提撈式抽油機研究與分析
2014-12-02 01:39:36孫祥謝勁松
機械工程師 2014年9期
孫祥,謝勁松
(長春理工大學,長春 130022)
0 引言
智能提撈式抽油機與傳統抽油機最大的不同是將剛性抽油桿換成連續柔性抽油桿,以超大沖程代替小沖程。此種抽油機克服了傳統抽油機供液不足情況下“干抽”的難題,克服了傳統抽油機能耗大效率低的缺點[1]。該項技術目前已在大慶油田、勝利油田、吉林油田、遼河油田試驗成功并開始推廣,取得了良好的效果。
1 智能提撈式抽油機的基本結構
智能提撈式抽油機作為一種完全區別于傳統抽油機的新型抽油系統[2],主要由地上智能主機部分和地下抽油部分組成。地上智能主機部分主要包括電控箱、電動機、擺線針輪減速機、制動器、鏈傳動機構、里巴斯滾筒、自動排繩機構、設備支架、井架、滑輪等;地下部分主要包括連續柔性抽油桿、加重桿、壓力傳感器、柱塞、油管等。結構如圖1 所示。
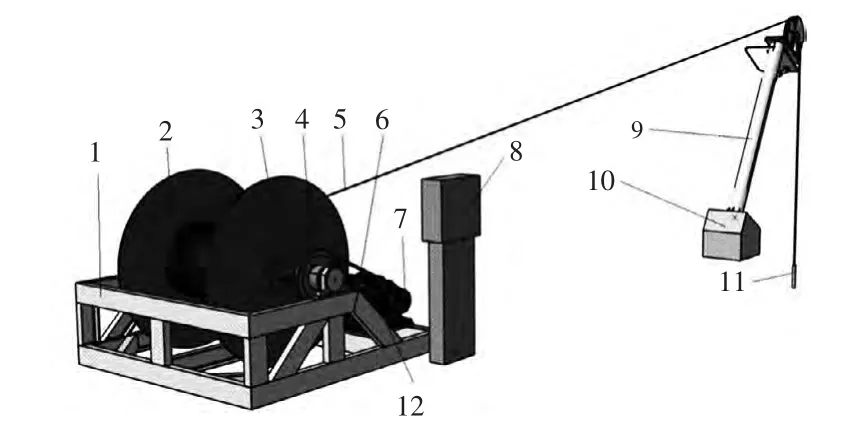
圖1 智能提撈式抽油機結構示意圖
2 工作原理簡介
連續柔性抽油桿將設備的里巴斯滾筒和柱塞連接在一起,借鑒傳統提撈式抽油原理,以油井整體管柱為抽油泵筒,通過滾筒的正反轉帶動柱塞上下運動,完成抽汲過程[3~4]。
當上行抽油時,電動機正轉,在設定的速度下,里巴斯滾筒將連續柔性抽油桿纏繞在卷筒上的同時帶動柱塞上行。柱塞上行時柱塞膠筒下滑至柱塞桿柱下端,將柱塞以上液柱封死不漏失。柱塞上行壓縮柱塞以上的液柱和氣體,當壓力達到足以推開集油管線的單向閥時,液體經集油管線進入泵站。當柱塞運行至上死點時電控箱的控制系統感應到信號,控制制動器制動,設備自動停止運行,等待控制信號下放,以保護柱塞不觸及井口密封器,避免井口密封器的損壞或者是由于拉力過大而使柱塞與柔性抽油桿脫離。
當柱塞下行時,電動機反轉,制動器開啟,依靠加重桿、連續柔性抽油桿、柱塞的自重帶動滾筒旋轉。柱塞膠筒滑至柱塞桿柱的上端,柱塞打開,液體沿著柱塞桿柱上的凹槽倒注入柱塞。當柱塞運行至下死點時,制動器制動,根據壓力傳感器反饋的信號決定是否上行,若液柱高度沒達到設定值,則停機等待液面恢復之后自動起機進行上行抽汲。
3 柱塞膠筒受力分析
膠筒是核心部分,對抽油起著至關重要的作用,因此有必要對其進行受力分析,研究其磨損變形問題。膠筒在井下同時受到液柱的壓力和油管的摩擦力的作用。
3.1 液體壓力計算

P 為膠筒所受壓強,MPa;P0為井口油壓,MPa;ρl為液體密度,kg/m3;Hs為舉升液體的高度,m;Hd為膠筒底部液面高度,m;Ht為油套環空液面高度,m;Pt為套壓,MPa。

Fh為膠筒所受壓力,N;dy為油管內徑,mm;dr為柔性抽油桿外徑,mm。由式(1)、式(2)可知膠筒所受壓力與舉升液體的高度成線性關系。
3.2 摩擦力計算
在ANSYS Workbench中進行網格劃分如圖2 所示,網格尺寸限制在2 mm以下,由于膠筒為環形結構,為了效果更均勻對稱,網格以六面體網格為主。
將膠筒在它的軸線方向(z 方向)上分成N 段,單一小段的高為hn=hz+1-hz。hn為每段的高度;hz+1和hz為該段上下兩個取樣點的坐標值;
每一小段受到的摩擦力fn=μ×π×Djt×hn×fz。
式中:fn為每一小段受到的摩擦力,N;Djt為膠筒與油管接觸面的最大直徑,mm;fz為采樣點的應力,N;μ 為摩擦因數,取0.1。
則由變形擠壓產生的摩擦力計算公式為
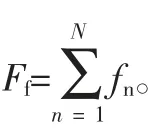

