表貼式永磁同步電機對稱穩(wěn)態(tài)運行仿真研究
2014-12-07 06:05:04張慶湖陳俊全
艦船科學(xué)技術(shù) 2014年10期
關(guān)鍵詞:有限元
張慶湖,王 東,陳俊全,魏 錕
(海軍工程大學(xué),艦船綜合電力技術(shù)國防科技重點實驗室,湖北 武漢430033)
0 引 言
提高轉(zhuǎn)速是提高電機功率密度最有效的手段之一,目前高速電機的研究正在成為國際電機領(lǐng)域的熱點,其轉(zhuǎn)速可達上萬轉(zhuǎn)/分有些甚至到100 萬轉(zhuǎn)/分[1]。其中永磁同步電機具有體積小﹑響應(yīng)快、效率高等特點,所以特別適合高速運行。表貼式永磁同步電動機具有氣隙大導(dǎo)致電樞反應(yīng)電抗小的特殊性。正是由于阻抗小的原因,導(dǎo)致在時域仿真中這種永磁同步電動機對于輸入電壓源的初始相位和大小有很強的敏感性。在已知轉(zhuǎn)子初始位置時,為了滿足電動機在對稱穩(wěn)態(tài)運行時達到額定輸出功率和額定繞組電流的要求,找到一種準(zhǔn)確確定輸入電壓的方法就很重要。
本文針對該類表貼式高速永磁同步電動機以恒定轉(zhuǎn)速對稱穩(wěn)態(tài)運行工況,提出一種基于同步電動機穩(wěn)態(tài)運行時定子繞組端口等效電路的相量圖與Ansoft 有限元仿真相結(jié)合的方法,并以100 kW 表貼式永磁同步電動機為例,利用這種方法來確定達到額定負(fù)載工況需要的輸入電壓的初始相位和幅值。
1 表貼式永磁同步電動機主要參數(shù)
本文例子為100 kW 表貼式永磁同步電動機,其主要參數(shù)如表1所示。利用MAXWELL 2D,建立該永磁電動機的二維有限元模型如圖1所示。
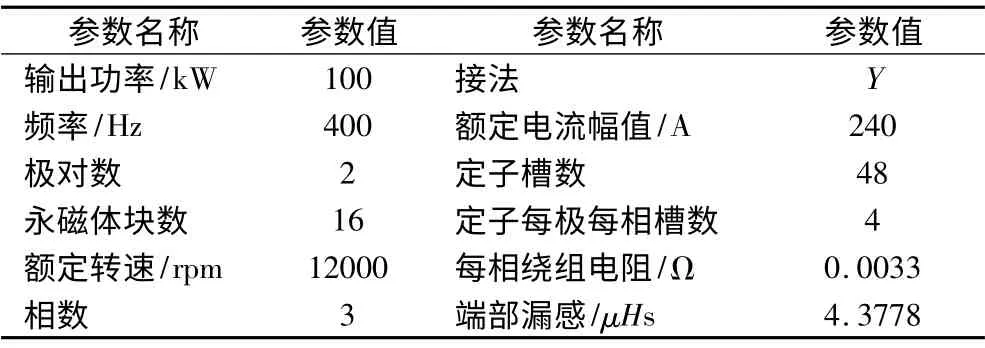
表1 100 kW 表貼式永磁同步電動機基本參數(shù)Tab.1 Basic parameters of 100 kW SPMSM
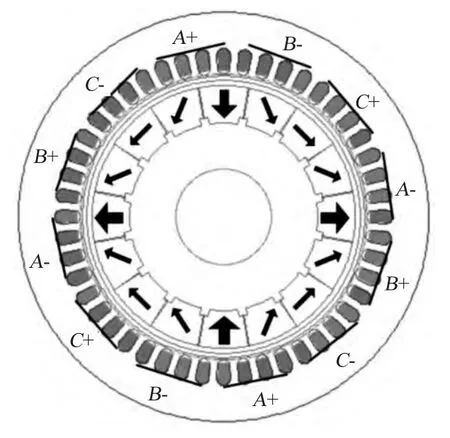
圖1 表貼式永磁同步電動機模型Fig.1 The model of SPMSM
