一種步態爬桿機器人的運動分析
2014-12-02 01:40:12孫招陽安卓杜偉明尹建成趙冉
機械工程師 2014年8期
孫招陽,安卓,杜偉明,尹建成,趙冉
(上海電機學院 機械學院,上海 200245)
0 引言
目前,機器人已經應用于工業、國防、農業、辦公自動化、醫療衛生、家庭服務及社會服務等各個方面,而工業機器人技術是我國高新前沿重要技術之一,在我國城鎮化建設高速發展的背景下,各種不同尺寸大小的桿狀結構和建筑得到了廣泛的應用,諸如電線桿、路燈桿、大橋斜拉鋼索、廣告立柱、風力發電桿等,需要攀爬此類桿件進行的高空作業有刷油漆,噴涂料,檢查、維護電力系統,架設電纜等,欲完成這些工作主要由人工和大型設備配合,所以危險系數較高。
1 現有技術發展
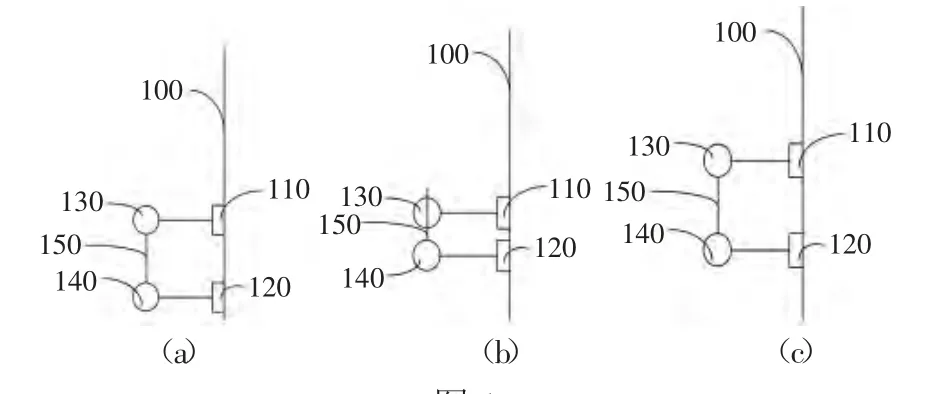
圖1
市場上已擁有多種設計成型的攀爬機器人,這些機器人多數采用尺蠖蠕動的形式來實現爬桿動作,如圖1(a)至1(c)所示,首先,前爪110 固定,第二關節140 推動后爪120 沿桿100 向上滑動,同時滑竿150 在第二關節140 的帶動下穿過第一關節130;然后,第一關節130 推動前爪110 沿桿100 向上滑動,直至前爪110 和后爪120 之間的相對位置恢復初始狀態,完成一步行走,以此類推,完成攀爬動作。受這種攀爬動作原理的限制,這種機器人只能夠低速攀爬豎直的桿且無法攀爬有一定弧度的桿,此外,仿尺蠖蠕動式攀爬機器人只能在光滑的桿體上進行攀爬,無法跨越障礙物,在實際應用中存在不便。當然,在很多精密儀器領域中,也出現了仿人形的機器人,但其結構非常復雜,而且它們都集中表現出效率低、勞動強度大、耗能高、二次污染嚴重等的問題。現在市場已有的爬桿設備也大多受到工作條件和能源輸送的限制,大大制約了其在社會上的推廣和普及應用。
基于此,我們希望通過改變傳統爬桿機器圖1 的攀爬方式,從根本上來改善其所存在的種種不足。傳統的爬桿機器人大都采用仿尺蠖蠕動形式或滾輪驅動式來實現爬桿動作,而我們的研究方案采用的是交替翻轉式步態攀爬原理。整臺機器分為4 個部分——2 個機械手和2 個連桿。全新的攀爬方式不僅能夠使機器人攀爬不同弧度的桿,而且其結構簡單,裝備容易,操作方便,工作效率高,工作狀態穩定,能夠使機器人獲得快速攀爬以及翻越障礙物的能力。
