近地軌道編隊飛行衛星構形保持控制方法研究
2014-12-31 11:56:26劉付成杜耀珂鄭科宇
上海航天 2014年4期
劉付成,完 備,杜耀珂,鄭科宇
(1.哈爾濱工業大學 航天學院,黑龍江 哈爾濱 150001;2.上海航天控制技術研究所,上海 200233)
0 引言
多顆衛星通過編隊飛行協同工作,可達到甚至超過一顆大型衛星的功能,且其可靠性、靈活性和經濟性等具有一定的優勢,故衛星的編隊飛行已成為航天領域的研究熱點,目前已有 GRACE,Tan-DEM,PRISMA等多項編隊飛行任務在軌運行[1-3]。由于軌道攝動的影響,衛星編隊不可避免會涉及編隊構形控制。根據描述編隊衛星相對運動方式,衛星編隊控制分為基于相對位置速度的和基于相對軌道根數的兩類。由于相對軌道根數能直觀描述編隊衛星間的幾何關系及相對運動狀態,同時便于進行單星絕對軌控與編隊控制的一體化設計,因而更具應用前景。根據調整軌道根數,基于相對軌道根數的編隊控制又可分為軌道面外根數控制和軌道面內根數控制。軌道面外的軌道根數控制通過垂直軌道面的單次脈沖即可實現,而軌道面內根數控制方法主要采 用 多 脈 沖 控 制[4-7]。TanDEM,PRISMA 任務針對自身任務特點采用兩脈沖控制,但該控制方法只能調整相對半長軸與相對偏心率矢量,不能滿足通常編隊控制任務中相對半長軸、相對偏心率矢量和相對緯度幅角聯合控制的需求[4、7]。文獻[5]提出徑向脈沖與航向脈沖結合的多脈沖控制,并與傳統五脈沖控制進行了比較,但徑向控制的缺點是控制效率低、燃料消耗多,且控制策略較復雜、對推力器安裝要求多,燃料消耗非最優,不利于星上實現。文獻[6]將編隊控制問題轉為交會問題,提出了一種航向三脈沖編隊控制算法,但該算法未對控制過程中相對軌道根數間耦合作用和觸發時刻與控制時刻不一致等誤差因素進行補償,控制精度有限。本文針對編隊保持控制問題,用相對軌道根數描述方式,通過分析并補償控制過程中相對軌道根數耦合影響,優化設計了一種三脈沖編隊構形保持控制方法,并在更趨近于工程實際的誤差條件下進行仿真驗證。
1 編隊飛行運動學
為描述輔星相對于主星的運動,定義相對軌道根數
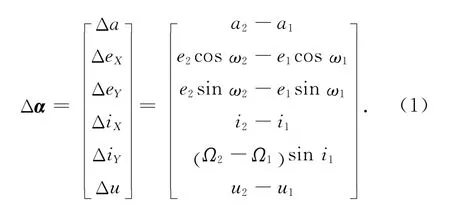
