輪式移動機(jī)器人車輪牽引性能離散元仿真*
2014-11-26 03:12:18劉吉成華凌云江盼閣
機(jī)械制造 2014年8期
關(guān)鍵詞:模型
□ 劉吉成 □ 李 斌 □ 華凌云 □ 江盼閣
上海大學(xué) 機(jī)電工程與自動化學(xué)院 上海 200072
輪式移動機(jī)器人在松軟的路面運(yùn)動時,車輪極易產(chǎn)生滑轉(zhuǎn)下陷,而車輪的牽引性能對機(jī)器人動力性、通過性具有重要影響,因此,深入分析車輪與松軟地面之間的關(guān)系,對于研究輪式移動機(jī)器人的運(yùn)動性能具有重要意義[1-3]。
輪-地接觸實(shí)驗(yàn)工作量大,對諸多參數(shù)要求高,而仿真分析可以避免實(shí)驗(yàn)中的諸多不便。張銳、李建橋[4]通過將離散元分析軟件和CAD軟件結(jié)合,有效地模擬了各種復(fù)雜結(jié)構(gòu)車輪、車輪行駛條件以及不同表面工作環(huán)境下的車輪/模擬沙土相互作用關(guān)系,并通過車輪運(yùn)動性能測試平臺實(shí)驗(yàn)獲得驗(yàn)證。孫鵬、崔燚[5]采用離散元法分析梯形齒車輪在松軟沙土表面的通過性,提出不規(guī)則形狀顆粒群系統(tǒng)的離散元建模技術(shù),建立了車輪牽引性能參數(shù)的細(xì)觀表達(dá)式。高峰、李雯[6]用離散元方法模擬了低重力環(huán)境下的輪-地交互作用,推導(dǎo)出沙土推力的細(xì)觀表達(dá)式,定量分析模擬沙土的可行駛性。 此外,國外學(xué)者也做了大量研究,Lav R Khot[7]等采用離散元法研究輪-地接觸時沙土的變形特性,并用土槽實(shí)驗(yàn)驗(yàn)證了仿真結(jié)果。H Nakashina[8-9]等采用離散元方法預(yù)測車輪在不同滑轉(zhuǎn)率下的牽引力和能夠爬行的最大坡度,其仿真結(jié)果與實(shí)驗(yàn)結(jié)果具有良好的一致性。
本文利用離散元法對車輪的滾動性能進(jìn)行分析,建立仿真分析模型,分析車輪與沙土顆粒接觸時的應(yīng)力分布及運(yùn)動特性。
1 輪-地接觸離散單元相互作用力學(xué)模型
離散元法將顆粒對象看作一系列離散的獨(dú)立運(yùn)動單元,單元之間以一定的接觸力學(xué)模型構(gòu)成,其運(yùn)動由經(jīng)典的牛頓第二定律控制。將研究對象離散成許多剛性圓盤或球形顆粒組成的試樣,通過控制單個顆粒的運(yùn)動以及顆粒之間的相互力,用顯式時步迭代的方法,求解各個顆粒隨時間的運(yùn)動,以得到整個試樣的力與變形規(guī)律[10]。相互接觸的兩個顆粒間的典型接觸力學(xué)模型可以認(rèn)為是由雙彈簧-阻尼系統(tǒng)與切向摩擦力構(gòu)成,如圖1所示。
圖 1 中 ,Kn和Ks分別為法向接觸剛度和切向接觸剛度,cn和 cs分別為法向接觸阻尼系數(shù)和切向接觸阻尼系數(shù),fμ是摩擦因數(shù)。需要注意的是Kn為與總位移和力有關(guān)的正割模數(shù),而Ks是與位移增量和力有關(guān)的正切模數(shù),其中,cn和cs可以表示為:
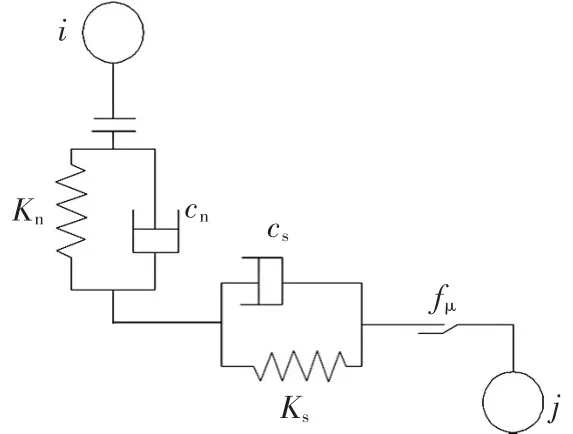
▲圖1 離散元接觸力學(xué)模型

