機試驗模擬的載荷等效[J].航天器環境工程,2006,23(5):257-261.
[8] 智 浩,郭杏林,林家浩.平穩隨機振動荷載識別的逆虛擬激勵法(一)[J].計算力學學報,1998,15(2):127-135.
[9] 智 浩,郭杏林,林家浩.平穩隨機振動荷載識別的逆虛擬激勵法(二)[J].計算力學學報,1998,15(4):395-400.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:44