其中轉(zhuǎn)子上16 塊永磁體的充磁方向是一種Halbach的方式[2],只有4 塊是徑向(2 塊為N 極,2 塊為S 極),它們之間都隔著3 塊斜向充磁永磁體。具體充磁方向如圖1 中箭頭所示,各相定子繞組如圖1 中標(biāo)注所示,這種充磁方式可以顯著增強永磁體磁極的磁場強度[3]。空載時通過仿真得到它的氣隙磁密分布如圖2所示,經(jīng)過FFT 分析后得到各次諧波分量如表2所示。可以看出,該電機氣隙磁密具有很好的正弦分布。
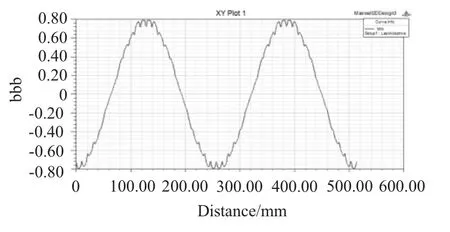
圖2 空載氣隙磁密分布圖Fig.2 Distribution of unloaded air gap flux magnetic density

表2 氣隙磁密各次諧波分量Tab.2 The harmonic components of the air gap magnetic flux density
2 永磁電機的穩(wěn)態(tài)數(shù)學(xué)模型
為簡化分析,作如下假設(shè):
1)電動機定子三相繞組對稱,A,B,C 三相繞組軸線依次滯后120°電角度(基波;磁場);
2)不考慮鐵磁材料的渦流和磁滯損耗;
3)永磁極產(chǎn)生正弦波氣隙磁場,且氣隙均勻。
正方向的規(guī)定:
1)定子繞組電壓、電流采用電動機慣例;
2)定子電流正方向與該相繞組軸線的正方向滿足右手螺旋關(guān)系,即正的定子電流產(chǎn)生正的定子繞組磁鏈;
3)轉(zhuǎn)子逆時針旋轉(zhuǎn)方向為正,且d 軸滯后q 軸90°。
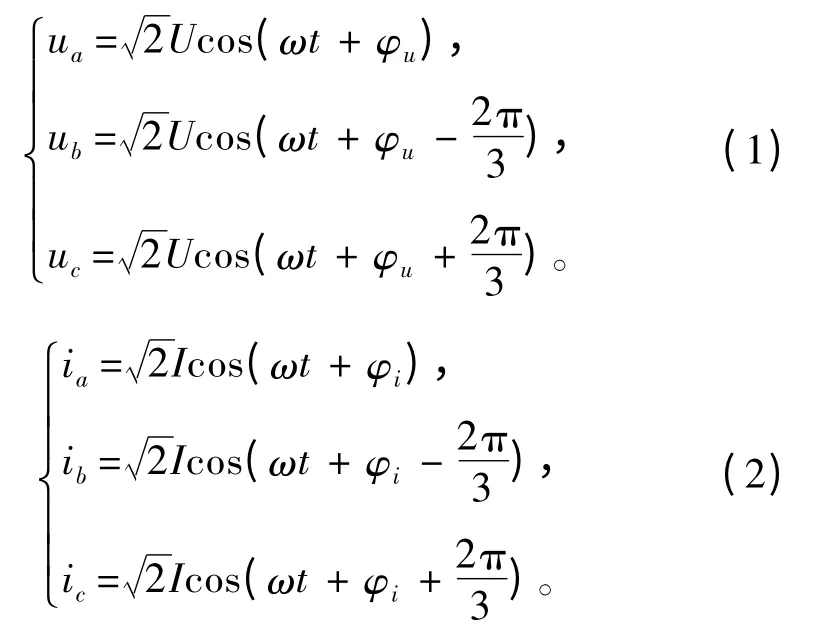
給三相同步電動機通入三相對稱的正弦電壓,假設(shè)相電壓和所產(chǎn)生的相電流分別如式(1)和式(2)所示。
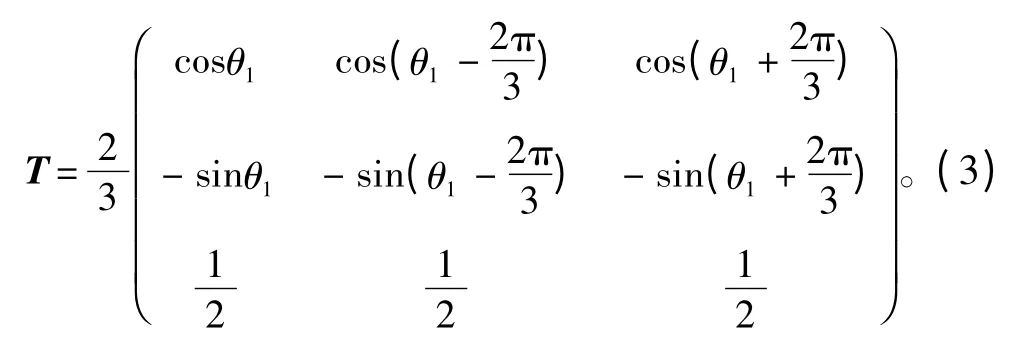
經(jīng)過Park 變換[4],可以將ABC 三相電壓和電流變換成隨轉(zhuǎn)子同步旋轉(zhuǎn)的dq 軸變量,以便進行相量圖的計算。變換矩陣如式(3)所示。
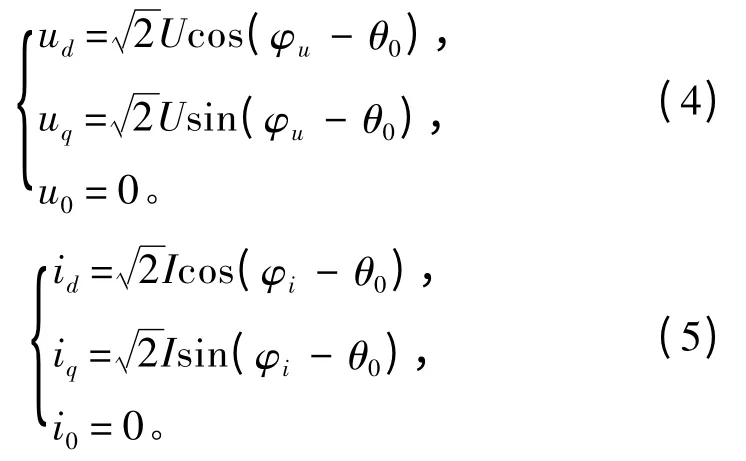
電動機穩(wěn)定運行時可取θ1=ωt +θ0(以A 相繞組軸線為0°,θ1為t 時刻轉(zhuǎn)子直軸的電角度,θ0為初始時刻轉(zhuǎn)子直軸的電角度),則有