2 車輪牽引性能仿真模型的建立
2.1 仿真參數(shù)
仿真模型的建立過程為:①確定顆粒的基本參數(shù)及接觸參數(shù);②生成土槽模型,并使顆粒達(dá)到自平衡狀態(tài);③生成車輪模型;④將車輪模型與土槽模型組合到一起,加入車輪驅(qū)動參數(shù),開始仿真,輸出必要的測量參數(shù)值。仿真模型參數(shù)見表1。
2.2 土槽建模
建立仿真模型時,二維顆粒離散元主要有兩種幾何元素,即球(Ball)和墻(Wall)。球體現(xiàn)為一個圓,被認(rèn)為是剛體性,球與球之間通過點(diǎn)接觸。墻體現(xiàn)為沒有厚度的線,分為標(biāo)準(zhǔn)墻與一般墻。標(biāo)準(zhǔn)墻主要體現(xiàn)為一條直線,標(biāo)準(zhǔn)墻的一側(cè)是激活的,即只有激活的一側(cè)墻才可以與球接觸產(chǎn)生作用力,標(biāo)準(zhǔn)墻可以用來模擬實(shí)際土槽的外壁。
本文以標(biāo)準(zhǔn)墻屬性建立土槽的外圍邊界,土槽長0.8 m,高0.275 m。以球的指令生成模擬沙土顆粒。設(shè)定顆粒的最小半徑為rmin=0.9 mm,最大半徑為rmax=1.1 rmin,孔隙率為0.59,生成土槽的程序流程如圖2所示。

表1 離散元仿真分析模型沙土參數(shù)

▲圖2 土槽生成流程圖
2.3 車輪建模
車輪模型包括光輪與帶有齒片的車輪,本文采用墻的屬性建立車輪模型。以一般墻模擬光輪,以標(biāo)準(zhǔn)墻模擬齒片,如圖3所示。同時為了真實(shí)反映齒片與沙土直接作用狀態(tài),每個齒片采用起始點(diǎn)相反的兩條標(biāo)準(zhǔn)墻模擬齒片。標(biāo)準(zhǔn)墻起始點(diǎn)的不同決定了墻激活面的方向,采用這種方式建立齒片模型,可以保證齒片的兩個側(cè)面均為激活面,真實(shí)反映齒片與沙土的相互作用。

▲圖3 墻命令生成的車輪及齒片模型
2.4 車輪滾動性能仿真
車輪滾動性能仿真模型如圖4所示。X軸正方向?yàn)檐囕喦斑M(jìn)方向,土槽長0.8 m,高0.275 m,配置4層不同參數(shù)的沙土顆粒。設(shè)置作用于車輪上的載荷W=80 N,重力加速度取9.8 m/s2。設(shè)定光輪直徑為0.27 m,齒片高度Lh分別為5 mm和10 mm,齒片間隔角度Ls=18°,齒片寬度為 7 mm。
由于車輪模型采用墻的方式建立,載荷不能直接施加到車輪上。在仿真過程中,依靠程序循環(huán)采集車輪與沙土間相互力的垂直分量,并不斷與載荷大小進(jìn)行對比來反映車輪的滾動狀態(tài)。當(dāng)垂直分力小于載荷時,車輪在X方向上的移動速度及轉(zhuǎn)動角速度為零,設(shè)定車輪在豎直方向上的速度為-0.01 m/s,此時車輪沉陷;當(dāng)垂直分力大于載荷時,車輪Y方向上的速度為零,設(shè)定X方向上的移動速度為0.01 m/s,此時車輪滾動前進(jìn)。同時,給定車輪預(yù)期停止?jié)L動時的位移動,并實(shí)時采集車輪的實(shí)際位移,當(dāng)實(shí)際位移大于預(yù)定位移時,程序自動結(jié)束仿真。此時,輸出車輪的位移信息、豎直方向的力、掛鉤牽引力及驅(qū)動轉(zhuǎn)矩,并保存該仿真分析過程文件*.sav,仿真流程步驟如圖5所示。
3 車輪牽引性能離散元仿真結(jié)果分析
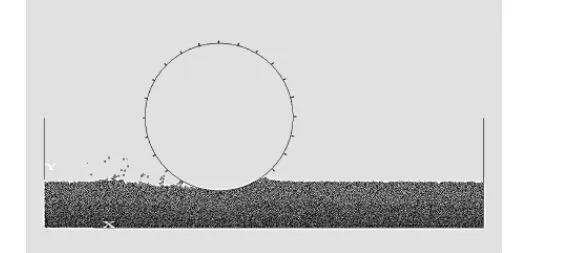
▲圖4 車輪滾動性能仿真模型
圖6 和圖7為負(fù)載W=80 N、齒片間隔角度Ls=18°、齒片高度Lh分別為5mm和10mm時,車輪產(chǎn)生的掛鉤牽引力PD與驅(qū)動轉(zhuǎn)矩Tr的離散元仿真結(jié)果。
由圖6可知,掛鉤牽引力PD和驅(qū)動轉(zhuǎn)矩Tr隨著滑轉(zhuǎn)率的增加而逐漸增大。
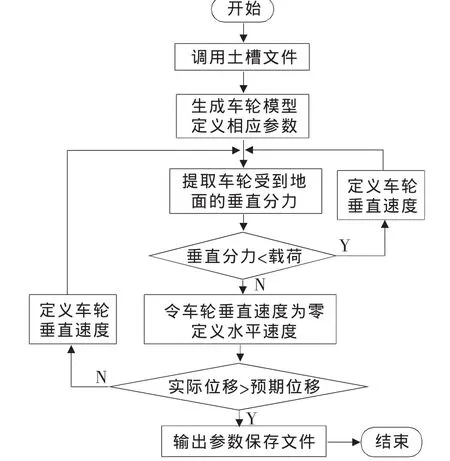
▲圖5 車輪滾動性能仿真流程
由圖7可知,掛鉤牽引力PD和驅(qū)動轉(zhuǎn)矩Tr隨著滑轉(zhuǎn)率的增加而逐漸增大。且與圖6對比可知,齒片高度Lh由5 mm增加到10 mm時,掛鉤牽引力PD與驅(qū)動轉(zhuǎn)矩Tr顯著增加。
4 結(jié)論
通過研究輪-地接觸特性離散元法模擬仿真的機(jī)理及離散單元間相互作用的力學(xué)模型,建立車輪牽引性能仿真分析的模型。車輪滾動性能仿真結(jié)果直觀反映出車輪對沙土顆粒的擾動狀態(tài),得到車輪與沙土顆粒接觸時的運(yùn)動特性關(guān)系。
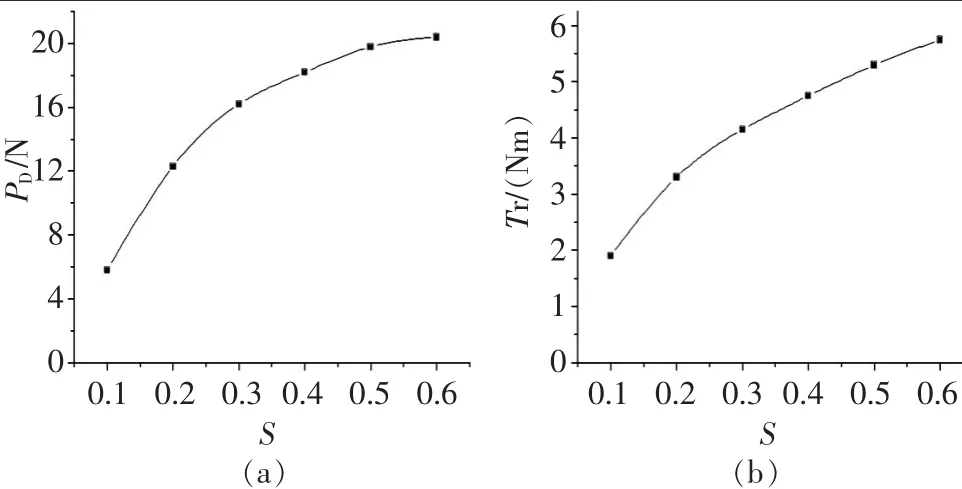
▲圖6 Ls=18°Lh=5 mm時滑轉(zhuǎn)率S對掛鉤牽引力PD和驅(qū)動轉(zhuǎn)矩Tr影響的仿真結(jié)果