式中:a為軌道半長軸;e為軌道偏心率;ω為軌道近地點幅角;i為軌道傾角;Ω為升交點赤經;u為軌道緯度幅角;下標“1”、“2”分別表示主、輔星[7-8]。式(1)可進一步定義為
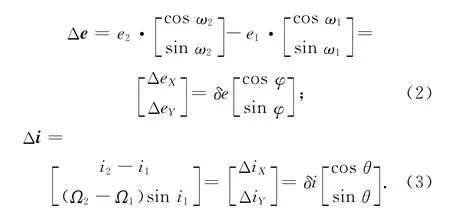
式中:δe,φ分別為 Δe的大小和相位;δi,θ分別為 Δi的大小和相位。
令r1,r2分別為主星、輔星在編隊坐標系中的位置矢量[8]。輔星相對主星的相對運動可用編隊坐標系中輔星與主星的相對位置Δr=r2-r1描述,則Δr可表示為

在編隊坐標系中,相對位置與相對軌道根數間存在對應關系,文獻[4]給出其轉換公式為
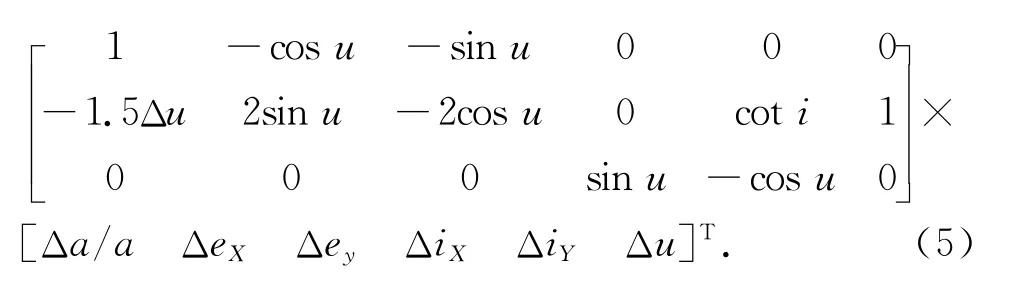
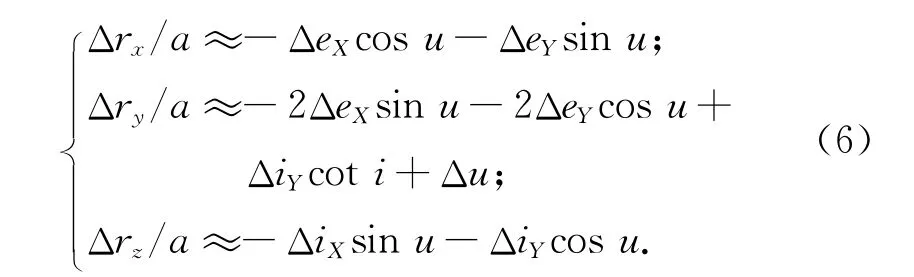
考慮Δa相對a為小量,式(5)可作近似,以分量形式展開可得
令P=aδe,L=a(ΔiYcoti+Δu),S=aδi,由三角合角公式可得
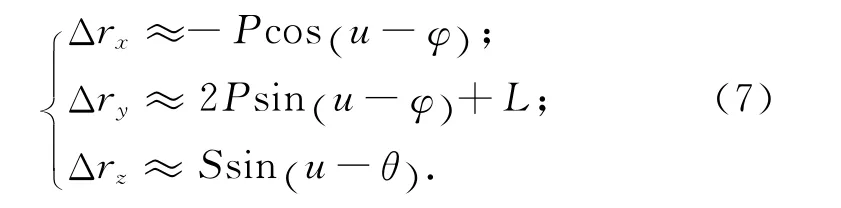
式(7)表明編隊衛星間的相對運動可分解為垂直軌道面的簡諧運動和在軌道面內的橢圓運動。P表示輔星相對主星運動軌跡在編隊坐標系XOY面內投影橢圓的短半軸;S表示輔星相對主星運動軌跡在編隊坐標系OZ向的振幅;L表示主星相對編隊構形幾何中心在編隊坐標系OY向的偏移量,如圖1、2所示。

圖1 編隊構形在XOY平面內的投影Fig.1 Projection of formation configuration inXOYplane
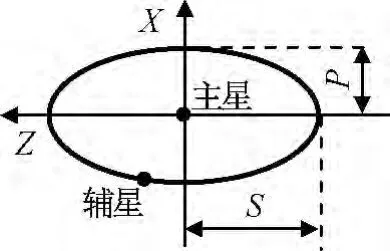
圖2 編隊構形在XOZ平面內的投影Fig.2 Projection of formation configuration inXOZplane
2 編隊保持控制
編隊構形取決于兩顆衛星的相對軌道根數,編隊構形控制最終變成對編隊衛星的相對軌道根數調整。由文獻[4]的編隊構形攝動分析可知,編隊構形保持控制主要是調整平面內相對軌道根數。
因徑向控制效率低,燃料消耗多,編隊保持控制采用沿航跡向控制方式。
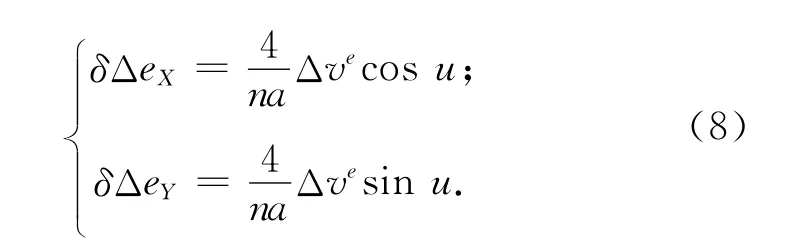