假設(shè)如圖1所示為初始時刻,則可以用圖3 表示ABC 三相軸和初始時刻dq 軸的夾角關(guān)系。圖中粗實線分別表示d 軸和q 軸,它們互相垂直。細(xì)實線分別表示ABC 三相軸,它們依次相差的電角度為120°。若以A 相正方向軸為0°,根據(jù)圖3 只要確定了初始時刻d 軸的電角度為θ0,其余所有夾角都已經(jīng)確定。
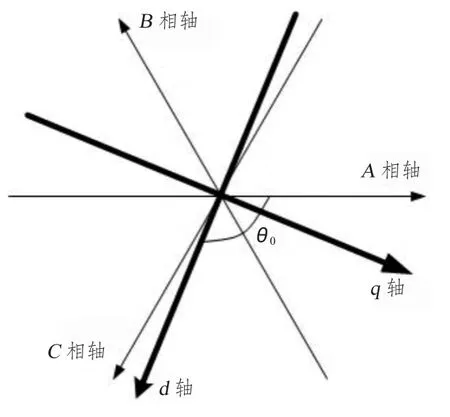
圖3 初始時刻dq 軸與相軸夾角關(guān)系Fig.3 The angle relationship of dq axis and pahse axis at initial-time
電動機穩(wěn)定運行于同步轉(zhuǎn)速時,根據(jù)雙反應(yīng)理論可以寫出永磁同步電動機的電壓方程[5]:

式中:E0為永磁氣隙基波磁場產(chǎn)生的每相空載反電動勢有效值,V;U為外施相電壓有效值,V;I為定子相電流有效值,A;R為定子繞組相電阻,Ω;Xad和Xaq為分別為直交軸電樞反應(yīng)電抗,Ω;Xd和Xq為分別為直交軸同步電抗,Ω;Xσ為定子漏抗,Ω;Id和Iq為分別為直交軸電樞電流。
由于該永磁同步電動機氣隙均勻,因此可認(rèn)為電動機的直軸和交軸同步電抗相等,于是

此時根據(jù)文獻[5]有各相量滿足關(guān)系如圖4所示。
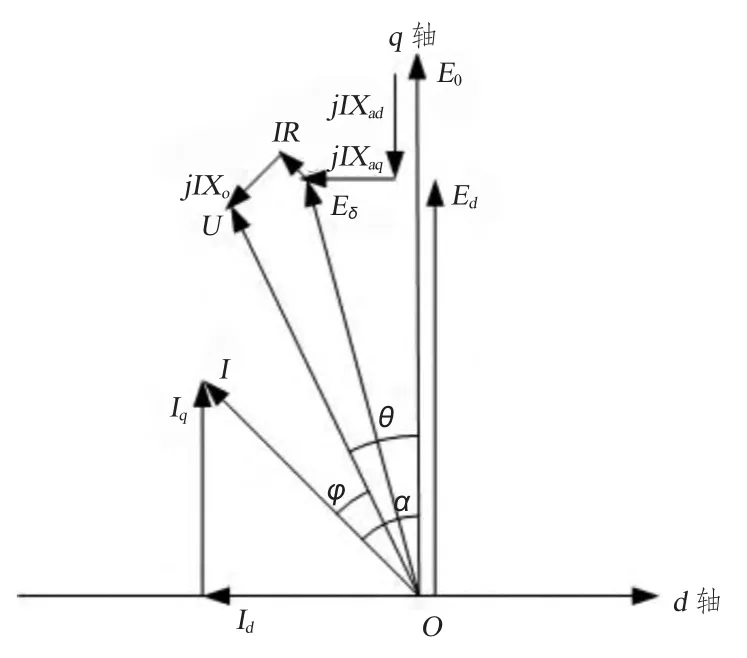
圖4 傳統(tǒng)永磁同步電動機相量圖Fig.4 Traditional phasor diagram of PMSM
根據(jù)傳統(tǒng)的相量圖,在理想情況下只要測出E0,Xad,Xaq和Xσ就可以根據(jù)額定電流I的大小和額定功率計算出所需要的電壓U的幅值和相位。但當(dāng)電動機帶負(fù)載運行時,由于電樞反應(yīng)會使永磁體的工作點發(fā)生變化從而使E0發(fā)生變化,而且定子鐵心的非線性也會導(dǎo)致其電樞同步電抗也不為一個定值,即使采用有限元方法進行特定電樞電流工況下的電樞反應(yīng)電抗和漏抗計算過程也比較復(fù)雜[6-7]。
事實上,從電路等效的角度考慮,可以采用如圖5所示的等效電路,僅需要計算定子電阻和定子端部漏抗,而且回避了如前所述的諸多因素。
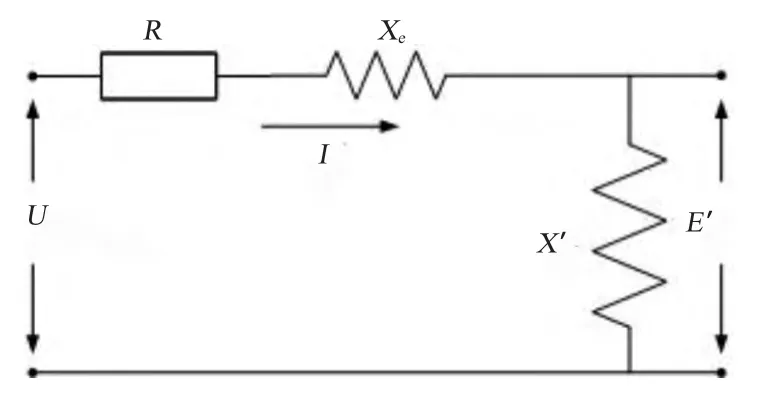
