基于LabVIEW和PIDNN的汽車巡航控制系統(tǒng)設(shè)計(jì)
2014-12-25 08:30:04錢菲仇成群
機(jī)械工程師 2014年11期
錢菲, 仇成群
(鹽城師范學(xué)院物理科學(xué)與電子技術(shù)學(xué)院,江蘇鹽城224051)
QIAN Fei,QIU Chengqun
(College of Physics and Electron,Yancheng Teachers University,Yancheng224051,China)
0 引言
因國(guó)內(nèi)汽車設(shè)計(jì)制造技術(shù)相對(duì)落后,對(duì)汽車巡航控制系統(tǒng)(Cruise Control System,縮寫(xiě)為CCS)的研究還不夠成熟,巡航控制精度和穩(wěn)定性都不高[1-3]。
1 PIDNN控制的巡航控制系統(tǒng)
1.1 PID控制在汽車巡航控制中的運(yùn)用
當(dāng)啟動(dòng)巡航系統(tǒng)時(shí),車速傳感器接受信息,通過(guò)數(shù)據(jù)采集,將信息傳送給行車電腦電子控制單元(ECU)處理,調(diào)節(jié)發(fā)動(dòng)機(jī)節(jié)氣門開(kāi)度,控制動(dòng)力輸出,經(jīng)動(dòng)軸傳遞給車輪,再經(jīng)差速器將車速反饋回ECU[3-5]。PID控制是比例-積分-微分控制,該控制是據(jù)汽車設(shè)定行駛與實(shí)際行駛車速之間的偏差,考慮各種狀況,進(jìn)而實(shí)現(xiàn)系統(tǒng)的不變參數(shù)的巡航控制。被控對(duì)象的特性復(fù)雜時(shí),常規(guī)PID很難實(shí)現(xiàn)有效控制[2-5]。
1.2 PIDNN控制系統(tǒng)的設(shè)計(jì)
PIDNN(Proportional Integral Derivative Neural Network),是一種多層前向神經(jīng)元網(wǎng)絡(luò)。結(jié)合巡航控制系統(tǒng)的原理以及PIDNN的特點(diǎn),文中選用PIDNN控制的巡航系統(tǒng)使車速保持恒定,輸入為巡航汽車的設(shè)定車速與實(shí)際車速的偏差值,巡航開(kāi)始控制后,則啟動(dòng)制動(dòng)控制模塊,輸出制動(dòng)力矩,調(diào)節(jié)節(jié)氣門開(kāi)度。PIDNN控制巡航控制系統(tǒng)框圖如圖1所示。

圖1 PIDNN巡航控制系統(tǒng)框圖
2 PIDNN控制的巡航控制系統(tǒng)
2.1 LabVIEW簡(jiǎn)介
LabVIEW(Laboratory Virtual Instrument Engineering)由美國(guó)NI公司開(kāi)發(fā)設(shè)計(jì)出品,是一種圖形化的編程語(yǔ)言[2]。
2.2 基于LabVIEW和PIDNN的巡航控制系統(tǒng)
依據(jù)比例-積分-微分控制的基本原理,經(jīng)過(guò)綜合比較,文中巡航控制算法選用PIDNN 的 反 傳 算 法[5]。按照PIDNN控制算法,在LabVIEW中分別編寫(xiě)模塊,PIDNN控制算法流程圖如圖2所示。設(shè)計(jì)的初始化模塊是確定神經(jīng)元網(wǎng)絡(luò)控制系統(tǒng)的輸入-輸出變量個(gè)數(shù),并構(gòu)建PIDNN控制系統(tǒng)。輸入層至隱含層積分單元的權(quán)重值應(yīng)滿足(r,y)→e的無(wú)畸變性,其中v為設(shè)定車速值,r表示實(shí)際車速值,y表示巡航車速值。前向算法模塊是根據(jù)系統(tǒng)給定值r和被控對(duì)象輸出值y,計(jì)算出網(wǎng)絡(luò)隱含層和輸出層各值。隱含層的輸出函數(shù)分為比例、積分、微分函數(shù)。進(jìn)而在LabVIEW中建立PIDNN控制的巡航控制系統(tǒng)。
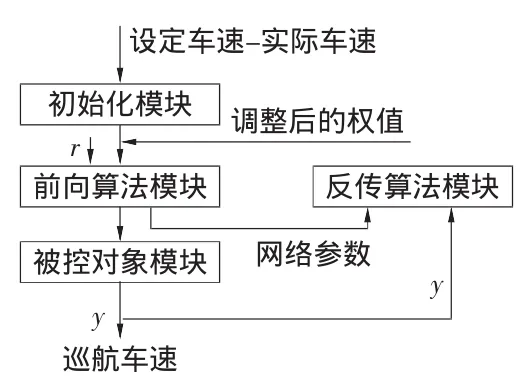
圖2 PIDNN控制算法流程圖
3 算法仿真與系統(tǒng)試驗(yàn)
根據(jù)牛頓第二運(yùn)動(dòng)定律[3],汽車的運(yùn)動(dòng)方程表達(dá)式為

