步進(jìn)電機(jī)矩角關(guān)系連續(xù)測試方法的研究
2014-12-05 06:53:38余方玉趙美蓉林玉池黃銀國
中國機(jī)械工程 2014年3期
余方玉 趙美蓉 林玉池 黃銀國
天津大學(xué)精密測試技術(shù)及儀器國家重點(diǎn)實(shí)驗(yàn)室,天津,300072
0 引言
步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。步進(jìn)電機(jī)以脈沖驅(qū)動(dòng)的形式,不需要A/D轉(zhuǎn)換,直接將數(shù)字脈沖信號(hào)轉(zhuǎn)化成為角位移。與轉(zhuǎn)子位置相關(guān)的轉(zhuǎn)矩特性體現(xiàn)了步進(jìn)電機(jī)的實(shí)際步進(jìn)精度[1-3]。理論研究表明,保持狀態(tài)下步進(jìn)電機(jī)的力矩和轉(zhuǎn)角是一種接近正弦的關(guān)系(每個(gè)轉(zhuǎn)角周期內(nèi)出現(xiàn)的力矩最大值稱為步進(jìn)電機(jī)的保持力矩)。現(xiàn)有的方法難以實(shí)現(xiàn)對(duì)這種關(guān)系的連續(xù)測試,但對(duì)這種關(guān)系的測試卻是步進(jìn)電機(jī)應(yīng)用和理論研究不可或缺的環(huán)節(jié)。
目前比較常用的測試方法有加載砝碼法、電子稱法和砝碼-彈簧秤法[4]。加載砝碼法原理清晰,實(shí)現(xiàn)簡單,但只能測得保持力矩,不能獲得力矩和轉(zhuǎn)角的對(duì)應(yīng)關(guān)系;電子稱法和砝碼-彈簧秤法無法實(shí)現(xiàn)滿圓周連續(xù)矩角特性測試,且失調(diào)角的測試準(zhǔn)確度不高。針對(duì)矩角關(guān)系測試中的難點(diǎn),本文提出一種新的測試方法,實(shí)現(xiàn)步進(jìn)電機(jī)矩角關(guān)系的滿圓周連續(xù)測試。
1 步進(jìn)電機(jī)的電磁力矩?cái)?shù)學(xué)模型
以兩相混合式步進(jìn)電機(jī)為例,在不考慮電機(jī)繞組磁滯、磁飽和等現(xiàn)象,忽略電機(jī)的繞組互感、高次諧波力矩和定位力矩的情況下,電機(jī)的電磁力矩Te可表示為[5-8]

式中,k為電機(jī)電磁力矩系數(shù);ia、ib分別為步進(jìn)電機(jī)A相和B相通的電流;zr為電機(jī)轉(zhuǎn)子齒數(shù);θ為電機(jī)轉(zhuǎn)子位置角。
電機(jī)處于保持狀態(tài)時(shí),ia、ib為常量。對(duì)于確定的步進(jìn)電機(jī),電機(jī)轉(zhuǎn)子齒數(shù)zr為常量。此時(shí),矩角關(guān)系曲線為隨位置角θ變化的正弦曲線,周期為

