基于Simulink 的某越野車整車起步加速性能仿真
2014-12-24 08:56:22詹雋青黎云兵朱先民
軍事交通學院學報 2014年7期
詹雋青,黎云兵,朱先民
(1.軍事交通學院 國家應急交通運輸裝備工程技術研究中心,天津300161;2.軍事交通學院 研究生管理大隊,天津300161)
動力性是車輛最基本的性能,而起步加速過程中的加速時間,又是動力性的重要指標[1-2]。應用Simulink 建立整車動力傳動系統模型,可以很好地對整車運行進行仿真。本文在試驗基礎之上,以某液力傳動車輛為研究對象,根據其整車動力傳動系統中各個部件的工作原理和試驗數據,建立模塊化、參數化動態仿真模型。使用該模型仿真車輛在限定油門開度起步加速過程中,車速、擋位隨加速時間變化情況。
1 模型的建立
1.1 假設條件
整車動力傳動系統的建模及動態仿真,是為了定性地了解換擋規律控制系統的有效性,故須將極其復雜的傳動系統簡化,同時又要保持其具有一般的動態特性,故對傳動系統作以下假設[3]:①不考慮傳動系統部件的彈性阻尼;②忽略扭振、擺振等振動的影響;③傳動軸和半軸只起傳遞轉矩的作用;④只考慮直線行駛狀態下的車輛動力學特性。
1.2 發動機模型
汽車動力傳動系統的作用是將發動機輸出的動力傳遞給車輪,驅動整車運動。發動機的工作過程受諸多因素影響,很難建立精確的發動機模型[4]。因此,在滿足仿真要求的條件下,建立發動機動態轉矩數學模型[5],即

式中:Te為發動機動態工況下的轉矩,N·m;Ie為等效轉換到發動機曲軸上的總轉動慣量,kg·m2;Mb為液力變矩器泵輪轉矩,N·m;we為發動機角速度,r/min。
發動機仿真模型如圖1 所示。
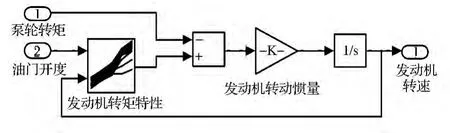
圖1 發動機仿真模型
1.3 液力自動變速器模型
液力自動變速器模型主要包括液力變矩器模型和機械變速器模型2 個部分。
(1)液力變矩器模型。液力變矩器主要用于緩沖來自發動機的轉矩脈動,減小傳動系的動載荷[6]。其理論數學模型可以用公式在變矩器模型中表示,一般通過查表方式得到變矩器在不同速比系統的轉矩系數、變矩系數和效率。