式中:Fa為加速阻力,N;Fe為驅(qū)動(dòng)力,N;Ff為滾動(dòng)阻力,N;Fw為空氣阻力,N;Fh為坡度阻力,N;m 為汽車質(zhì)量,kg;a為加速度,m/s2;δ為計(jì)入旋轉(zhuǎn)質(zhì)量慣性力偶矩后的汽車質(zhì)量轉(zhuǎn)換系數(shù)。
Fw表達(dá)式為

Ff表達(dá)式為

Fh表達(dá)式為

式中:x為汽車水平位移,m;v為汽車行駛速度,km/h;t為汽車行駛時(shí)間,h。取汽車質(zhì)量m=1500 kg,取δ=1.1。由以上公式和文獻(xiàn)[3]計(jì)算得出汽車的動(dòng)力系統(tǒng)方程,在LabVIEW環(huán)境下,建立動(dòng)力系統(tǒng)模型,建立PIDNN控制系統(tǒng)模型,而后再將動(dòng)力系統(tǒng)模型和PIDNN控制系統(tǒng)模型通過(guò)運(yùn)算后得到巡航控制系統(tǒng)模型。首先建立PID巡航控制仿真系統(tǒng),設(shè)定汽車巡航車速為60 km/h,通過(guò)在線調(diào)整PID參數(shù) Kc=5.00,Ti=0.008,Td=0.001,輸入巡航設(shè)定車速為60 km/h,巡航車速為60 km/h時(shí)PID巡航系統(tǒng)仿真圖如圖3所示。當(dāng)PID控制車速在接近110 s時(shí),出現(xiàn)超調(diào)量并在130 s出現(xiàn)最大超調(diào)量,并于350 s時(shí)車速趨于穩(wěn)定,PID輸出為11.78,達(dá)到巡航車速為59.8588 km/h,超調(diào)量為0.1412 km/h。
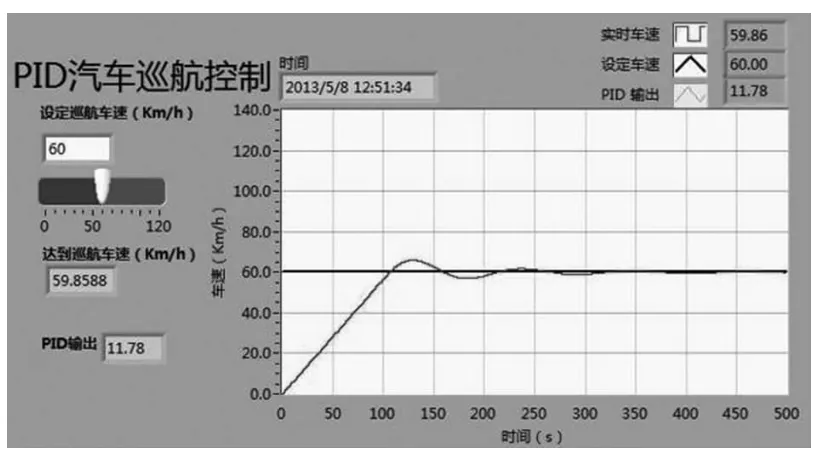
圖3 巡航車速為60 km/h時(shí)PID巡航系統(tǒng)仿真圖
然后建立PIDNN巡航控制仿真系統(tǒng),進(jìn)行基于PIDNN控制的巡航控制仿真測(cè)試,得到巡航車速為60 km/h時(shí)PIDNN控制系統(tǒng)仿真圖,仿真結(jié)果得出基于PID控制的巡航控制系統(tǒng)的巡航速度穩(wěn)定時(shí)間和誤差多于基于PIDNN控制系統(tǒng)值。再在PIDNN巡航控制仿真系統(tǒng)中設(shè)定汽車巡航車速為80、100、120km/h時(shí),都可以得出:當(dāng)采用基于LabVIEW和PIDNN控制時(shí),系統(tǒng)的巡航控制超調(diào)量減小,而響應(yīng)速度則加快,巡航系統(tǒng)的控制穩(wěn)定性良好。
4 結(jié)語(yǔ)
文中設(shè)計(jì)的巡航控制系統(tǒng),能夠改善控制系統(tǒng)的控制品質(zhì),巡航控制系統(tǒng)超調(diào)量小,系統(tǒng)的穩(wěn)定時(shí)間快,具有較好的推廣價(jià)值。
[1] 陳漢玉,左承基,袁銀男,等.輕度混合動(dòng)力汽車運(yùn)行模式控制[J].農(nóng)業(yè)工程學(xué)報(bào),2011,27(10):61-67.
[2] Deppen T O,Alleyne A G,Stelson K A,et al.Optimal energy use in a light weight hydraulic hybrid passenger vehicle[J].Journal of Dynamic Systems,Measurement and Control,2012,134(4):41009-41011.
[3] 余志生.汽車?yán)碚摚跰].北京:機(jī)械工業(yè)出版社,2012.
[4] 余成波,張連,胡曉清.自動(dòng)控制原理[M].北京:清華大學(xué)出版社,2009.
[5] Chen Hanyu,Zuo Chengji,Yuan Yinnan,et al.Operating mode control research of mild hybrid electric vehicle[J].Transactions of the CSAE,2011,27(10):61-67.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37