a)調整δΔe
當單獨調整δΔe矢量而不改變δΔa時,可采取兩次航向脈沖控制,噴氣時刻為u,u+π,兩次噴氣量相同,噴氣方向相反。單次對應速度增量為Δve,有

b)調整δΔa
當單獨調整相對長半軸δΔa而不改變δΔe時,可通過兩次航向脈沖控制。兩次噴氣的時刻分別為u,u+π,兩次噴氣量相同,噴氣方向相同。單次噴氣對應速度增量為Δva,則有

c)改變δΔu
當需要立改變δΔu時,同樣可利用兩次航向脈沖控制實現。兩次噴氣分別在u,u+2π,兩次噴氣量相同,噴氣方向相同。單次噴氣對應速度增量為Δvu,有

由上述分析,可得結論:
a)相對半長軸、相對偏心率矢量以及相對緯度幅角的聯合調整可通過三次相位間隔180°的航向脈沖控制實現。第一次噴氣是在緯度幅角u1=arctan(δΔeY/δΔeX)的時刻,噴氣量產生的航向速度增量為Δv1=Δve+Δva+Δvu;第二次噴氣是在緯度幅角u2=arctan(δΔeY/δΔeX)+π的時刻,噴氣量產生的切向速度增量為Δv2=-Δve+Δva;第三次噴氣是在緯度幅角u3=arctan(δΔeY/δΔeX)+2π的時刻,噴氣量產生的切向速度增量為Δv3=-Δvu。

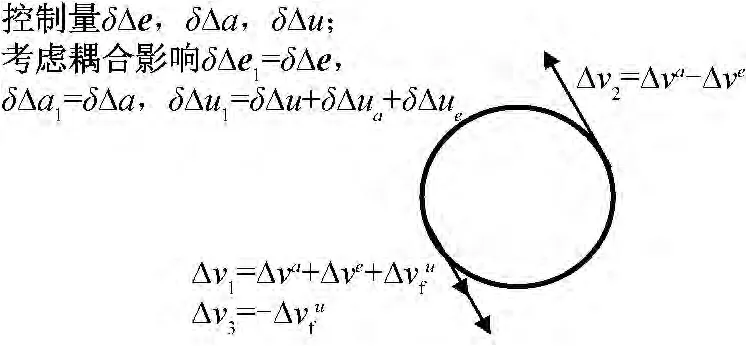
圖3 編隊保持控制過程Fig.3 Control process of formation-keeping control
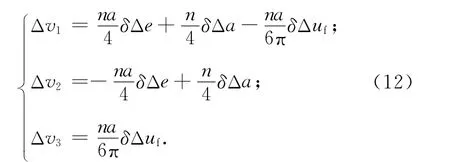
設相對軌道根數調整量為δΔa,δΔe,δΔu,因編隊控制過程相對軌道根數間耦合影響,需對δΔu控制量作補償

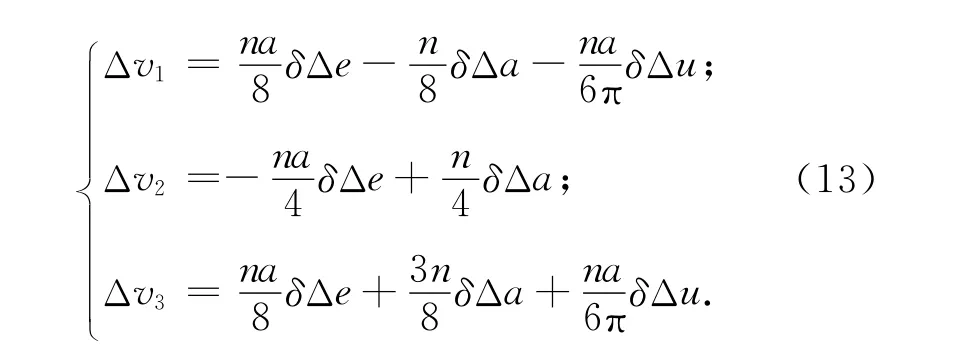
式中:δΔuf為最終調整量。由此可得3脈沖編隊控制方程為
將式(11)代入式(12)中,可得
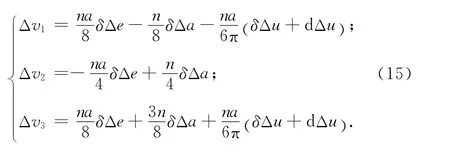
實際上,編隊控制觸發時刻與編隊控制時刻往往不一致,故還需對δΔu控制量進行修正。記觸發時刻對應的緯度幅角為u0,則到達第一次控制時刻u1引起航跡方向漂移對應的相對緯度幅角變化量

將式(14)代入式(13),可得
3 仿真
