漏感對非隔離高效推挽變換器的影響
2014-11-25 09:24:56鄭瓊林邵天驄
電工技術學報 2014年4期
陳 騫 鄭瓊林 李 艷 邵天驄
(北京交通大學電氣工程學院 北京 100044)
1 引言
功率調節器(PCU)是衛星電源系統的核心組成部分,它由主誤差放大器(MEA)、分流調節器(SAR)、蓄電池充電調節器(BCR)、蓄電池放電調節器(BDR)和相應的遙測/遙控(TM/TC)單元組成[1-3]。其中BDR 與BCR 均為DC-DC 變換器。由于具有效率高、控制系統易于設計以及輸入輸出電流連續等優勢,非隔離高效推挽變換器被廣泛應用于BDR 與BCR 中。
所謂非隔離高效推挽變換器指的是輸入和輸出側電流在任意時刻均大于零的推挽變換器。通過調整變壓器或耦合電感的匝比,非隔離高效推挽變換器可實現一側電流在開關管開通時的平均值等于關斷時的平均值,本文中稱此電流為低紋波電流。PCU可以等效為基于三域控制的壓控電流源,通過控制BCR、BDR 以及SAR 的母線側電流穩定母線電壓,這就要求BCR、BDR 母線側電流為低紋波以利于電流采樣[4]。
目前Weinberg 拓撲已經應用于多個型號PCU的BDR 中[5-8],它屬于非隔離高效推挽類拓撲,其輸出電流雖然為低紋波,但有尖峰,文獻[9]已對這一現象進行了定性解釋,然而電流尖峰的定量分析及其影響在文獻中均未說明。非隔離高效推挽類拓撲的低紋波側電流均含尖峰,這是由漏感存儲的能量瞬間釋放所致。該電流尖峰直接影響到主電路器件選型、電流采樣以及遙測的準確性,因此需要重點分析。
本文根據非隔離高效推挽類拓撲低紋波電流的不同尖峰特性,將其分成三類,并從中提取出三種具有代表性的拓撲對低紋波側電流尖峰進行定量分析,得到影響電流尖峰幅值和持續時間的主要因素。針對每種拓撲各自的特點,分別提出與之相適應的等效電流采樣方法,并分析由之帶來的電流采樣誤差的問題。
2 尖峰特性的分類
非隔離高效推挽拓撲如圖1 所示,一共有20種拓撲。這些拓撲的命名方式如下:首位表示推挽單元的類型,非隔離高效推挽變換器共有四種推挽單元,分別命名為Ⅰ、Ⅱ、Ⅲ、Ⅳ;第二位表示電感的類型,單電感表示為s,耦合電感表示為c;對于單電感拓撲第三位表示其排序,對于耦合電感拓撲第三位表示耦合電感的連接方式,正接為a,反接為b;對于耦合電感拓撲第四位表示其排序。根據輸出側低紋波電流的不同尖峰特性,可將拓撲分為三類。
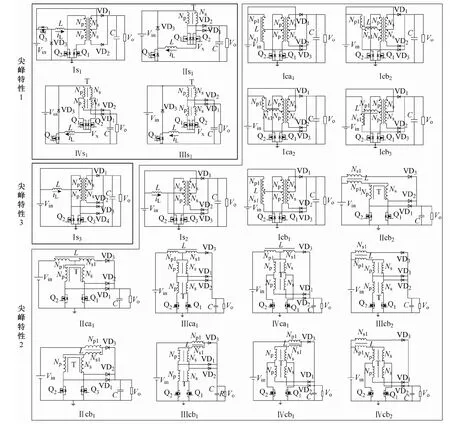
圖1 非隔離高效推挽變換器Fig.1 Non-isolated push-pull converter with high efficiency
尖峰特性1:輸出低紋波電流有負向尖峰。含有此類尖峰特性的拓撲包含Ⅰs1、Ⅱs1、Ⅲs1、Ⅳs1。
尖峰特性2:輸出低紋波電流有正向尖峰。含有此類尖峰特性的拓撲包含Ⅰca1、Ⅱca1、Ⅲca1、Ⅳca1、Ⅱcb1、Ⅲcb1、Ⅳcb1、Ⅰcb3、Ⅱcb2、Ⅲcb2、Ⅳcb2、Ⅰs2、Ⅰca2、Ⅰcb1、Ⅰcb2。
尖峰特性3:輸出低紋波電流同時有正、負向尖峰,且正向尖峰出現在開關關斷時刻,負向尖峰出現在開關導通時刻。含有此類尖峰特性的拓撲包含Ⅰs3。
3 三種拓撲電流尖峰的分析
下面以Ⅱcb2、Ⅱs1和Ⅰs3三種拓撲為例分析三種尖峰特性。本文將變壓器繞組電壓的正方向定義為同名端為+,異名端為-;電流正方向定義為流入同名端為+。由于匝比為1,因此各個繞組的漏感和電壓均相等,即LT1=LT2=LT3=LT4=LT,vT1=vT2=vT3=vT4=vT,如圖2 所示。
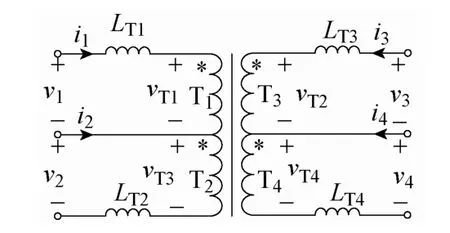
圖2 變壓器電壓電流正方向Fig.2 Positive direction of voltage and current for transformer
當磁阻接近于零時