▲圖7 Ls=18°Lh=10 mm時滑轉(zhuǎn)率S對掛鉤牽引力PD和驅(qū)動轉(zhuǎn)矩Tr影響的仿真結(jié)果
[1] 谷侃鋒,趙明揚(yáng).輪式移動機(jī)器人沙地行駛控制建模與仿真研究[J].系統(tǒng)仿真學(xué)報,2008,20(18).
[2] 鄒猛.月球探測車輛驅(qū)動輪牽引性能研究[D].長春:吉林大學(xué),2008.
[3] 莊繼德.計(jì)算汽車地面力學(xué)[M].北京:機(jī)械工業(yè)出版社,2002.
[4] 張銳,李建橋.非規(guī)則車輪散體模擬月壤相互作用仿真系統(tǒng)研究[C].張家界:2012顆粒材料計(jì)算力學(xué)會議,2009.
[5] 孫鵬,崔燚.梯形齒車輪月面牽引性能的離散元分析[J].北京航空航天大學(xué)學(xué)報,2010,36(3):253-256.
[6] 高峰,李雯.模擬月壤可行駛性的離散元數(shù)值分析[J].北京航空航天大學(xué)學(xué)報,2009,35(4):501-504.
[7] Lav R Khot,Vilas M Salokhe.Experimental Validation of Distinct Element Simulation for Dynamic Wheelsoil Interaction[J].Journal of Terramechanics,2007,44:429-437.
[8] H Nakashina,H Fujii.Parametric Analysis of Lugged Wheel Performance for a Lunar Microrover by Means of DEM [J].Journal of Terramechanics,2007,44:153-162.
[9] H Nakashina,H Fujii.Discrete Element Method Analysis of Single Wheel Performance for a Small Lunar Rover on Sloped Terrain [J].Journal of Terramechanics,2010,47:307-321.
[10]劉一鳴,楊春和.考慮轉(zhuǎn)動阻抗的粗粒土離散元模擬[J].巖土力學(xué),2013,34(增刊 1):486-493.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
