基于路徑規(guī)劃和輸入成型的撓性航天器振動控制方法
2014-12-31 11:48:24劉德慶彭仁軍張子龍
上海航天 2014年4期
劉德慶,彭仁軍,張子龍
(上海航天控制技術(shù)研究所,上海 200233)
0 引言
為增加成像幅寬,對突發(fā)事件地區(qū)實現(xiàn)即時觀測,或通過衛(wèi)星沿軌跡方向前視和后視實現(xiàn)立體成像,這對衛(wèi)星的快速機動能力提出了嚴格要求[1]。航天器姿態(tài)機動方法分為開環(huán)和閉環(huán)機動。開環(huán)機動對模型的確定性要求高,僅用于單軸機動;閉環(huán)機動分為階躍指令和路徑規(guī)劃模式,階躍指令模式有超調(diào),路徑規(guī)劃模式則可避免超調(diào),且機動過程平緩可靠。最常規(guī)的機動路徑為基于bang-bang控制的時間最優(yōu)路徑(BCB路徑),但跟蹤BCB路徑易激起撓性附件大幅度振動,影響穩(wěn)定時間[2]。
撓性振動抑制對航天器的高精度高穩(wěn)定度控制十分重要,尤其對要求姿態(tài)敏捷機動的中小慣量撓性衛(wèi)星,姿態(tài)機動中激起的撓性振動延長了穩(wěn)定時間,甚至引發(fā)故障。目前航天器撓性處理皆采用頻率隔離減少撓性對控制器控制作用的影響,未對撓性作抑制處理。當前,對航天器的穩(wěn)定度和快速性要求高,須對航天器的撓性進行抑制處理。航天器撓性抑制研究基于智能材料、智能結(jié)構(gòu)進行振動主動控制。文獻[3]采用壓電智能元件粘貼于懸臂梁;文獻[4]基于壓電元件制動器設(shè)計滑模變結(jié)構(gòu)控制器作主動抑振,但基于智能材料抑振法對帆板振動的測量噪聲大,精度低,代價高,不適于在軌實現(xiàn)。輸入成型法為一種前饋控制法,是指由脈沖序列(輸入成型器)與一定的期望輸入相卷積,所形成的指令作為系統(tǒng)的輸入并控制系統(tǒng)運動。輸入成型技術(shù)可有效消除或衰減系統(tǒng)殘留振動,甚至在系統(tǒng)響應(yīng)盡可能快時減小系統(tǒng)的超調(diào)量[5-8]。為此,本文研究了一種角余弦過渡的角加速度路徑規(guī)劃法,用輸入成型技術(shù)對其進行優(yōu)化。
1 問題提出
令I(lǐng)為慣性坐標系,b為航天器本體坐標系,d為航天器目標坐標系。如無說明,本文涉及的矢量均在b系中。
設(shè)ω為b系相對I系的角速度;ωd為d系相對I系的角速度,則d系相對b系的誤差角速度ωe=ωd-ω。相應(yīng)地,令q為b系相對I系的姿態(tài)四元數(shù),qd為d系相對I系的姿態(tài)四元數(shù),則d系相對b系的姿態(tài)四元數(shù)qe=q-1×qd。
考慮撓性附件相對航天器本體固定情形,其受空間干擾和撓性振動影響的衛(wèi)星動力學模型表示為

四元數(shù)運動學模型

基于路徑規(guī)劃和輸入成型的撓性航天器姿態(tài)控制描述:規(guī)劃合適的指令路徑,經(jīng)輸入成型后加入姿態(tài)控制系統(tǒng)中作為動坐標系d的運動姿態(tài),使依據(jù)數(shù)學模型式(1)~(3)構(gòu)造的控制規(guī)律u實現(xiàn)b系跟蹤d系并抑制撓性振動,亦即t→∞時有qev→0,ωe→0,η→0。
2 路徑規(guī)劃與輸入成型
考慮工程執(zhí)行機構(gòu)輸出和測量裝置的量程限制,航天器大角度機動的理想路徑是執(zhí)行機構(gòu)輸出最大力矩加速,達到航天器最大角速度勻速,一段時間后以最大力矩實現(xiàn)減速。因受航天器撓性附件振動影響,直接跟蹤以上理想路徑易激起撓性附件振動,影響穩(wěn)定度和快速性。為抑制撓性附件振動,減少穩(wěn)定時間,提高姿態(tài)穩(wěn)定度,先使用余弦過渡加速度路徑,再應(yīng)用輸入成型技術(shù)對路徑進行優(yōu)化。
2.1 余弦過渡加速度路徑