①液力變矩器的輸入特性為

式中:ρ為工作液體積質量,kg/m3;λb為泵輪轉矩系數,m-1·(r/min)-2;Nb為泵輪轉速,r/min;D為變矩器有效直徑,m。
②液力變矩器的輸出特性為

式中:Mt為渦輪轉矩,N·m;λt為渦輪轉矩系數,m-1·(r/min)-2。
液力變矩器3 條性能曲線方程[7]:

式中:i為液力變矩器的轉速比;k為液力變矩器變矩系數;η為液力變矩器傳動效率。
由式(2)、(3)、(4)可得
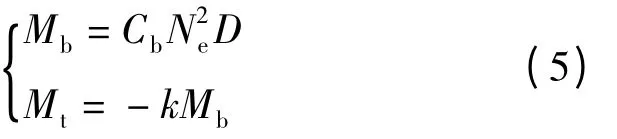
式中:Ne為發動機轉速,r/min;Cb為換算系數,kg·(r/min)-2。
(2)機械變速器模型。變速器系統的主要作用是通過改變發動機轉速來調節發動機輸出的轉矩和轉速,以適應不同的外界行駛環境[7]。其特性方程[6]為

式中:Tout、Tin為變速器的輸入和輸出轉矩,N·m;nout、nin為變速器的輸入和輸出轉速,r/min;ηt為變速器傳動效率;ig為變速器的傳動比。
(3)液力自動變速器仿真模型如圖2 所示。
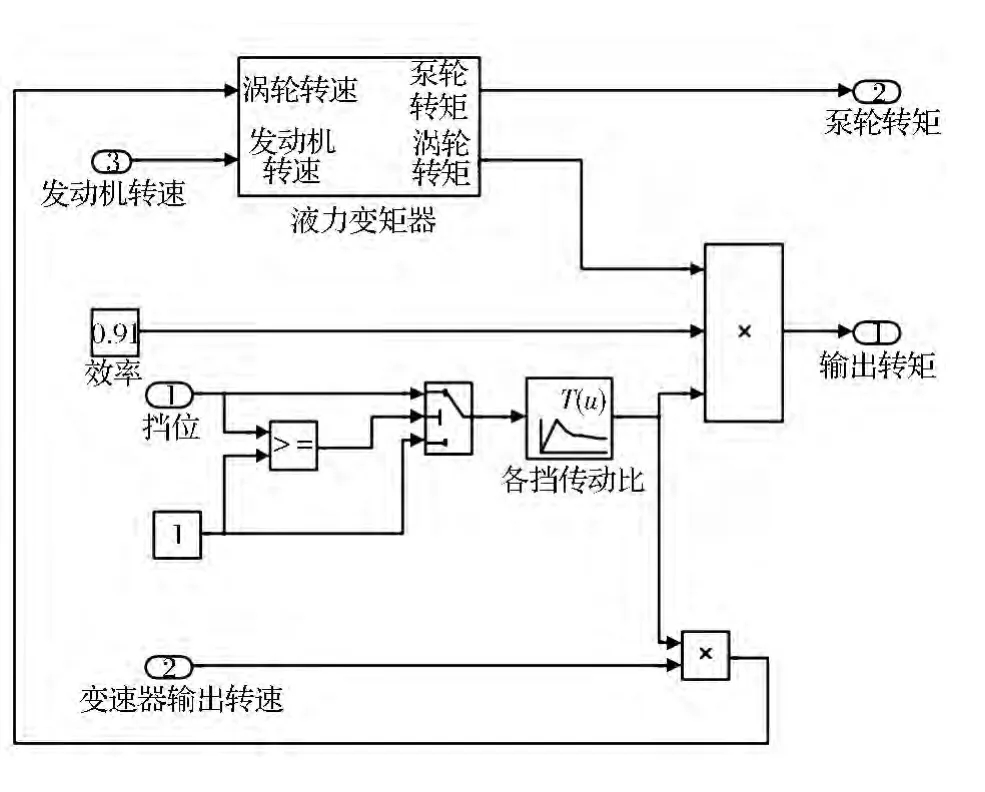
圖2 液力自動變速器仿真模型
1.4 整車行駛動力學模型
在附著力得到保證的情況下,汽車的驅動力越大,其動力性能越好[1]。平直路面整車行駛動力學數學模型[8]為

其中
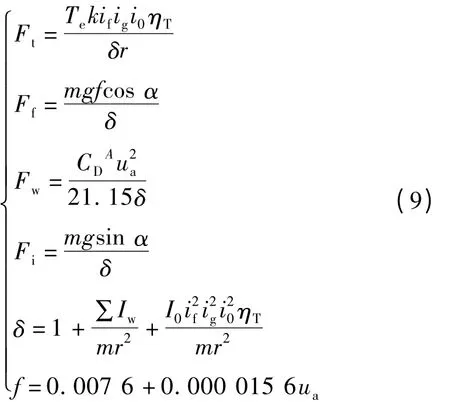
式中:Ft為行駛驅動力,N;Ff為滾動阻力,N;Fw為空氣阻力,N;Fi為坡度阻力,N;Fj為加速阻力,N;if為分動器傳動比;Te為發動機轉矩,N·m;i0為主減速器傳動比;ηT為傳動系統的機械效率;r為車輪半徑,m;g為重力加速度,9.8 m/s2;f為滾動阻力系數;CD為空氣阻力系數;A為迎風面積,m2;ua為車速,km/h;m為整車質量,kg;∑Iw為車輪轉動慣量,kg·m2;δ為旋轉質量換算系數;α為道路坡度;I0為飛輪轉動慣量,kg·m2。