3.1 拓撲Ⅱcb2
圖3 中的拓撲Ⅱcb2考慮了變壓器的勵磁電感、漏感以及耦合電感的勵磁電感、漏感的影響。耦合電感的一二次漏感可分別表示為
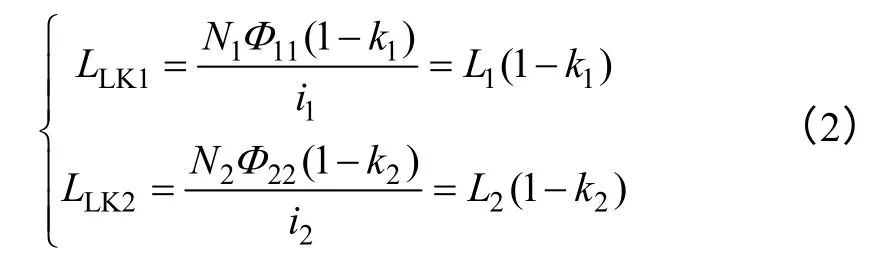
式中,L1、L2分別為耦合電感一次、二次自感。
拓撲Ⅱcb2的電流波形如圖4 所示。輸出電流正向尖峰出現在MOS 管由導通轉為關斷的瞬態,該瞬態包含兩個階段:階段1 從Q1開始關斷起始到Q1完全關斷終止,階段2 從Q1完全關斷開始到二極管VD3電流達到穩態終止。
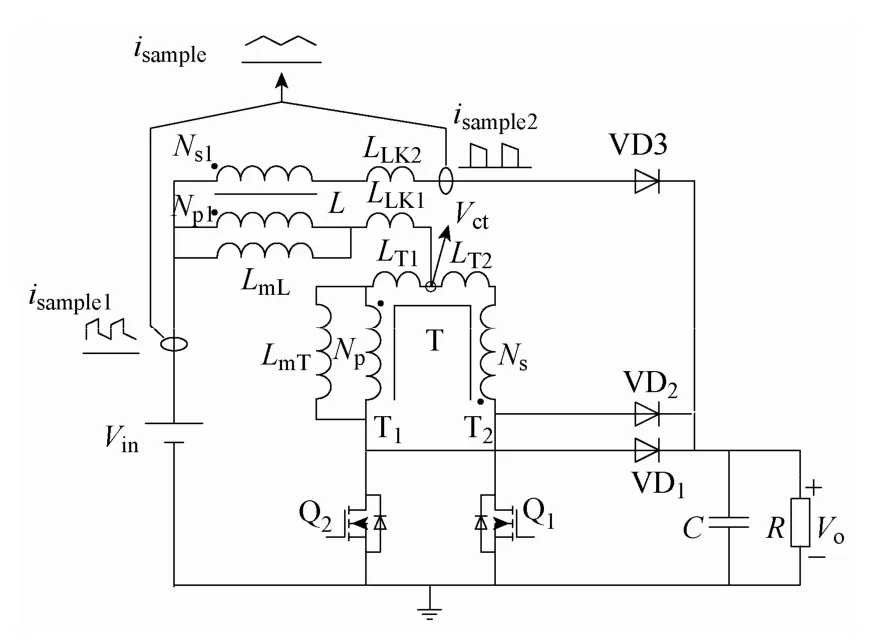
圖3 考慮勵磁電感和漏感的拓撲Ⅱcb2Fig.3 Topology Ⅱcb2with magnetic inductance and leakage inductance
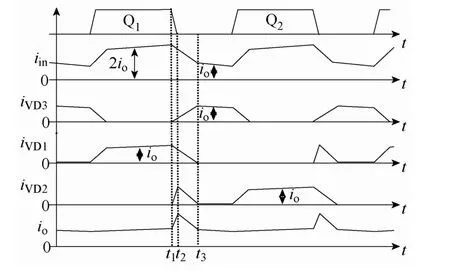
圖4 拓撲Ⅱcb2的電流波形Fig.4 Key current waveforms of topology Ⅱcb2
根據式(1)并結合拓撲Ⅱcb2的特點可得

拓撲Ⅱcb2的輸入電流與二極管VD3的電流之和等于不含尖峰的輸出電流的兩倍,因此可以得到

t1~t2時刻對應階段1,該階段的等效電路如圖5a 所示。t1時刻,流過Q1的電流等于輸出電流io,流過VD2的電流等于零。隨著Q1逐漸關斷,流過Q1、VD1的電流從io開始下降,流過VD3、VD2的電流從零開始上升。在t2時刻輸出電流達到最大。
t2~t3時刻對應階段2,該階段的等效電路如圖5b 所示。此時VD3、VD1、VD2均導通,其中iVD3逐漸上升,iVD1、iVD2逐漸下降,直至t3時刻到達穩態,此時VD1、VD2完全關斷,VD3的電流為io。
變壓器的漏感端電壓為