圖5 定子繞組等效電路圖Fig.5 The equivalent circuit of stator windings
根據(jù)等效電路圖有關(guān)系

其中Xe為端部漏抗,Xe和R 在仿真實驗中均屬于外部參數(shù)(見表1),并且有

X′的端電壓E′可以由Ansoft 很方便地計算。此時簡化的相量圖如圖6所示。
此時根據(jù)圖6和式(4)及式(5)有,U和I與q 軸的夾角分別為:

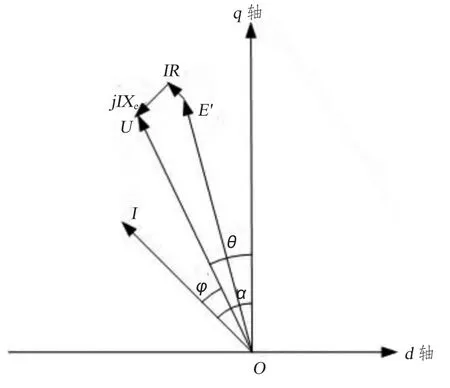
圖6 基于等效電路的相量圖Fig.6 The phasor diagram based on equivalent circuit
3 仿真過程和結(jié)果
首先采用Ansoft 仿真軟件進行電流源激勵下的時步有限元仿真計算。此時只要任意給定一個φi和幅值為額定值的三相對稱電流作為該電動機模型的激勵源,就可以在軟件計算結(jié)果中通過InducedVoltage 項得到圖6中的E′,再由式(8)通過軟件計算出U。此時再對得到的U的波形進行FFT 分析,得到它的基波幅值| U|和它與電流輸入I的相位差φ(功率因數(shù)角),從而利用式(11)得到此時的電動機輸出功率:

當(dāng)圖6 中在電流輸入I與q 軸夾角α 從0°~90°連續(xù)變化時,電動機的輸出功率Pout也應(yīng)該連續(xù)變化。若通過仿真先計算出兩端的功率值,則只要額定功率值在二者之間,根據(jù)二分法總可以得到足夠逼近額定功率的電流相角度α,這時對應(yīng)的電壓U就可以作為在電壓源激勵下的輸入。
利用上述這個算法(二分法順序)對100 kW 永磁同步電機以圖1所示為初始時刻(此時θ0=-112.5°)的仿真計算結(jié)果如表3所示。
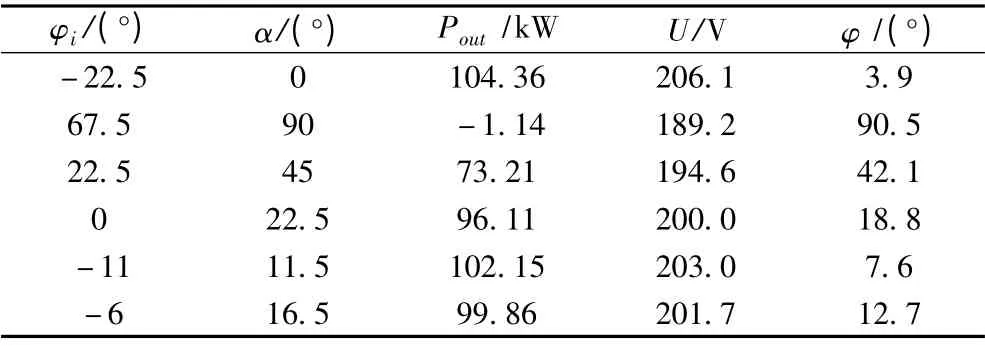
表3 仿真過程及結(jié)果Tab.3 Simulation process and results
當(dāng)φi=-6°時,電動機的輸出功率為99.86 kW,足夠接近100 kW,由圖6 得到φu=-18.7°。這時再利用式(1)可以得到此刻的三相電壓值,并以此作為電壓源輸入,進行電壓源激勵下的時步有限元仿真,得到的繞組電流和輸出轉(zhuǎn)矩結(jié)果如圖7和圖8所示。從圖可以得到此刻的繞組電流為幅值238 A,相比于額定幅值240 A 誤差為0.83%。輸出轉(zhuǎn)矩為78.94 Nm/s,即此時的輸出功率為99.2 kW,相比表3 中的輸出功率99.86 kW 誤差為0.67%。