圖2 膠筒網格劃分
Ff為膠筒與油管之間的摩擦力,N。
對以上數據在MATLAB 中進行曲線擬合,
由擬合曲線知摩擦力與液柱高度也呈線性關系。
磨損量計算公式:V=fm×Ff×l
式中:V 為磨損量;fm為磨損因數;l 為摩擦力作用距離。
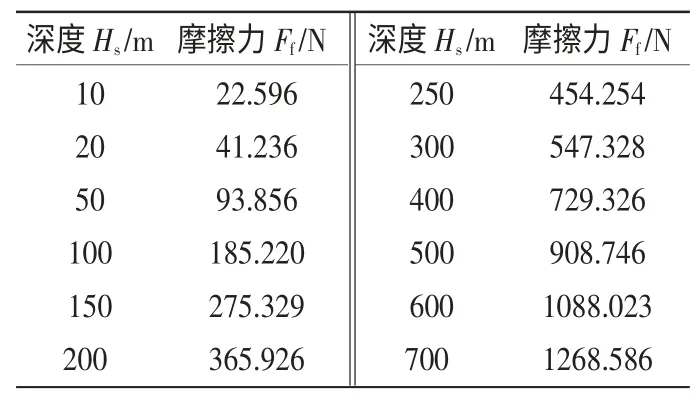
表1 不同液柱高度對應的摩擦力
磨損量分別與液柱高度和摩擦力作用距離成正比,對于不同油井需根據其產液量具體分析,以使磨損量和耗電量同時最少。已實驗成功的油井,柱塞下放至1 150 m至1 250 m,每次提升0.9 方,節電率達到80%。柱塞膠筒40 天左右更換一次。
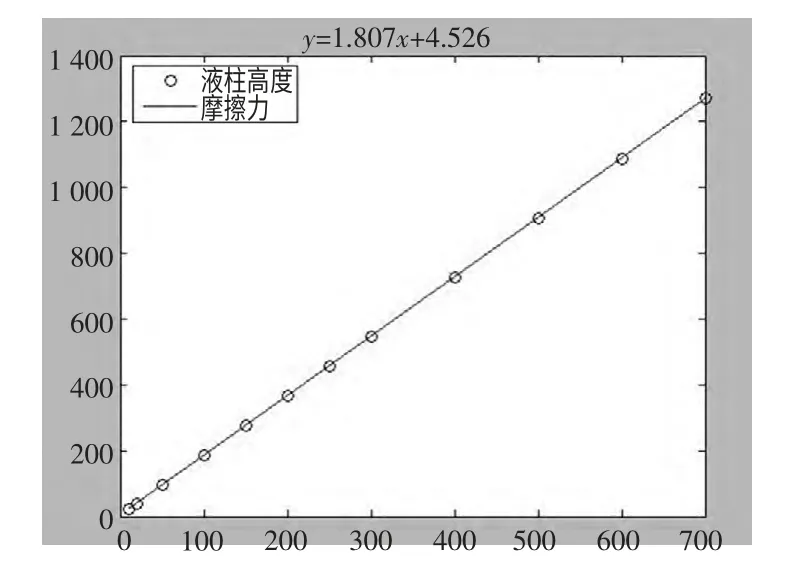
圖3 擬合曲線
4 耗電量分析
傳統抽油機能耗分析:Pe1=(Q·H·Pl·g)/86400。
Pe1為傳統抽油機有效功率,kW;ρl為液體密度,kg/m3;Q 為油井日產液量,m3;H 為有效揚程m;g 為重力加速度,9.8 N/kg。其中有效揚程計算公式:

Hj為井口動液面深度,m;Pt為井口套壓,MPa提撈式撈油機能耗分析:

式中:Pe2為智能撈油機有效功率,kW;hs為舉升液體高度,m;hr為柱塞達到上死點時距井口距離,m。
以兩口實驗井為例,在相同產液量Q 條件下作對比,見表2。
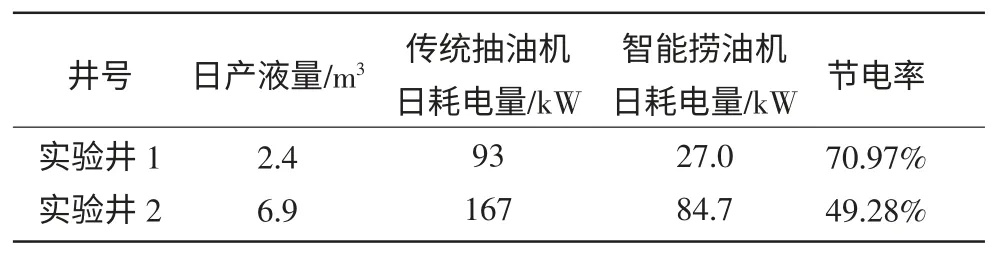
表2 兩口實驗井節電率對比
5 結語
通過技術創新,提撈式抽油機的性能有了明顯改進,在提高了系統工作效率的同時也達到了節能降耗的目的,為低產井降低成本提供了一條新途徑,有著廣泛的應用前景。但目前智能提撈式抽油機在我國仍處在發展階段,多項技術尚不成熟,仍需在膠筒材質、抽油桿連接、井口密封等方面加強攻關,力爭有新的突破。
[1]王峰,靜恩志.我國柔性抽油桿的應用及發展[J].金屬制品,2001(1):48-49.
[2]李偉.柔性連續抽油桿提撈式采油技術研究[D].沈陽:東北石油大學,2011.
[3]王春華,祝立群,張永功,等.新型固定式撈油機[J].油氣田地面工程,2007,26(2):61.
[4]席明元.智能抽油機舉升技術應用[J].內蒙古石油化工,2013(7):103-104.
猜你喜歡
石油石化節能(2022年12期)2022-12-30 04:45:02
設備管理與維修(2022年21期)2022-12-28 07:35:42
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
計算機測量與控制(2017年6期)2017-07-01 16:24:20
中國煤層氣(2014年6期)2014-08-07 03:07:05