借鑒TanDEM任務中定周期控制方式(即間隔固定圈次進行編隊保持控制),采用粗控加精控的方式,設計控制策略如圖4所示。對編隊保持控制間隔周期影響最大的是編隊衛星沿航跡向的漂移和Δe旋轉,這主要是由軌道攝動、編隊控制殘差等導致的。
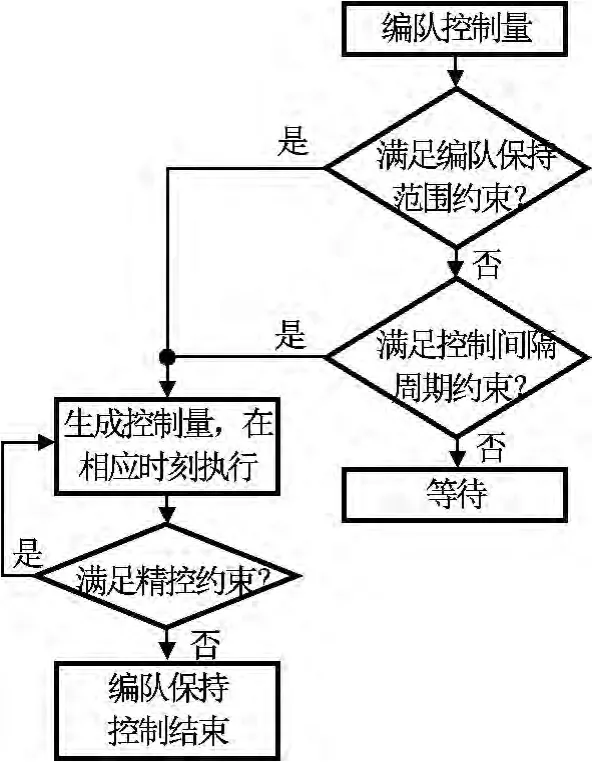
圖4 編隊保持控制策略Fig.4 Control strategy of formation-keeping control
設主星運行于軌道高度520km的近地近圓太陽同步軌道。編隊構形采用等半長軸和等傾角的設計,標稱編隊構形參數為P=334m,S=1 950m,φ=82°,θ=90°,L=0m;編隊控制間隔周期6d;編隊保持控制仿真16d,其間完成2組編隊保持控制。仿真過程中考慮的誤差有:
a)相對導航引起的編隊構形參數確定誤差ΔP=2m(3σ),ΔL=4.2m(3σ),Δa=0.05m(3σ),Δφ,Δθ=0.5°(3σ);
b)編隊推力效率誤差3%~5%,推力偏斜(含姿態控制誤差引起的推力偏斜)3°;
c)控制時間誤差,噴氣時長及噴氣時刻均為1ms的整數倍。
假定編隊控制方式采用星地大回路,考慮我國的測控條件,設置精控與粗控間相隔5圈,使編隊控制在可見圈次完成,保證編隊衛星的安全。編隊構形保持控制過程見表1。
由表1可知:編隊控制的粗控一般是在某一固定u附近完成。這是因為編隊構形在攝動影響下編隊控制調整量往往滿足a|δΔe|>|δΔa|,故編隊控制u由arctan(δΔeY/δΔeX)確定。在當前軌道高度條件下,Δe在軌道攝動作用下進行旋轉,約3.49(°)/d,當采用固定間隔周期(如6d)控制時,編隊控制u的理論值為161.536 6°,與仿真值非常相近。仿真值與理論值的偏差主要由相對導航誤差、上次編隊保持控制的殘差,以及緯度幅角計算誤差等因素引起。整個編隊保持控制仿真過程中編隊控制參數變化如圖5~8所示。編隊保持仿真中的控制精度為:|ΔP|優于5m,|ΔS|優于5m,|Δφ|優于1.5°,|ΔL|優于7m。
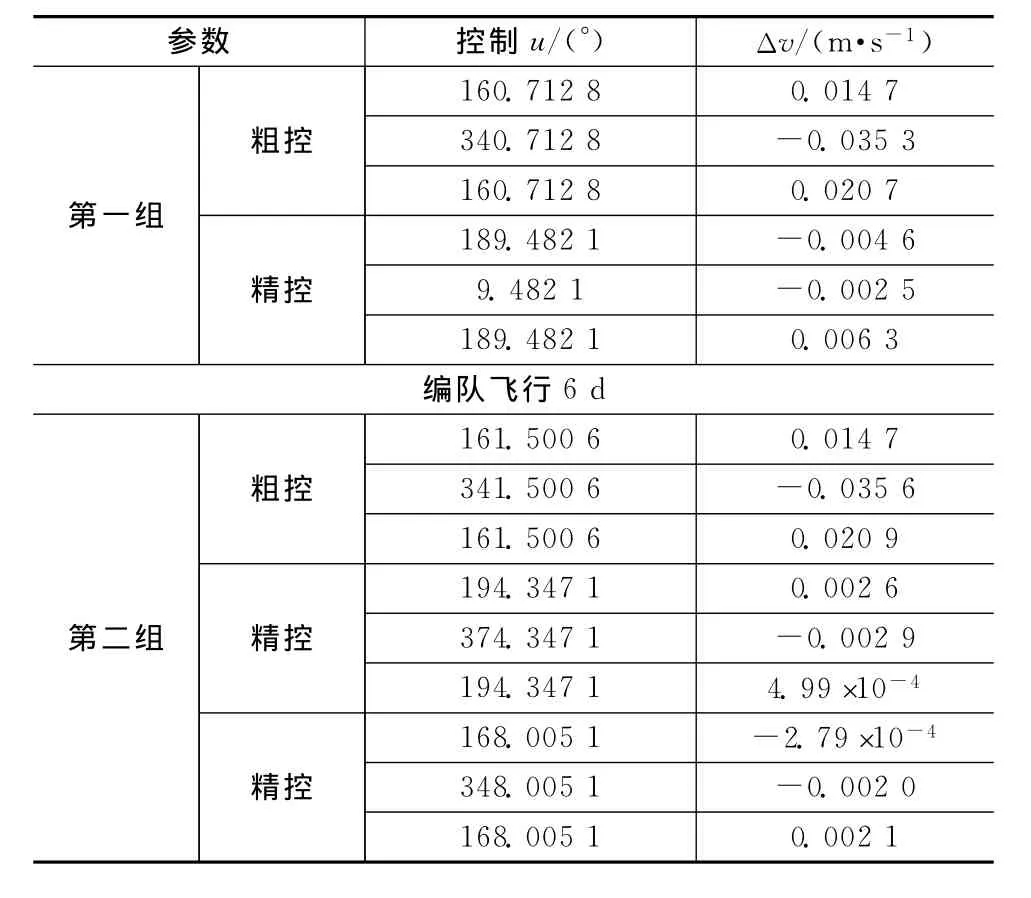
表1 編隊構形保持控制過程Tab.1 Process of formation-keeping control