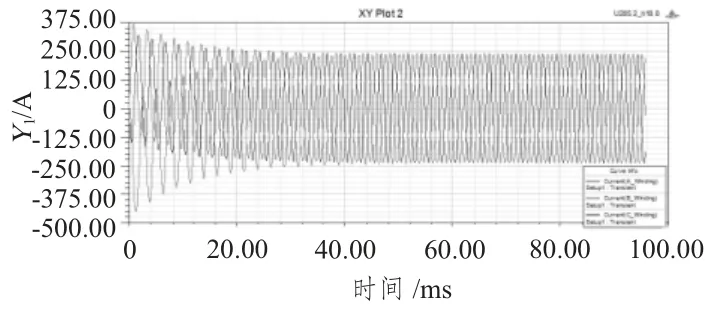
圖7 定子繞組電流Fig.7 Currents of the stator windings
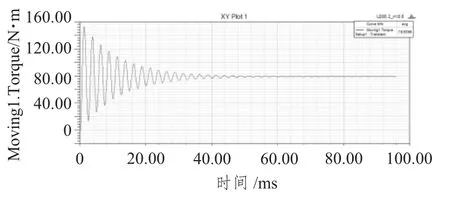
圖8 電動機輸出轉(zhuǎn)矩Fig.8 Output torque of the motor
4 結(jié) 語
本文針對氣隙均勻的表貼式永磁同步電動機,介紹了一種基于定子等效電路的相量圖法。這種方法結(jié)合有限元仿真的特點得到簡化的等效電路和相量圖,把定子電感分成端部漏感和其他電感兩部分,后者所感應(yīng)的電動勢可以很方便地用仿真軟件計算出來,避免了永磁電動機工作點變化和同步感抗等參數(shù)的不確定性。結(jié)果表明,這種方法計算得到的電壓可以較為準(zhǔn)確有效地達到額定工況的要求。推而廣之,這種方法也可以適用于氣隙均勻的表貼式永磁同步電動機在任何可能負(fù)載下穩(wěn)態(tài)的仿真,并能達到較好的效果。
[1]ZWYSSIG C.Magaspeed drive systems:pushing beyond 1 million r/min [J].IEEE/ASME Transactions on Mechatronics,2009,14(5):564-574.
[2]HALBACH K.Design of permanent multipole magnets with oriented rare earth cobalt material[J].Nuclear Instruments and Methods,1981,169:1-10.
[3]XIA Z P,ZHU Z Q,HOWE D.Analytical magnetic field analysis of halbach magnetized permanent-magnet machines[J].IEEE Transactions on Magnetics,2004,40(4):1864-1872.
