三視場紅外熱像儀鬼影現象分析
2014-12-25 01:48:26楊勇
設備管理與維修 2014年9期
關鍵詞:故障
楊 勇
(中國航天空氣動力技術研究院 北京)
一、引言
某型具有三視場切換能力的紅外熱像組件在大視場對準均勻場景或者環境能量低的情況下,圖像上有微弱光環呈現。切換至中視場與小視場時,沒有此現象。經過查詢相關資料得知,此現象被稱為鬼影現象,一般情況下紅外圖像的自適應非均勻性校正可能存在此類缺陷。
二、紅外鬼影現象
紅外熱像儀作為偵察型無人機的標準配置傳感器之一,能夠對地面景物實時成像并支持亮度、對比度、極性變換等在線調整。出現故障的紅外熱像組件在大視場對準均勻場景情況下,圖像上有微弱光環呈現,如圖1所示。
經過查詢相關資料,發現此種故障被稱為紅外鬼影現象,極少出現,且出現的原因不盡相同。為給故障排查提供條件,記錄故障發生時,當地氣候條件為地面溫度約23℃,大氣濕度約80%。
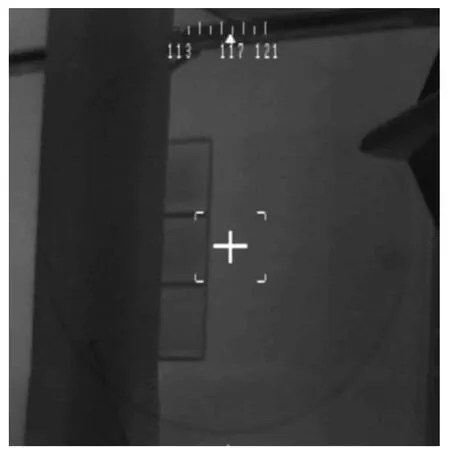
圖1 紅外熱像儀鬼影現象
三、故障排除與定位
針對此紅外熱像儀 鬼影現象問題,設計人員復查設計文件與加工圖紙、質檢人員核對各零件存檔數據、檢測報告及出貨時的系統記錄數據。從反饋的數據及復查結果來看沒有發現異常,排除粗大誤差的可能性。于是圍繞此問題建立故障排查樹,分析可能出現此現象的原因如圖2所示。
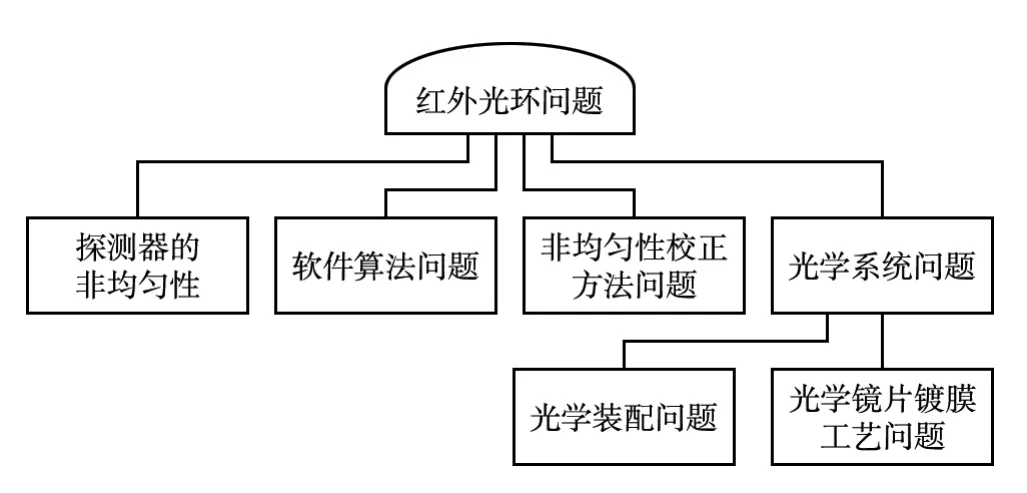
圖2 故障排查樹
1.探測器的非均勻性
通過查找該探測器的出廠報告,發現探測器的非均勻性狀態良好。而裝探測器之前,如有質量問題不會轉入系統裝配階段。在同一探測器的情況下,系統只有大視場有此現象,小視場與中視場沒有出現,可排除探測器硬件出差錯,推斷探測器的非均勻性穩定。
2.軟件算法問題
此紅外熱像儀軟件采用定型的標準程序版本,將該主板上的程序原樣移植到廠家其他相同硬件平臺熱像儀中運行良好,圖像中無鬼影現象,同時該設備的軟件算法在其他平臺項目中都廣泛運用,運行狀態良好,且在同一算法平臺下,系統只有大視場有此現象,小視場與中視場沒有出現,可排除算法上帶來的圖像異常問題。
3.熱像儀非均勻性校正的方法問題
軟件中熱像儀數據校正的方法可表達為式(1)和式(2)。

式中 Y16——校正后的數據
K——非均勻性系數
X——探測器A/D轉換后的值
*B——對快門補償后的值
ΔB——對快門校正的值與在鏡頭前對均勻物體補償值的差值