由于耦合電感匝比為0.5,所以二次漏感值為一次漏感的4 倍,即,此時耦合電感的漏感端電壓為

列寫回路方程可得

將式(5)、式(6)代入式(7),并化簡可得

在階段2,iQ1=iQ2=0,根據式(3)、式(4),可得

將式(9)代入式(8)

在t1~t3時刻iVD3的變化量為io,可得正向峰值電流持續時間

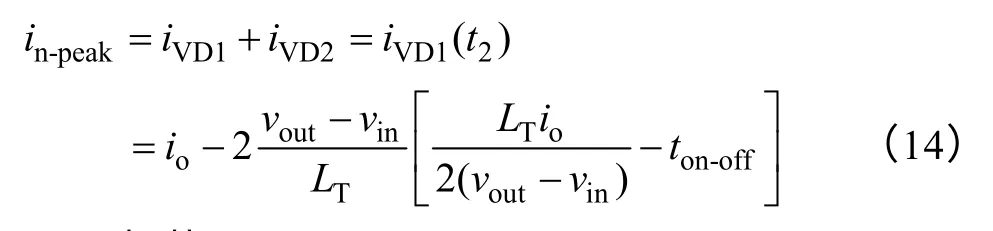
電流正向尖峰可以表示為

式中,t2-t1等于MOS 管的瞬態關斷時間ton-off。
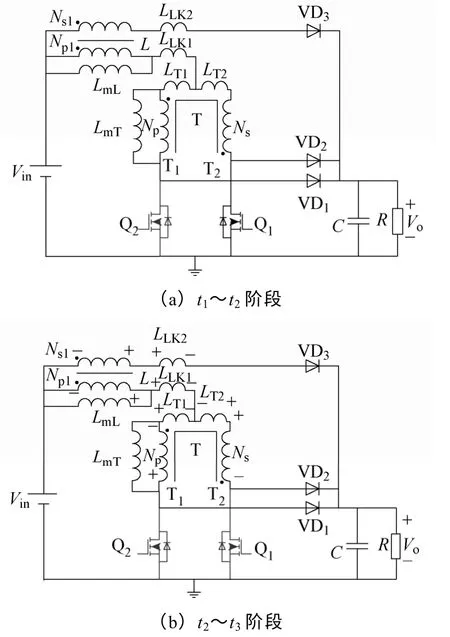
圖5 拓撲Ⅱcb2的等效電路Fig.5 Equivalent circuit of topology Ⅱcb2
3.2 拓撲Ⅱs1
圖6 中的拓撲Ⅱs1屬于電流型推挽拓撲,為保持電感的電流回路,Q1、Q2不許有死區,因此一般將Q1、Q2驅動信號的占空比設置為略大于0.5,相位相差180o。當Q1、Q2重疊導通時,輸出電流存在負向尖峰,該拓撲的電流波形如圖7 所示。
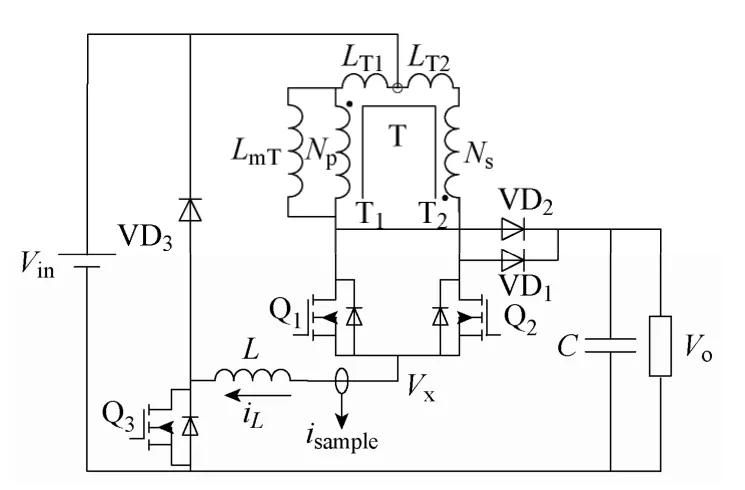
圖6 考慮勵磁電感和漏感的拓撲Ⅱs1Fig.6 Topology Ⅱs1with magnetic inductance and leakage inductance
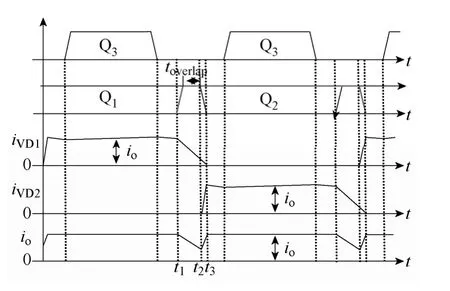
圖7 拓撲Ⅱs1的電流波形Fig.7 Key waveforms of topology Ⅱs1
負向電流尖峰可分為t1~t2和t2~t3兩個階段分析。t1~t2階段的等效電路如圖8a 所示,在此階段Q1、Q2同時導通,流過VD1的電流逐漸下降,在t2時刻輸出電流達到最小。t2~t3階段的等效電路如圖8b 所示,此時Q1、Q2、VD1、VD2均導通,在t3時刻iVD1下降至零,iVD2達到穩態。
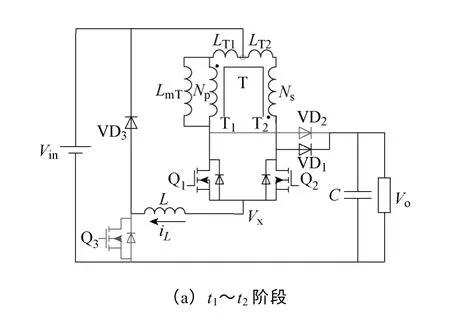
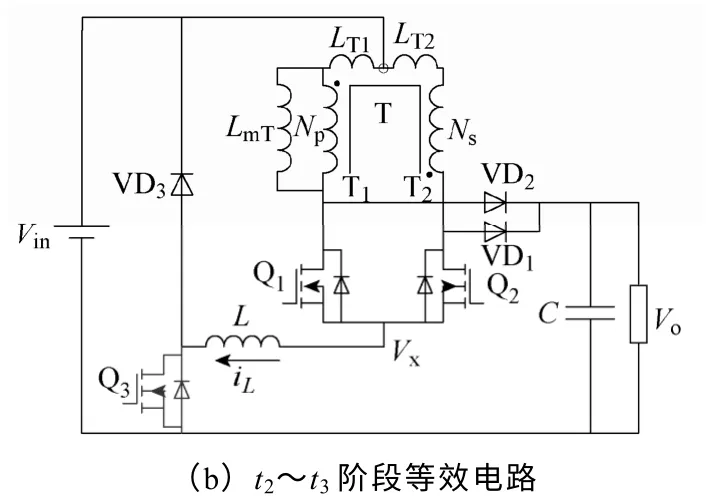
圖8 拓撲Ⅱs1的等效電路Fig.8 Equivalent circuit of topology Ⅱs1
在t1~t3時刻iVD1的變化量為io,負向尖峰電流的持續時間