2 步態爬桿機器人的總體設計
本項目設計了一種靠步態方式攀爬的機器人,如圖2所示,這種步態爬桿機器人主要由上夾持手、下夾持手、上腕部轉動關節、下腕部轉動關節、臂部轉動關節組成。
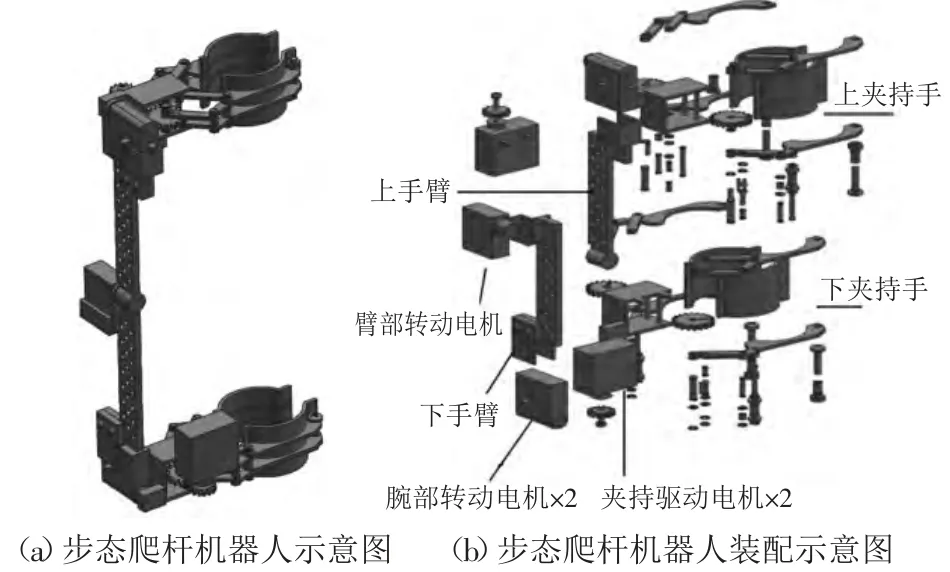
圖2
該步態爬桿機器人設計以5 個舵機作為傳動與行走的主要動力,其中夾持驅動電機安裝在夾持手的夾持手架上。
3 步態行走方式
如圖3 所示。第一步:下夾持手松開所爬桿件;第二步:下腕部轉動關節逆時針旋轉90°;第三步:上腕部關節逆時針轉動180°,與此同時,臂部關節順時針轉動90°~145°(臂部關節的轉動需與上腕部關節的轉動同時開始并同時結束);第四步:下夾持手夾緊所爬桿件;至此一次邁步(即半個周期行走)完成。第五步:上夾持手松開所爬桿件;第六步:上腕部關節逆時針轉動90°;第七步:臂部關節順時針轉動90°~145°(臂部關節的轉動需與所述下腕部關節的轉動同時開始并同時結束);第八步:上夾持手夾緊所爬桿件,此時狀態與初始狀態相同;至此二次邁步(即一個周期行走)完成。然后,重復第一步~第八步,直至機器人到達指定位置。
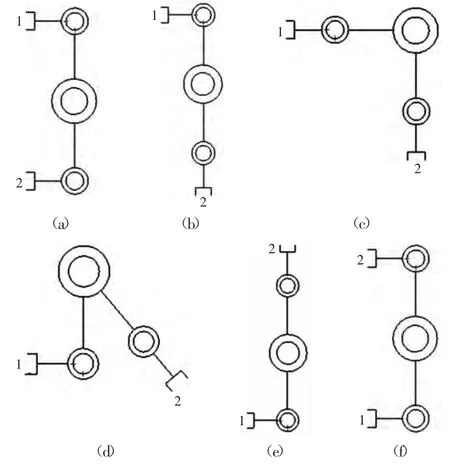
圖3
4 結語
本文提出的裝置及運動方式通過改變傳統爬桿機器人的攀爬方式,可從根本上改善其所存在的種種不足。采用了交替翻轉式步態攀爬原理,整臺機器分為4 個部分——2 個機械手和2 個連桿。全新的攀爬方式不僅能夠使機器人攀爬不同弧度的桿,而且其結構簡單,裝備容易,操作方便,工作效率高,工作狀態穩定,能夠使機器人獲得快速攀爬以及翻越障礙物的能力。因此本爬桿運動方式及設備具有較高的推廣價值和應用前景。
[1]濮良貴,陳國定.機械設計[M].北京:高等教育出版社,2012.
[2]陸明炯.實用機械工程材料手冊[M].沈陽:遼寧科學技術出版社,2004.
[3]于慧力.機械設計學習指導[M].北京:科學出版社,2008.
[4]郭洪紅.工業機器人技術[M].2 版.西安:西安電子科技大學出版社,2006.
[5]劉鴻文.材料力學[M].北京:高等教育出版社,2004.
[6]張毅剛.單片機原理及應用[M].北京:高等教育出版社,2010.