[4]ZHANG Gai-fan,MA Wei-ming.Transient analysis of synchronous machines [M].Hubei Science and Technology Press,2001.
[5]唐任遠(yuǎn).現(xiàn)代永磁電機理論與設(shè)計[M].北京:機械工業(yè)出版社,1997.TANG Ren-yuan.Modern permanent magnet machines[M].Beijing:China Machine Press,1997.
[6]李和明,張健.基于時步有限元的永磁同步電機穩(wěn)態(tài)參數(shù)改進計算方法[J].電工技術(shù)學(xué)報,2012(4):35-41.LI He-ming,ZHANG Jian.An improved calculation method for steady-state parameters of PMSM with T-S FEM[J].Transactions of China Electrotechnical Society,2012(4):35-41.
[7]LEE Ji-yong,LEE Sang-ho.Determination of parameters considering magnetic nonlinearity in an interior permanent magnet synchronous motor[J].IEEE Transactions on Magnetics,2006,42(4):1303-1306.
猜你喜歡
艦船科學(xué)技術(shù)(2022年20期)2022-11-28 08:19:18
數(shù)學(xué)物理學(xué)報(2022年4期)2022-08-22 04:09:28
減速頂與調(diào)速技術(shù)(2020年4期)2020-11-22 07:20:26
上海節(jié)能(2020年3期)2020-04-13 13:16:16
石油化工建設(shè)(2019年6期)2020-01-16 08:03:42
天津醫(yī)科大學(xué)學(xué)報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(shù)(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18