輸出電流在t2時刻達到最小,此時電流負向尖峰可以表示為
3.3 拓撲Ⅰs3
拓撲Ⅰs3如圖9 所示。當變壓器匝比為1 時輸出電流為低紋波。在MOS 管關斷的瞬態過程中,輸出電流產生正向尖峰;在MOS 管開通的瞬態過程中,輸出電流產生負向尖峰,如圖10 所示。
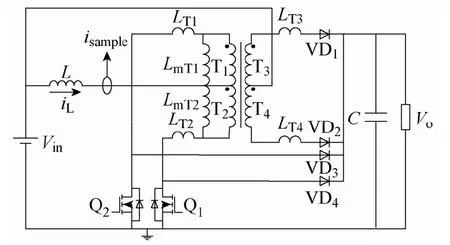
圖9 考慮勵磁電感和漏感的拓撲Ⅰs3Fig.9 TopologyⅠs3with magnetic inductance and leakage inductance
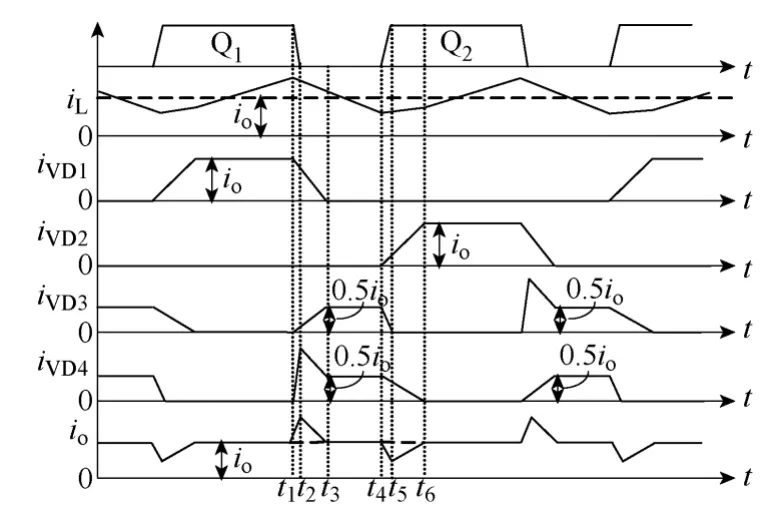
圖10 拓撲Ⅰs3的電流波形Fig.10 Key current waveforms of topologyⅠs3
產生正向電流尖峰的瞬態可以分為兩個階段:t1~t2階段MOS 管由導通至完全關斷,t2~t3階段二極管VD1由導通至完全截止。