2 步進(jìn)電機(jī)矩角關(guān)系測試方法
對(duì)步進(jìn)電機(jī)矩角的測試既要測得步進(jìn)電機(jī)轉(zhuǎn)子相對(duì)于定子的位置,又要測得該位置電機(jī)的電磁力矩。保持狀態(tài)下,傳統(tǒng)的靜態(tài)測試思路是通過外加驅(qū)動(dòng)力將電機(jī)驅(qū)動(dòng)到不同的位置,然后在每個(gè)位置測量電機(jī)的電磁力矩。這種思路在整圓周內(nèi)選取一些分離的點(diǎn)進(jìn)行測試時(shí)比較容易實(shí)現(xiàn),卻無法進(jìn)行整圓周矩角關(guān)系的連續(xù)測試。本文提出一種基于實(shí)時(shí)力矩平衡原理進(jìn)行矩角關(guān)系測試的方法[9-10],借助驅(qū)動(dòng)機(jī)構(gòu)帶動(dòng)處于保持狀態(tài)下的步進(jìn)電機(jī)勻速轉(zhuǎn)動(dòng),將步進(jìn)電機(jī)看成驅(qū)動(dòng)裝置的負(fù)載,則驅(qū)動(dòng)力矩和步進(jìn)電機(jī)的電磁力矩相等,對(duì)驅(qū)動(dòng)力矩進(jìn)行實(shí)時(shí)監(jiān)測即可實(shí)現(xiàn)電磁力矩的連續(xù)測試。
根據(jù)圖1詳述該測試方法的力矩傳動(dòng)和角度傳遞機(jī)理。驅(qū)動(dòng)裝置帶動(dòng)步進(jìn)電機(jī)勻速轉(zhuǎn)動(dòng),角度監(jiān)測裝置和力矩監(jiān)測裝置實(shí)時(shí)監(jiān)測傳動(dòng)主軸的位置與力矩。對(duì)主傳動(dòng)軸上的傳遞力矩進(jìn)行分析,得力矩平衡方程:

式中,T為力矩監(jiān)測裝置上的實(shí)測力矩;Te為步進(jìn)電機(jī)的電磁力矩;TJ為由運(yùn)動(dòng)引起的慣性力矩;Tf為角度監(jiān)測裝置引起的摩擦力矩;J為負(fù)載的轉(zhuǎn)動(dòng)慣量;α為傳動(dòng)主軸的角加速度。

圖1 矩角關(guān)系測試方法分析圖
測試階段保證傳動(dòng)軸勻速運(yùn)動(dòng)則α=0,即TJ=0。摩擦力矩Tf分兩種情況分析,若采用非接觸的測角裝置,則摩擦力矩不存在,即Tf=0;若采用接觸式的測角裝置,因?yàn)檫@些裝置的動(dòng)摩擦力矩一般較小,并且可以通過測試獲得,然后修正,即有

因此,無論是采用非接觸式還是接觸式的角度監(jiān)測裝置,摩擦力矩都不會(huì)對(duì)測試結(jié)果造成影響。測試時(shí),驅(qū)動(dòng)裝置和步進(jìn)電機(jī)固定,角度傳遞是一個(gè)剛性傳遞過程,即角度監(jiān)測裝置監(jiān)測到的傳動(dòng)主軸的角度信息直接反映步進(jìn)電機(jī)轉(zhuǎn)子的位置。由以上分析可知,該測試方法可以實(shí)現(xiàn)步進(jìn)電機(jī)矩角關(guān)系的滿圓周連續(xù)測試。
3 步進(jìn)電機(jī)矩角關(guān)系測試系統(tǒng)設(shè)計(jì)
根據(jù)測試方法和原理設(shè)計(jì)步進(jìn)電機(jī)矩角關(guān)系測試系統(tǒng)。系統(tǒng)中,角度監(jiān)測裝置選用增量式角度編碼器,分辨率為13″;力矩監(jiān)測裝置選用動(dòng)態(tài)扭矩傳感器,量程為-20~20N·m,測量精度為0.1%滿量程(F.S.);驅(qū)動(dòng)裝置選用直流永磁式力矩電機(jī),實(shí)現(xiàn)高精度穩(wěn)速控制;選用數(shù)據(jù)采集板卡進(jìn)行數(shù)據(jù)采集和驅(qū)動(dòng)控制;設(shè)計(jì)傳感器信號(hào)處理電路來保證采集卡采集到的測試信號(hào)穩(wěn)定、可靠;在PC機(jī)上,開發(fā)測量控制軟件,對(duì)整個(gè)測試系統(tǒng)和過程進(jìn)行控制。測試系統(tǒng)如圖2所示。