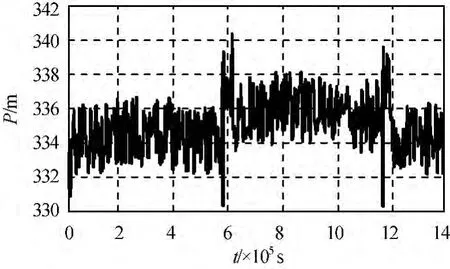
圖5 編隊構形參數PFig.5 Formation configuration parameterP
由于相對導航誤差、推力器效率、偏斜和星上計時精度等誤差影響,編隊保持控制只能將構形參數控制到標稱值附近,仍存在一定的偏差,即控制殘差。因此,提高編隊保持控制精度不僅需控制方法本身保證,更要求從消除上述誤差著手。
4 結論
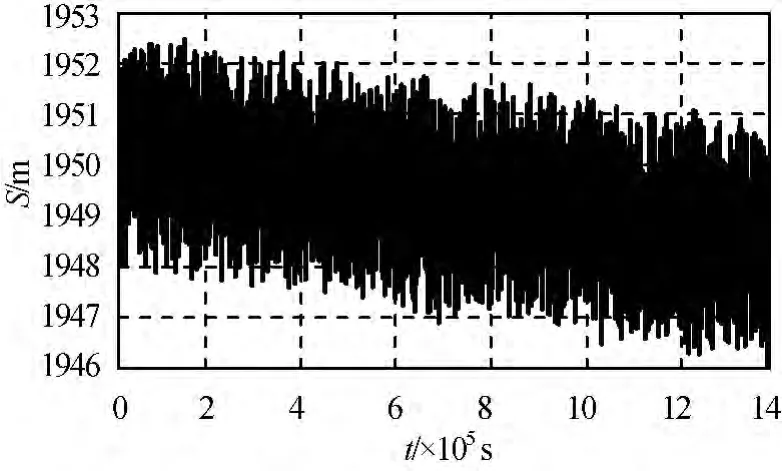
圖6 編隊構形參數SFig.6 Formation configuration parameterS
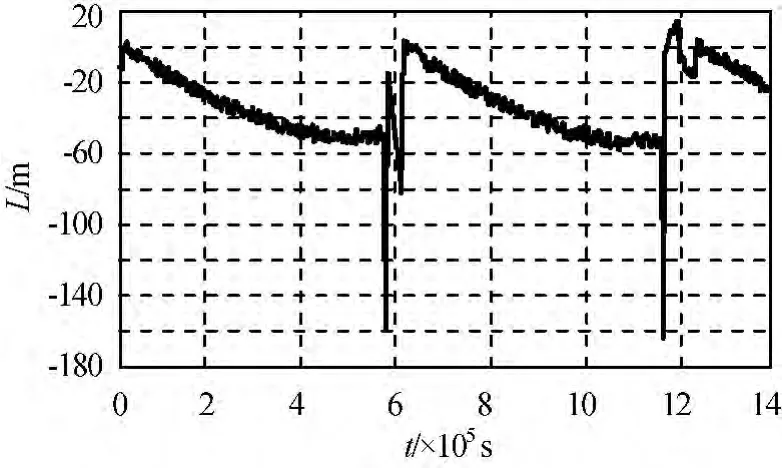
圖7 編隊構形參數LFig.7 Formation configuration parameterL
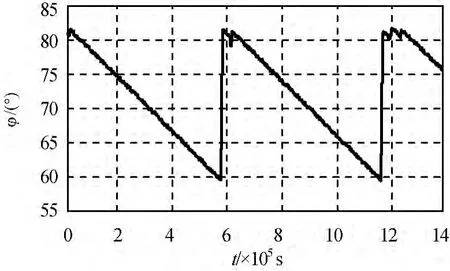
圖8 編隊構形參數φFig.8 Formation configuration parameterφ
本文對近地軌道編隊飛行衛星構形保持控制方法進行了研究。根據分析和仿真,可得結論:與四脈沖、五脈沖編隊控制相比,三脈沖控制因僅采用航跡向控制方式,具有控制效率高與節省燃料的優點;該法通過對編隊控制過程中相對軌道根數耦合影響以及觸發時刻與控制時刻不一致等誤差因素的影響進行補償,其控制精度高于其他的三脈沖控制;該方法求解過程簡單,物理意義明確,控制量完全由編隊構形參數變化量決定,能完成編隊保持控制任務,同時也可用于編隊初始化及編隊重構過程中軌道面內相對軌道根數的調整;仿真過程中考慮相對導航誤差、推力器誤差、推力器偏斜和星上計時精度約束等誤差因素,仿真驗證更充分,更貼近工程實際。
[1] KIRSCHNER M, MONTENBRUCHK O,BETTADPUR S.Flight dynamics aspects of the grace formation flying[C]//2ndInternational Workshop on Satellite Constellations and Formation Flying.Haifa:Technion—Israel Institute of Technology,2001:187-194.