t1~t2階段VD1開始截止,VD3、VD4開始導通,L 開始放電。等效電路如圖11a 所示。由于電感右端電位高于左端電位,因此電感電流通過 T1、T2繞組續流而不通過T3、T4續流。t1時刻,流過T2繞組的電流等于電感電流iL,流過T1繞組的電流等于零。隨著Q1逐漸關斷,流過T2的電流從電感電流開始下降,流過T1的電流從零開始上升,直至兩者電流均為0.5iL時達到穩定,此時流過Q1的電流降為零,iT2=iVD4。由于Q1的瞬態關斷時間相對于T1、T2電流達到穩態的時間短很多,在t2時刻Q1已關斷,但流過T1、T2的電流還未達到穩態,此時輸出電流達到最大。
t2~t3階段VD1、VD3、VD4均導通,其中iVD3逐漸上升,iVD4、iVD1逐漸下降,直至t3時刻到達穩態,此時VD1完全截止,VD3、VD4的電流相等,均為0.5io。等效電路如圖11b 所示。
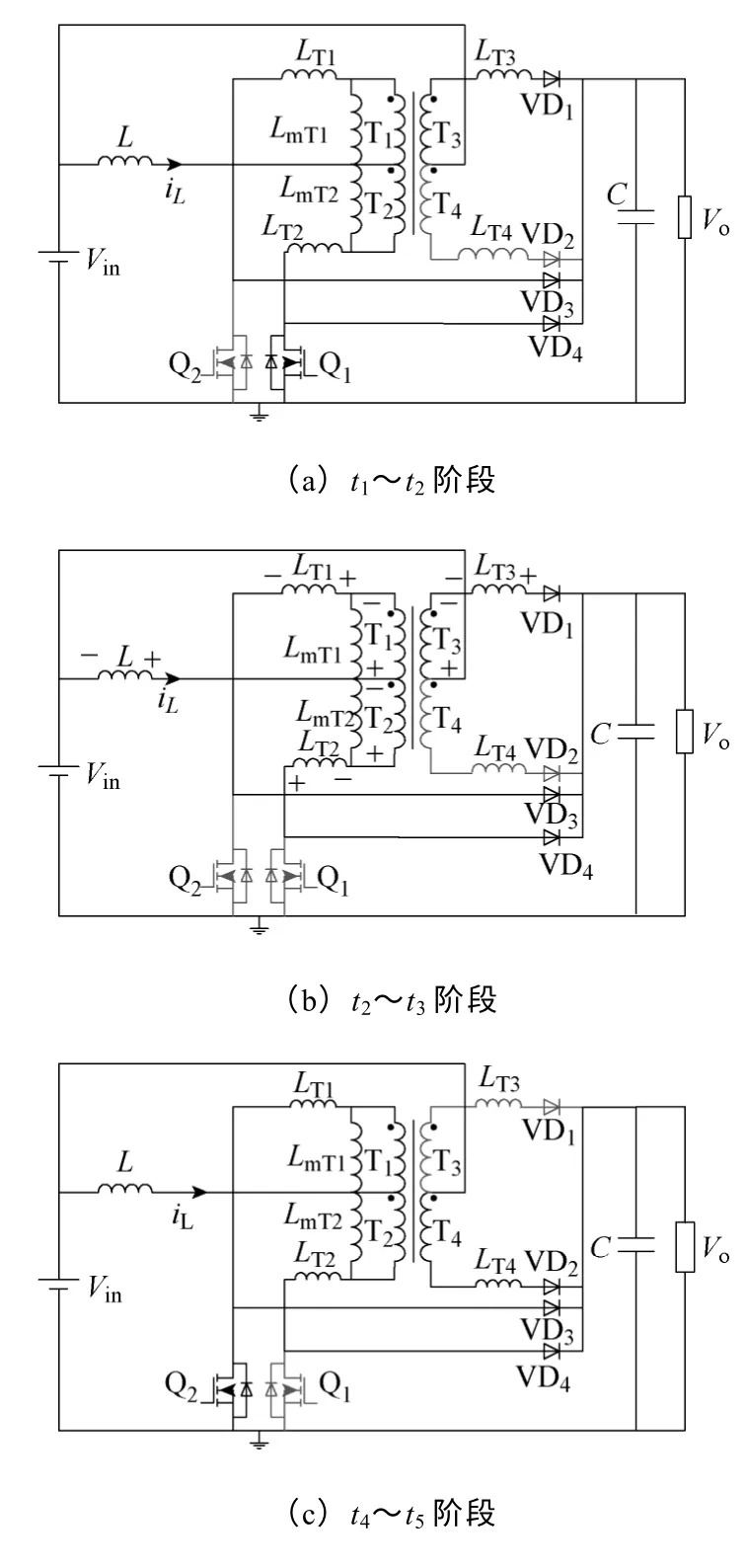
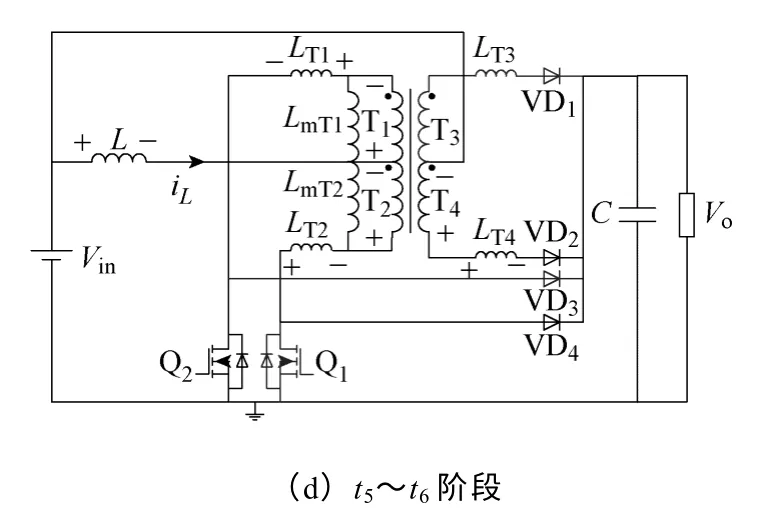
圖11 拓撲Ⅰs3的等效電路Fig.11 Equivalent circuit of topologyⅠs3
采用同樣方法可得正向尖峰電流的持續時間