圖1 余弦過渡加速度路徑Fig.1 Cosine transition acceleration path
具體規(guī)劃步驟:

b)按工程實際選取τ。
c)依據(jù)執(zhí)行機構(gòu)輸出力矩大小和航天器慣量大小選取a。
d)根據(jù)測速裝置的量程限制確定勻速段角速度大小ωy,進而確定T=ωy/a-τ。
f)由步驟a)將歐拉軸e的方向矢量分配到b系三軸上可得規(guī)劃的角加速度路徑ad。
g)對角加速度矢量路徑積分可得ωd;解算運動學方程式(2)可得航天器相對目標姿態(tài)的qd。
2.2 多模態(tài)輸入成型器
式(1)的第二式帆板撓性振動方程針對每個模態(tài)和阻尼分別設(shè)計成型器,串聯(lián)作為抑制多模態(tài)成型器。
考慮工程實際中撓性模態(tài)參數(shù)的不確定性,無需在標稱頻率點嚴格抑制為零,只要將振動抑制在某一容許的范圍即可。獨立模態(tài)采用文獻[10]的雙峰EI輸入成型器脈沖序列為

式中:
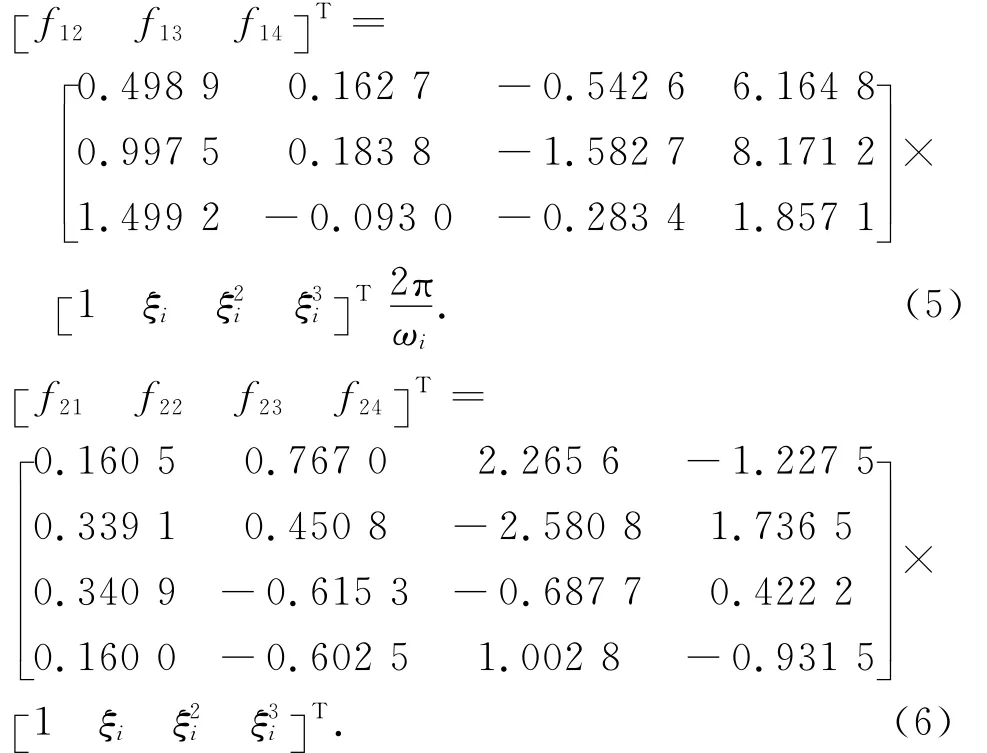
式中:ωi為i階撓性模態(tài)頻率;ξi為附件i階撓性模態(tài)阻尼比;F中第一行為脈沖作用時刻,第二行為對應(yīng)脈沖作用時刻幅值。
對考慮n階模態(tài)的撓性附件的航天器,其多模態(tài)雙峰EI輸入成型器的脈沖序列為