整車行駛系統仿真主要參數見表1。整車行駛動力學仿真模型如圖3 所示。
2 整車傳動系統模型仿真分析
根據上述分析,在Matlab 仿真環境下,將所建立的各部件仿真子系統的通信數據信號連接起來,加入輸入模塊(油門開度)、換擋控制模塊以及其他必要的顯示模塊,即可得到該高機動越野車整車傳動系統仿真模型(如圖4 所示)。
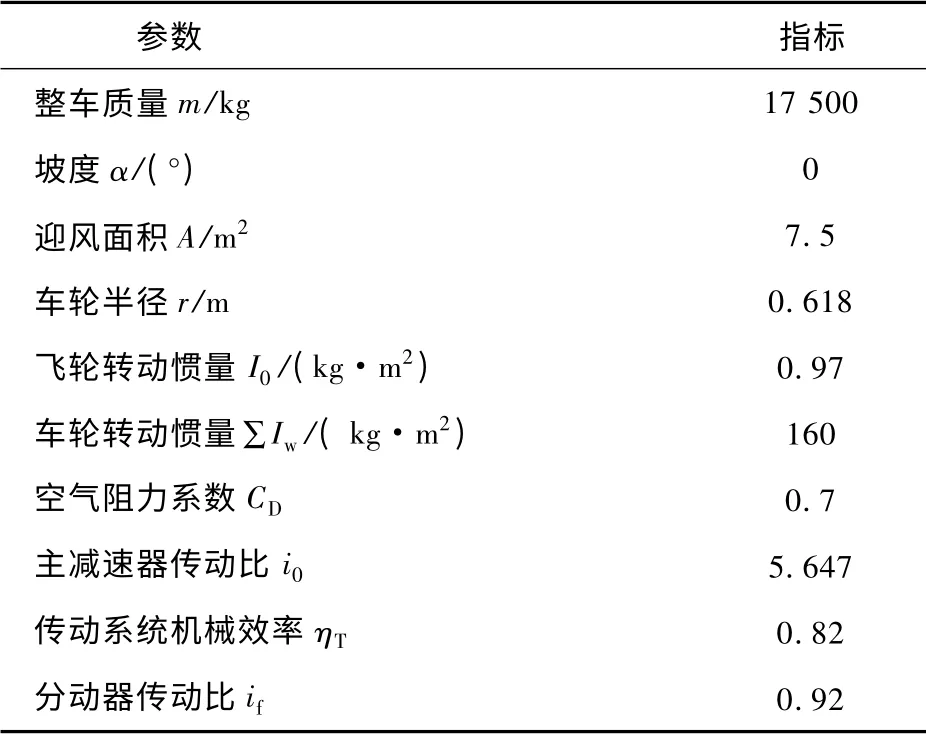
表1 整車行駛系統仿真主要參數
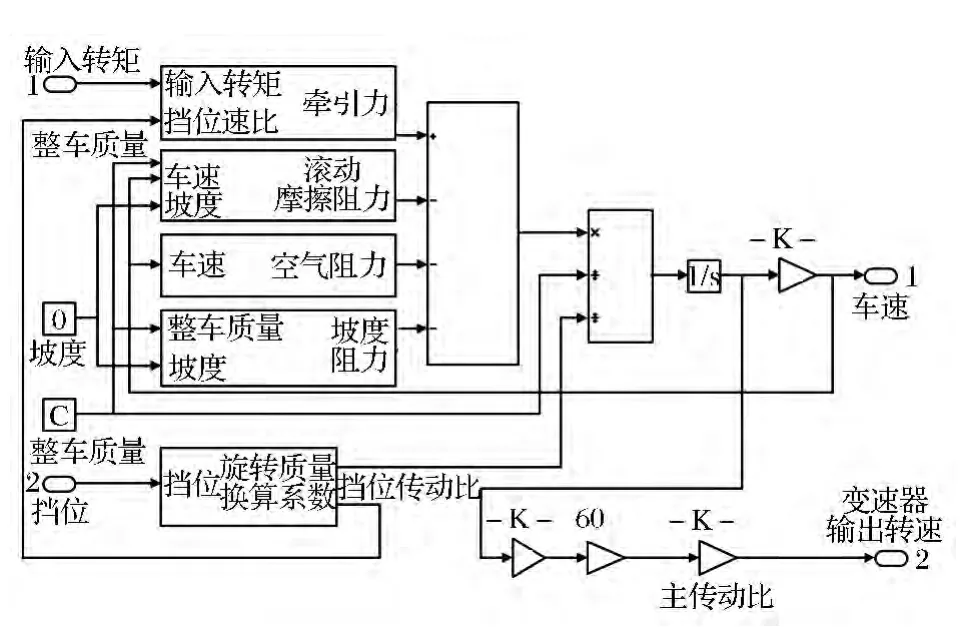
圖3 整車行駛動力學仿真模型
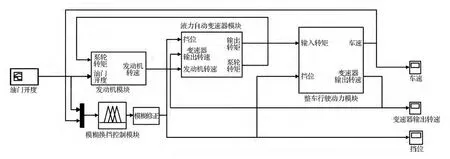
圖4 整車傳動系統動態仿真模型
由圖4 可知,換擋邏輯判斷模塊是一個以油門開度和車速為參數的2 個參數模糊控制換擋模塊[9-10]。為加強對比效果,根據所測數據,仿真選擇以90%油門開度為例,驗證整車加速性能仿真模型的有效性。用所建模型對車輛限定油門從1擋起步加速過程進行仿真,當限定油門開度為90%時,行星齒輪變速箱擋位由1 擋逐步升至6擋,車輛行駛速度不斷增大,發動機轉速由于外界阻力的變化而呈現不規律變化,發動機輸出轉矩因發動機轉速的變化而變化。擋位和車速的變化如圖5 所示,整車試驗結果如圖6 所示。
分析圖5、圖6 可知,在相同油門開度下,仿真結果和試驗結果的整車車速變化趨勢基本一致,各擋位換擋點車速和整車試驗所得換擋點車速基本一致。可見,此整車動力傳動系統模型仿真結果基本符合車輛實際運行情況,輸出量和輸入量整體趨勢基本相符合。
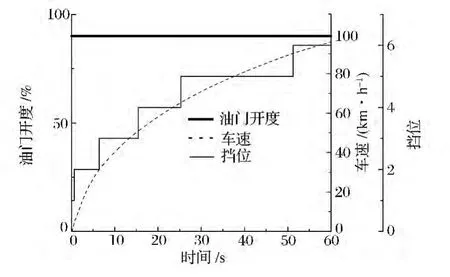
圖5 整車仿真結果
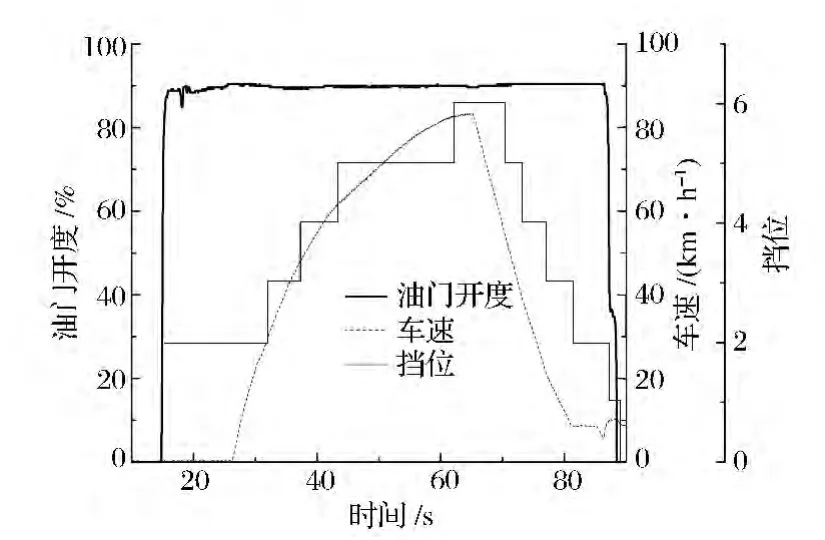
圖6 整車試驗結果
3 結 語