輸出電流在t2時刻達到最大,此時電流正向尖峰可以表示為

式中,t2-t1等MOS 管的瞬態關斷時間ton-off。
產生負向電流尖峰的瞬態也可以分為兩個階段,t4~t5階段MOS 管由關斷至完全導通,t5~t6階段二極管VD2由關斷至完全導通。
t4~t5階段VD2開始導通,VD3、VD4開始關斷,L 開始充電,在t5時刻輸出電流達到最小,等效電路如圖11c 所示。在t4時刻Q2開始導通,電感電流平均地流過VD3和VD4。隨著Q2逐漸導通,流過T1的電流從0.5iL開始上升直至iL,流過T2的電流從0.5iL開始下降直至零,iT1與iT2變化斜率的絕對值相同。在t4時刻,Q2電流開始上升,而iQ2+iVD3=iT1,此時流過VD3的電流為iT1-iQ2,且iQ2的上升斜率遠大于iT1的上升斜率,而iVD4的斜率等于iT2的斜率,因此iVD3比iVD4下降得快,在t5時刻iVD3降為零。
t5~t6階段Q2、VD2、VD4均導通,其中iVD2逐漸上升,iVD4逐漸下降,直至t6時刻到達穩態,此時VD4完全關斷,VD1的電流等于io。等效電路如圖11d 所示。
在t4~t6時刻iVD4的變化量為-0.5io,可得負向尖峰電流的持續時間