將規(guī)劃的余弦過渡加速度路徑得到的ωd,qd,ad與成型器的脈沖序列相卷積作為目標坐標系d系的運動狀態(tài)。
3 跟蹤滑模控制器設(shè)計
滑模控制系統(tǒng)滑動模態(tài)運動的穩(wěn)定性,完全取決于滑動模態(tài)的設(shè)計,因此只要保證滑動模態(tài)方程的穩(wěn)定性,該階段的運動一定是穩(wěn)定的。一般的滑模控制,系統(tǒng)初始時刻不在滑模面上,需要設(shè)計控制律驅(qū)使系統(tǒng)狀態(tài)從初始點進入滑動模態(tài)。對跟蹤規(guī)劃軌跡的機動方法,初始姿態(tài)與規(guī)劃路徑的起點誤差為零,以誤差信息構(gòu)造的滑模控制系統(tǒng)初始點在滑模面上,跳過了進入滑模面的過程,只需控制系統(tǒng)狀態(tài)在滑模面上運動,就可跟蹤規(guī)劃軌跡,實現(xiàn)姿態(tài)機動。

設(shè)計Terminal滑模面

式中:K為常值對角陣。



故控制器是漸進穩(wěn)定的。
為減少不連續(xù)符號函數(shù)sgn(σ)引起的抖動,用變參數(shù)切換函數(shù)

替代sgnσ[11]。此處:δ為誤差e1,e2的函數(shù);δ0,δ1為正的常數(shù)。

最終得到控制器

4 仿真
用Matlab/Simulink軟件對撓性航天器姿態(tài)機動方法仿真驗證。取撓性航天器相關(guān)參數(shù)為
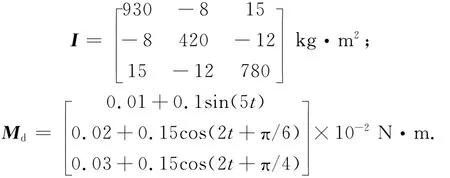
撓性附件考慮帆板的前四階撓性模態(tài),其振動頻率矩陣和阻尼比矩陣分別為

耦合系數(shù)矩陣為
對姿態(tài)機動控制,目標姿態(tài)相對參考坐標系是固定的,以目標姿態(tài)的本體系為參考坐標系,直接給出初始姿態(tài)相對目標姿態(tài)的初始值信息為