圖2 測試系統(tǒng)實(shí)物圖
測試系統(tǒng)設(shè)計(jì)完成后對(duì)系統(tǒng)進(jìn)行調(diào)試,檢查機(jī)械框架、接口的固定及各部分線纜的連接狀態(tài),確保框架固定、連接完好。完成后,測試力矩電機(jī)、機(jī)械框架、扭矩傳感器和角度編碼器之間的電絕緣狀況,保證這些部件之間的電絕緣,切斷電磁干擾的耦合路徑。安裝步進(jìn)電機(jī)前,首先空載運(yùn)行,測試由摩擦、安裝偏心等引起的附加力矩,在測試系統(tǒng)中進(jìn)行修正。
4 實(shí)驗(yàn)及數(shù)據(jù)分析
測試系統(tǒng)設(shè)計(jì)完成后,在實(shí)驗(yàn)室環(huán)境下以常州雙杰電機(jī)公司生產(chǎn)的兩相混合式步進(jìn)電機(jī)130BYG250為被測對(duì)象,測試保持狀態(tài)下步進(jìn)電機(jī)的矩角關(guān)系,來驗(yàn)證本文測試方法的正確性。130BYG250步進(jìn)電機(jī)的轉(zhuǎn)子有50個(gè)齒,步距角為1.8°,電流為6A時(shí),步進(jìn)電機(jī)保持力矩為20N·m。測試時(shí),步進(jìn)電機(jī)的電流為3.5A。
安裝好被測步進(jìn)電機(jī),使其處于保持狀態(tài)。設(shè)置測試系統(tǒng)的測試參數(shù)(主要包括力矩電機(jī)帶動(dòng)步進(jìn)電機(jī)運(yùn)行的轉(zhuǎn)速及角度),測量控制軟件控制測試系統(tǒng)按設(shè)定參數(shù)運(yùn)行,一次測試完成后可以選擇停止矩角關(guān)系測試或者重新設(shè)置測試參數(shù)進(jìn)行下次測試,下面進(jìn)行詳細(xì)的數(shù)據(jù)分析。
從前述測試方法的分析可知,能否保證驅(qū)動(dòng)裝置勻速運(yùn)行是測試結(jié)果正確與否的關(guān)鍵。圖3所示為一次測試的角度-時(shí)間曲線,測試時(shí)設(shè)置轉(zhuǎn)速為0.1r/min。從圖3可以看出,驅(qū)動(dòng)轉(zhuǎn)速恒定,系統(tǒng)是恒速模式運(yùn)行。

圖3 角度-時(shí)間曲線整圓周測試圖
為了更好地分析驅(qū)動(dòng)轉(zhuǎn)速狀況,繪制角度-時(shí)間局部曲線,如圖4所示。從圖4可以看出,方框內(nèi)的角度-時(shí)間曲線不是直線,說明轉(zhuǎn)速在這些位置處有角加速度,則式(4)的慣性力矩不再為零。按式(4)來計(jì)算慣性力矩的大小,得總轉(zhuǎn)動(dòng)慣量遠(yuǎn)小于1kg·m2,轉(zhuǎn)速波動(dòng)處角加速度最大值為0.4r/min2,產(chǎn)生的最大慣性力矩為8×10-4N·m。為了分析該力矩對(duì)測試結(jié)果的影響,繪制綜合分析曲線,如圖5所示。圖5中,直線為角度-時(shí)間曲線,類正弦曲線為力矩-時(shí)間曲線,方框內(nèi)對(duì)應(yīng)轉(zhuǎn)速波動(dòng)區(qū)域。從圖5可以看出,轉(zhuǎn)速波動(dòng)處對(duì)應(yīng)力矩-時(shí)間曲線上的谷值點(diǎn)位置,力矩范圍為9~10N·m,比附加慣性力矩大4個(gè)數(shù)量級(jí),所以慣性力矩影響可以忽略不計(jì)。