輸出電流在t5時刻達到最小,此時電流負向尖峰值可以表示為

式中,t5-t4等于MOS 管的瞬態導通時間toff-on。
4 影響電流尖峰的因素
假設電感電流紋波可以忽略,三種拓撲的尖峰幅值與持續時間見下表。其中拓撲Ⅱs1的輸出電流僅含負向尖峰,拓撲Ⅱcb2的輸出電流僅含正向尖峰,拓撲Ⅰs3的輸出電流既包含正向尖峰又包含負向尖峰,這三種拓撲的尖峰電流幅值及其持續時間均與io、vin、vout以及LT(LLK)有關。由于io、vin和vout均由工況決定,因此只能通過減小變壓器漏感LT(拓撲Ⅱcb2中還包括耦合電感的漏感LLK)以減小電流尖峰的幅值和持續時間。
5 避免尖峰影響的電流采樣方法及其產生的問題
系統控制和參數遙測均需要對輸出電流進行采樣,然而這三種拓撲的輸出電流雖為低紋波電流,但均包含電流尖峰,不利于電流采樣和控制[10]。因此可以采用等效電流采樣的方法排除電流尖峰的影響。
拓撲Ⅱs1和拓撲Ⅰs3的電感電流相當于不包含電流尖峰的輸出電流,因此可以將電感電流等效為輸出電流進行采樣。拓撲Ⅱcb2中輸入電流與耦合電感二次電流之和,相當于不包含電流尖峰的輸出電流的2 倍,因此可將其等效為輸出電流進行采樣。三種拓撲的等效電流采樣點在圖3、圖6 和圖9 中均已標出。各拓撲的等效采樣電流與輸出電流如圖12 所示。
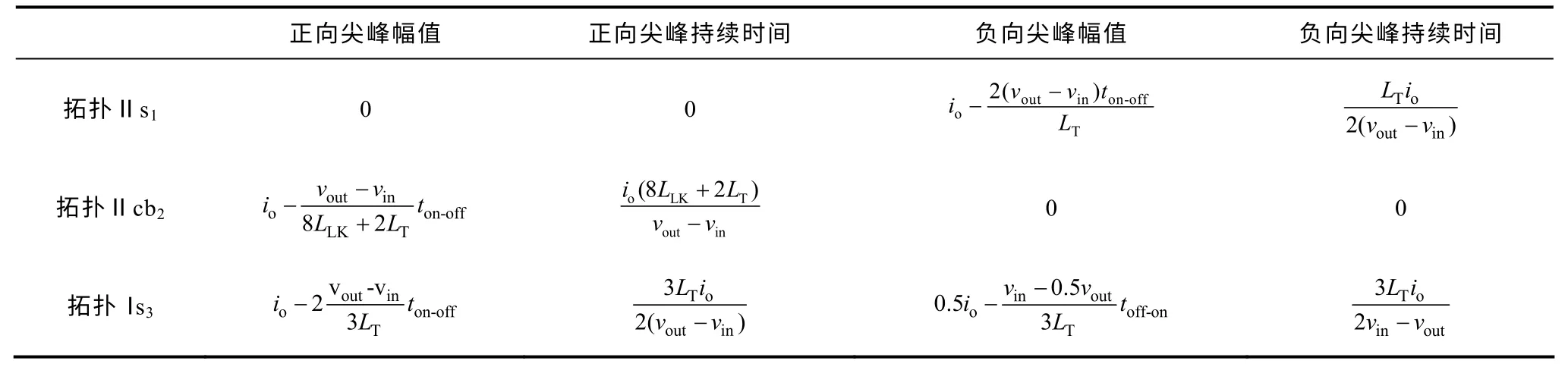
表 三種拓撲的尖峰幅值與持續時間比較Tab.Magnitude and duration of three topologies
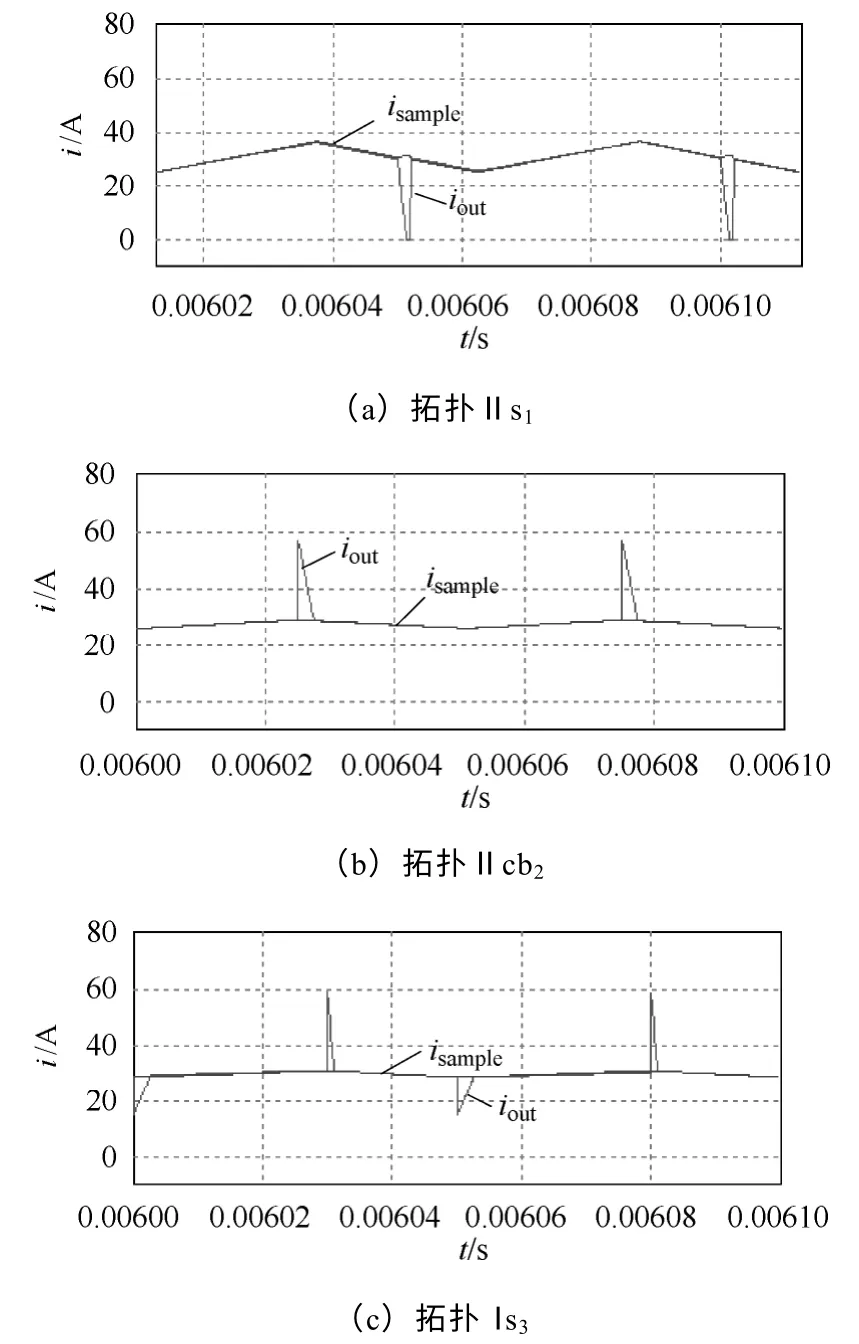
圖12 等效采樣電流與輸出電流波形Fig.12 Current sampled by normal method and equivalent method
由于等效電流采樣僅采輸出電流的三角波,去除尖峰,因此通過等效電流采樣采得的電流值并不等于實際輸出電流值。這會直接影響輸出電流的控制和遙測的精確度。下面以42V 母線PCU 系統中的BDR 模塊為背景,搭建實驗平臺,通過理論分析和實驗結果比較三種拓撲的電流尖峰對于遙測精確度的影響。
42V 母線PCU 系統中BDR 模塊的輸入電壓為26~38V,負載電流為 2~14A。MOS 管型號為IRF3710,其中ton-off=47ns,toff-on=58ns,等效開關頻率約為22.4kHz。令輸出電流為iout,等效電流采樣值為isample,那么電流采樣誤差率可以表示為