路徑規(guī)劃采用參數(shù)為a=0.005 4rad/s2,ωy=0.034 9rad/s,τ= 1s。 控 制 器 參 數(shù) 為K=diag[1.9 1.7 2.3],δ0=0.001,δ1=0.045,D=5。
采用控制器(13)跟蹤雙峰EI輸入成型優(yōu)化后的余弦過渡加速度路徑,仿真結(jié)果如圖2~5所示,達到0.000 5(°)/s穩(wěn)定度所用時間為50.69s,實現(xiàn)了機動控制且抑制帆板撓性振動。
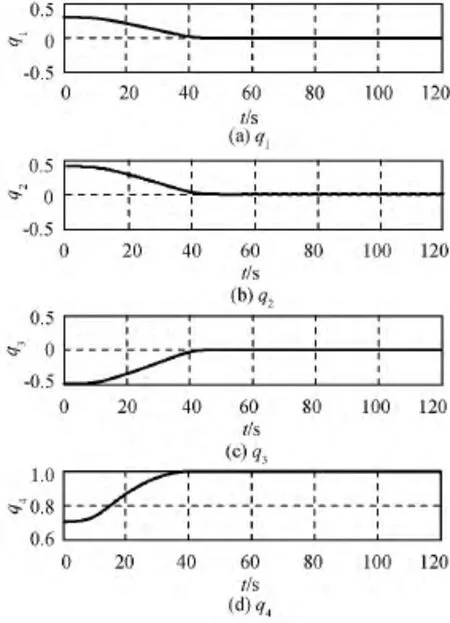
圖2 相對目標姿態(tài)四元數(shù)Fig.2 Relative quaternion to object attitude
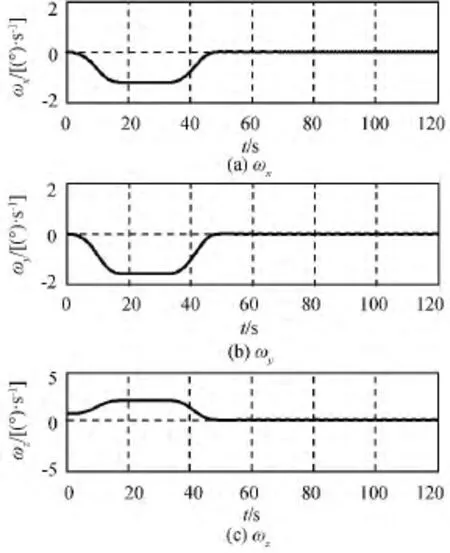
圖3 姿態(tài)角速度Fig.3 Attitude angle velocity
對跟蹤指令軌跡的機動方法,機動過程分為跟蹤段和穩(wěn)定段。跟蹤段是指令軌跡未達到目標值,指令驅(qū)動姿態(tài)機動的階段;穩(wěn)定段是指令軌跡不再運動后直至航天器達到相應(yīng)穩(wěn)定度的穩(wěn)定控制階段。采用跟蹤指令軌跡的航天器姿態(tài)機動穩(wěn)定時間包括跟蹤段和穩(wěn)定段時間。具較大撓性的航天器穩(wěn)定段時間的減少取決于撓性附件振動的抑制情況,抑振目的是實現(xiàn)姿態(tài)機動進入穩(wěn)定段后撓性附件作用于航天器本體的殘余耦合力矩小。
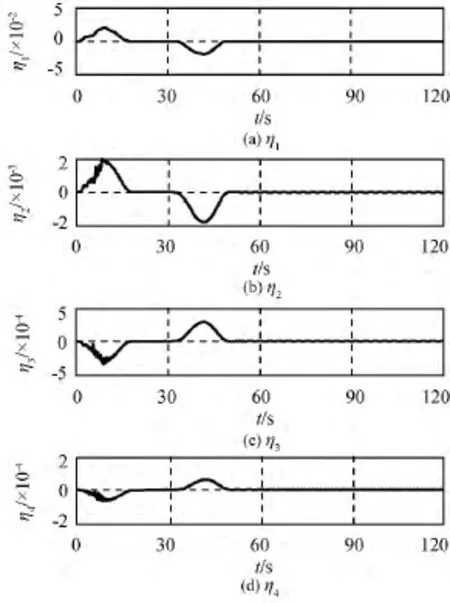
圖4 帆板撓性模態(tài)Fig.4 Flexibility mode of sail board
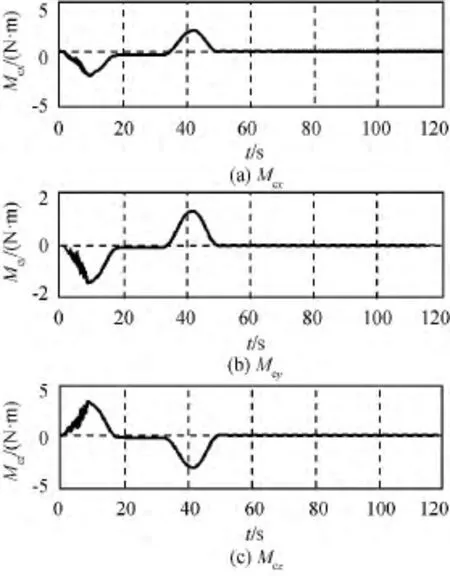
圖5 指令力矩Fig 5 Control moment
對撓性耦合不大的航天器姿態(tài)機動,不使用輸入成型,而是延長余弦過渡加速度路徑的過渡過程,抑振效果較好。為說明余弦過渡加速度路徑抑制撓性振動的有效性,將其與跟蹤BCB路徑的機動方案進行比較。
比較以下三種方案:BCB,規(guī)劃BCB路徑,用控制器式(13)跟蹤;CTA,規(guī)劃余弦過渡加速度路徑(τ=5),用控制器式(13)跟蹤;CTA+IS,規(guī)劃余弦過渡加速度路徑(τ=1),采用輸入成型器式(7)進行優(yōu)化,用控制器式(13)跟蹤。三種方案在50s后進入穩(wěn)定段,仿真所得穩(wěn)定段50~80s的帆板撓性模態(tài)坐標、殘余耦合力矩、指令力矩及整個機動過程的指令力矩如圖6~9所示。