ΔB數據中包含光學系統的冷反射圖像。在成像時算法直接減去ΔB數據圖像,使得圖像均勻,如圖3所示。因此,可排除非均勻性校正方法的原因,最大可能為光學系統問題。
四、故障機理
從熱像儀非均勻性校正的方法問題的推論可知,可能為外界帶來的ΔB能量變化所致。從順序光路上分析,像面上沒有其他物體成像,排除其可能性。因而,能量的變化為外部雜散輻射能量到達像面。現分為兩分面論證,一方面是光學裝配問題;另一方面是光學鏡片鍍膜工藝問題。
從裝配角度來看,光學系統圖紙與質檢數據沒有異常與超標的記錄。另外,光學是個精密儀器。如果裝配出現誤差,圖像不會清晰。再有,如果是裝配中某個物體直接成像,理應在中視場與小視場也會出現,因而排除其可能性。
從目前鍍膜檢測方法來看,幾乎所有廠家都是通過檢測陪鍍片來判斷透過率是否達標。從圖像上來看,異常圖像能量低,而且對外界場景能量低時比較明顯。推想應不是直接到達像面,而是通過某個面反射到達像面。因而,懷疑此組件的鏡片透過率不達標。現在假定鏡片透過率低,建立多次反射模型分析。追跡發現第一鏡片第一面反射率低時,像面上圖像有能量聚集。仿真光照強度分布截圖如圖4所示,圖 4中 Y片(Current Y Slice) 縱 坐標為mm,橫坐標為 W/mm2,X 片 (CurrentX Slice)縱坐標為W/mm2,橫坐標為mm。
外界雜散輻射通過第一面反射到像面成像,其強度沒有規律,因而當設備所在環境發生變化時,與熱像儀非均勻性校正方法分析的情況相吻合。因此,問題可定位為第一鏡片的透過率低,外界的輻射通過反射到達了像面。在不同環境下第一面反射的能量差值有變化,而ΔB的數據還是原來環境下的數據,紅外出現圖像異常。
圖3 重新驗證非均勻性校正方法后的圖像
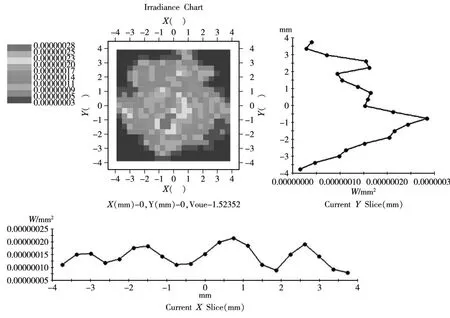
圖4 通過第一面能量反射試驗仿真圖
五、維修措施
通過以上分析,因探測器非均勻性漂移,導致之前采集的數據不再適應當前的非均勻性校正。因此,只要開機實時采集ΔB數據,即可解決問題。即給紅外熱像儀加電后,在探測器制冷時對準某個設定好的位置。在此位置時,紅外窗口所對準的均勻物體要求其距離必須<60 mm(越小越好)。只要對準的目標在紅外圖像上沒有明顯的反光或者圖像輪廓,即可認為是均勻物體。同時,為徹底杜絕再次發生,將第一鏡片重新拋光鍍膜,確保其透過率,從而減少第一鏡片的反射能量,使得圖像上沒有異常。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