[2] KRIEGER G,MOREIRA A,FIEDLER H,etal.TanDEM-X:a satellite formation for high-resolution SAR interferometry[J].Journal of IEEE Transactions on Geoscience and Remote Sensing,2007,45(11):317-3341.
[3] EBERHARD G,SIMONE D A,OLIVER M.Autonomous formation flying for the PRISMA mission[J].Journal of Spacecraft and Rockets,2007,44(3):671-681.
[4] SIMONE D A,OLIVER M.Proximity operations of formation-flying spacecraft using an eccentricity/inclination vector separation[J].Journal of Guidance,Navigation,and Control,2006,29(3):554-563.
[5] 賀東雷,曹喜濱,馬 俊,等.基于相對偏心率/傾角矢量的編隊控制方法[J].系統工程與電子技術,2011,33(4):833-837.
[6] 胡 敏,曾國強,姚 紅.基于相對軌道根數的衛星編隊重構控制研究[J].裝備指揮技術學院,2010,21(1):74-77.
[7] SIMONE D A,ARDAENS J S,LARSSON R.Spaceborne autonomous formation-flying experiment on the PRISMA mission[J].Journal of Guidance,Control,and Dynamics,2012,35(3):834-850.
[8] 杜耀珂,陽 光,王文妍.InSAR衛星的編隊構形的e/i矢量設計方法[J].上海航天,2011,28(5):8-13.