本文建立了某液力傳動系統車輛整車動力傳動系統的動態仿真模型,并對所建模型的整車加速性能進行了仿真,通過仿真計算得出衡量整車起步加速性能指標的變化規律。仿真結果表明,輸出量和輸入量變化趨勢與整車實際運行的情況基本一致,說明該整車動力傳動系統模型及其各模塊模型科學準確,可為整車動態建模提供參考。
[1] 余志生.汽車理論[M].北京:機械工業出版社,2009:1-2.
[2] 駱清國,張永鋒.機械傳動車輛起步及連續加速過程性能仿真研究[J].車用發動機,2004,150(2):28-31.
[3] 張炳力,張友皇,趙韓. 基于Simulink 與Stateflow 的自動變速器性能仿真[J]. 合肥工業大學學報,2010,33(8):1125-1130.
[4] 周云波,常思勤,魏巍. 基于MATLAB/SimDriveline 的某型軍用車輛起步過程仿真研究[J]. 南京理工大學學報,2011,35(4):507-512.
[5] 魏勝鋒,王紹武,張云龍,等.發動機實時模擬系統中的發動機模型及其應用[J].內燃機工程,2002,24(6):62-66.
[6] 汪志遠,鄭培,孫肇花. 基于Matlab 的液力機械自動變速器性能仿真[J].車輛與動力技術,2007,106(2):10-13.
[7] 張勇,許純新,盧新田,等.車輛自動變速系統性能仿真研究[J].農業機械學報,2000,31(1):23-25.
[8] 王望予.汽車設計[M]. 北京;機械工業出版社,2004:78-113.
[9] 巫世晶,朱恩涌,李群力,等. 汽車模糊控制換擋策略仿真研究[J]. 西南交通大學學報,2012,43(6):756-761.
[10] Guo Xuexun,Fu Chang,Chen Fei,et al. Modeling and simulation research of dual clutch transmission based on fuzzy control[C]//SAE Paper.Ditroit,MI,USA,2007-01-3754.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