圖4 角度-時(shí)間曲線(局部)
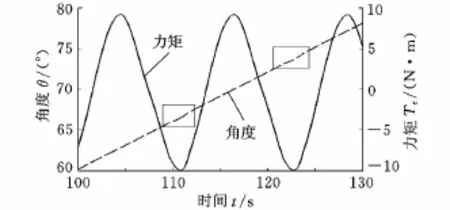
圖5 綜合分析曲線圖
為了驗(yàn)證系統(tǒng)運(yùn)行的重復(fù)性,在相同的測試參數(shù)下進(jìn)行多次的矩角關(guān)系測試,測試結(jié)果如圖6所示。為了進(jìn)一步驗(yàn)證系統(tǒng)運(yùn)行狀況,在測試電流相同、測試轉(zhuǎn)速不同時(shí)進(jìn)行測試,測試結(jié)果如圖7所示。從圖6、圖7可以看出,根據(jù)本文方法所設(shè)計(jì)的系統(tǒng)運(yùn)行穩(wěn)定可靠。

圖6 相同轉(zhuǎn)速下測試曲線比較
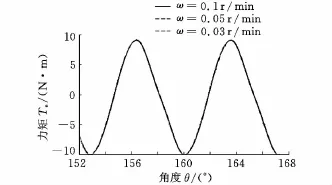
圖7 不同轉(zhuǎn)速下測試曲線比較
式(1)說明,在不考慮次要因素時(shí),保持狀態(tài)下,步進(jìn)電機(jī)的矩角關(guān)系曲線是一條正弦曲線。如果文中所提出測試方法是正確的,則實(shí)測步進(jìn)電機(jī)矩角關(guān)系應(yīng)該是一個(gè)正弦關(guān)系。從圖6、圖7可以看出,測試曲線輪廓接近正弦曲線,為了驗(yàn)證這一點(diǎn),對(duì)測試數(shù)據(jù)進(jìn)行擬合,擬合曲線的數(shù)學(xué)表達(dá)式為

式中,T′e為擬合力矩,N·m。
從式(6)可以看出,擬合曲線為正弦曲線,圖8為實(shí)測曲線和擬合曲線的比較圖。從圖8可以看出,實(shí)測曲線和擬合曲線基本重合,力矩最大相差0.23N·m,在驗(yàn)證步進(jìn)電機(jī)矩角特性正弦變化規(guī)律的同時(shí)也驗(yàn)證了所研究方法的正確性。曲線重合度較差的區(qū)域出現(xiàn)在力矩變化循環(huán)下半個(gè)周期,這是由驅(qū)動(dòng)裝置的本身性能引起的:力矩上升的半個(gè)周期,驅(qū)動(dòng)裝置通過閉環(huán)控制,能夠跟隨輸出一個(gè)緩慢上升的力矩;力矩下降的半個(gè)周期,驅(qū)動(dòng)裝置無法準(zhǔn)確跟隨電磁力矩的變化,出現(xiàn)圖中曲線不重合的現(xiàn)象。

圖8 擬合曲線和實(shí)測曲線對(duì)比圖
由式(1)可知,步進(jìn)電機(jī)的矩角關(guān)系曲線應(yīng)該關(guān)于角度軸對(duì)稱,而實(shí)測的曲線相當(dāng)于把理論曲線向下平移0.421N·m,其原因有步進(jìn)電機(jī)內(nèi)部結(jié)構(gòu)引起的摩擦力矩,或其他部件摩擦、安裝偏心引起的附加力矩等。
前文提到,保持狀態(tài)下,步進(jìn)電機(jī)矩角關(guān)系的峰值對(duì)應(yīng)的是步進(jìn)電機(jī)的保持力矩,每個(gè)角度周期對(duì)應(yīng)步進(jìn)電機(jī)的齒距角。所以對(duì)矩角關(guān)系測試數(shù)據(jù)稍加整理即可得到步進(jìn)電機(jī)的保持力矩,部分?jǐn)?shù)據(jù)如表1所示。