圖6 帆板模態(tài)坐標(50~80s)Fig.6 Flexibility mode at 50~80s
對三種方案仿真結(jié)果中撓性相關(guān)的各項指標進行數(shù)據(jù)分析,見表1,其中3σ=2×10-5(°)/s。
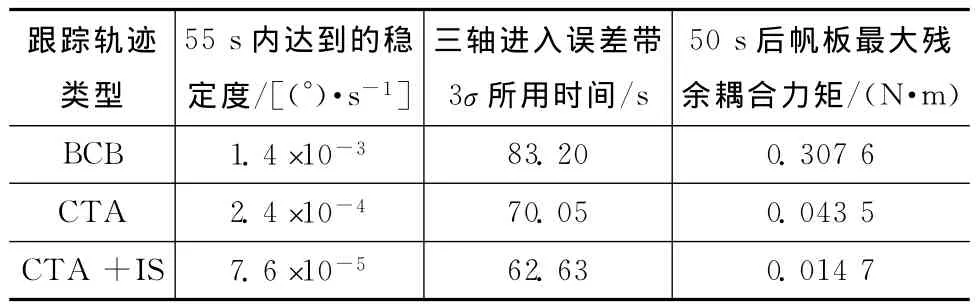
表1 三種方案仿真結(jié)果Tab.1 Simulation results of three mtehods

圖7 帆板殘余耦合力矩(50~80s)Fig.7 Residual coupling moment at 50~80s

圖8 指令力矩(50~80s)Fig.8 Control moment at 50~80s
機動50s后進入穩(wěn)定段控制過程,CTA,CTA+IS方案的撓性模態(tài)較BCB方案顯著減小,對本體幾乎無殘余耦合力矩,因采用CTA路徑使跟蹤機動后帆板對本體的殘余耦合力矩較小,跟蹤CTA路徑較BCB路徑50s后最大殘余耦合力矩小一個量級,跟蹤輸入成型器優(yōu)化的CTA路徑殘余力矩再有一定減少。BCB方案在41s進入穩(wěn)定段控制,至83.2s實現(xiàn)2×10-5(°)/s的穩(wěn)定度,穩(wěn)定段時間長,相反,CTA,CTA+IS方案對帆板撓性振動有抑制作用,穩(wěn)定段時間較短。

圖9 指令力矩對照Fig.9 Comparison of control moment
5 結(jié)束語
本文通過對常規(guī)BCB路徑的改進,提出了余弦過渡加速度路徑,撓性耦合較大時還可輸入成型技術(shù)對其優(yōu)化。使用跟蹤滑模變結(jié)構(gòu)控制器仿真分析,并與跟蹤BCB路徑方案對比,以跟蹤經(jīng)輸入成型技術(shù)優(yōu)化的余弦過渡加速度路徑方案對撓性附件振動抑制效果明顯,穩(wěn)定時間短。
[1] 楊保華.航天器制導(dǎo)、導(dǎo)航與控制[M].北京:中國科學技術(shù)出版社,2010.
[2] 鄭立君,郭 毓,賴愛芳,等.撓性航天器大角度姿態(tài)機動路徑規(guī)劃[J].華中科技大學學報(自然科學版),2011,39(S2):232-235.
[3] 胡慶雷,馬廣富.改進型正位置反饋_變結(jié)構(gòu)衛(wèi)星姿態(tài)主動控制[J].振動工程學報,2007,20(4):324-330.
[4] 周連文,周 軍,李位華.撓性航天器姿態(tài)機動的主動振動控制[J].火力與指揮控制,2006,31(6):31-34.
[5] SINGER N C,SEERING W P.Pre-shaping command inputs to reduce system vibration[J].Journal of Dynamic Systems,Measurement,and Control,1990,112(1):76-82.
[6] PARMAN S,KOGUCHI H.Controlling the attitude maneuvers of flexible spacecraft by using time-optimal/fuel-efficient shaped inputs[J].Journal of Sound and Vibration,1999,221(4):545-565.
[7] HU Qing-lei.Input shaping and variable structure control for simultaneous precision positioning vibration reduction of flexible spacecraft with saturation compensation[J].Journal of Sound and Vibration,2008,68(3):18-53.
[8] 原勁鵬,楊 旭,楊 滌.輸入成型在衛(wèi)星噴氣姿態(tài)機動控制中的應(yīng)用[J].南京:東南大學學報(自然科學版),2005,11(35Ⅱ):137-142.
[9] 雷擁軍,談樹萍,劉一武.一種航天器姿態(tài)快速機動及穩(wěn)定控制方法[J].中國空間科學技術(shù),2010,30(5):43-53+58.
[10] SINGHOSE W E,PORTER L J,SINGER N C.Vibration reduction using multi-h(huán)ump extra-insensitive input shapers[C]//Control System Society:Proceedings of the American Control Conference.Seattle:[s.n.],1995:3830-3834.
[11] 胡劍波,莊開宇.高級變結(jié)構(gòu)控制器理論及應(yīng)用[M].西安:西北工業(yè)大學出版社,2008:78-79.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