表1 測試數(shù)據(jù)表(部分?jǐn)?shù)據(jù))
5 結(jié)語
本文針對(duì)保持狀態(tài)下步進(jìn)電機(jī)滿圓周矩角關(guān)系連續(xù)測試的難點(diǎn),提出一種新的測試方法。基于實(shí)時(shí)力矩平衡原理設(shè)計(jì)了步進(jìn)電機(jī)矩角關(guān)系測試系統(tǒng),并對(duì)一臺(tái)兩相混合式步進(jìn)電機(jī)保持狀態(tài)下的矩角關(guān)系進(jìn)行了多次測試。測試結(jié)果表明,驅(qū)動(dòng)裝置能夠?qū)崿F(xiàn)測試方法中穩(wěn)速控制的要求。所得數(shù)據(jù)和理論分析值能夠較一致,驗(yàn)證了方法的正確性。所設(shè)計(jì)的系統(tǒng)工作穩(wěn)定可靠,實(shí)現(xiàn)了保持狀態(tài)下步進(jìn)電機(jī)滿圓周矩角關(guān)系的連續(xù)測試。
[1]尚磊磊,顧永剛,翟超,等.基于LabVIEW的汽車儀表步進(jìn)電機(jī)測試系統(tǒng)[J].電子測量技術(shù),2010,33(12):60-63.Shang Leilei,Gu Yonggang,Zhai Chao,et al.Testing System for Stepper Motor on Auto Meter Based on LabVIEW[J].Electronic Measurement Technology,2010,33(12):60-63.
[2]徐紅偉,胥芳,張任.步進(jìn)電機(jī)速度飽和非線性特性分析[J].中國機(jī)械工程,2011,22(24):2958-2961.Xu Hongwei,Xu Fang,Zhang Ren.Analysis of Stepper Motor Velocity Saturation Nonlinearity[J].China Mechanical Engineering,2011,22(24):2958-2961.
[3]Tsui W-H K,Cheung C N,Yuen C-W K.Novel Modeling and Damping Technique for Hybrid Stepper Motor[J].IEEE Transactions on Industrial Electronics,2009,56(1):202-211.
[4]張文海.步進(jìn)電機(jī)矩角特性的測試[J].微特電機(jī),1999(2):43-44.Zhang Wenhai.The Torque-angle Characteristic Test of Stepper Motor[J].Micro Electronic,1999(2):43-44.
[5]Ghafari A S,Behzad M.Investigation of the Microstep Control Positioning System Performance Affected by Random Input Signals[J].Mechatronics,2005,15(10):1175-1189.
[6]王鳳鳴,劉暾,張鵬順.步進(jìn)電動(dòng)機(jī)驅(qū)動(dòng)撓性負(fù)載時(shí)堵轉(zhuǎn)機(jī)理研究[J].中國機(jī)械工程,2002,13(9):771-773.Wang Fengming,Liu Dun,Zhang Pengshun.The Mechanism Research on Driving Fiexible of Stepper Motor[J].China Mechanical Engineering,2002,13(9):771-773.
[7]斯祝華,劉一武,黎康.太陽帆板驅(qū)動(dòng)裝置建模及其驅(qū)動(dòng)控制研究[J].空間控制技術(shù)與應(yīng)用,2010,36(2):13-19.Si Zhuhua,Liu Yiwu,Li Kang.Research on Modeling and Driver Design of Solar Array Drive Assembly[J].Aerospace Control and Application,2010,36(2):13-19.
[8]肖志權(quán),彭利坤,邢繼峰,等.數(shù)字伺服步進(jìn)液壓缸的建模分析[J].中國機(jī)械工程,2007,18(16):1935-1938.Xiao Zhiquan,Peng Likun,Xing Jifeng,et al.Modeling Analysis of Digital Servo Stepping Hydraulic Cylinder[J].China Mechanical Engineering,2007,18(16):1935-1938.
[9]Pfister P D,Perriard Y.Torque Measurement Methods for Very High Speed Synchronous Motors[C]//International Conferece on Electrical Machines.Vilamoura,Portugal,2008:1-5.
[10]陳寅生.慣性平臺(tái)框架摩擦力矩測試系統(tǒng)研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2011.