根據表可計算得到|iout-isample|,結合式(19)可得三種拓撲的電流采樣誤差率。圖13 是變壓器漏感約為2μH、負載電流為7A 時通過理論分析和實驗得到的電流采樣誤差率對于輸入電壓的曲線。由圖可知拓撲Ⅱcb2的電流采樣誤差率最大,拓撲Ⅰs3次之,拓撲Ⅱs1最小。總體來看,實驗結果與理論分析結果較為一致,因此可根據本文的分析結果補償遙測值,提高遙測精度。實驗結果與理論分析結果相比略有誤差,這是由于理論分析時忽略的輸出電流的紋波以及變壓器勵磁電流對電流采樣的影響。
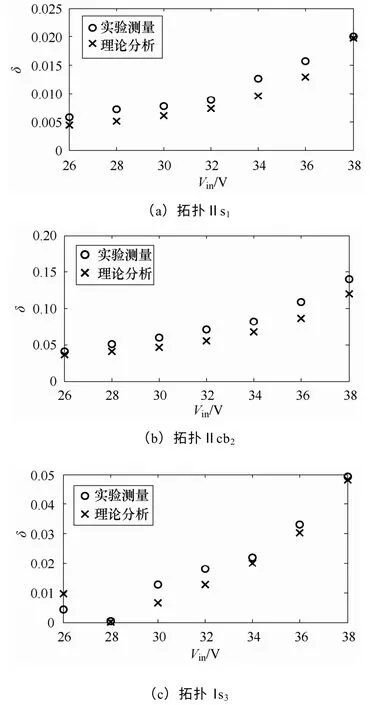
圖13 漏感約為2μH、負載電流為7A 時三種拓撲的電流采樣誤差率曲線Fig.13 Curve of current sampling error rate for three topologies when LT≈2μH,iout=7A
6 結論
針對非隔離高效推挽類拓撲輸出電流存在尖峰的問題,本文根據不同的尖峰特性將其分為三類,并選擇Ⅱs1、Ⅱcb2和Ⅰs3三種具有代表性的拓撲進行定量分析,得到以下結論:
(1)拓撲Ⅱs1的輸出電流僅含負向尖峰,拓撲Ⅱcb2的輸出電流僅含正向尖峰,拓撲Ⅰs3的輸出電流既包含正向尖峰又包含負向尖峰。
(2)隨著io以及LT的增大,拓撲Ⅱs1、Ⅱcb2和Ⅰs3的電流尖峰幅值以及持續時間增大。隨著輸入電壓的增大,拓撲Ⅱs1的負向電流尖峰幅值以及持續時間增大,拓撲Ⅱcb2和Ⅰs3的正向電流尖峰幅值以及持續時間增大,拓撲Ⅰs3的負向電流尖峰幅值以及持續時間減小。
(3)為避免電流尖峰的影響,需采用等效電流采樣法,因此會引起較大的電流采樣誤差。隨著負載電流以及漏感的增大,三種拓撲的電流采樣誤差率增大。隨著輸入電壓的增大,拓撲Ⅱs1和Ⅱcb2的電流采樣誤差率增大,拓撲Ⅰs3的電流采樣誤差率先減小后增大,在輸入電壓為28V 附近其電流采樣誤差率幾乎為零。
(4)理論分析結果與實驗結果之間基本一致,但略有誤差,這是由于理論分析時忽略的輸出電流的紋波,且變壓器勵磁電流對于電流采樣有影響。
[1]Nicolas N,Didier L,Peter A,et al.A new modular and flexible power system for LEO missions[C].Proceedings of 9th European Space Power Conference,2011:SP-690.
[2]Morsaniga P,Gervasio G,Cuzzocrea G.Bepicolombo electrical power system[C].Proceedings of 9th European Space Power Conference,2011:SP-690.
[3]Dan O.Lessons learnt in-flight-the STRV microsatellite power system[C].Proceedings of 4th European Space Power Conference,1995:257-261.
[4]Sullivan D O.Space power electronics-design drivers[J].Ecological Society of America,1994,1:18.
[5]Wolfgang D,Willi D.Generic 100V/high power bus conditioning[C].Proceedings of 7th European Space Power Conference,2005:SP-589.
[6]Soubrier L,Trehet E.High power PCU for alphabus:PSR100V[C].Proceedings of 9th European Space Power Conference,2011:SP-690.
[7]Soubrier L,B Patrick.High performance BDR for the PCU of alphabus[C].Proceedings of 8th European Space Power Conference,2008:SP-661.
[8]Maset E,Sanchis Kilders E,Weinberg A H,et al.Ion drive propulsion MPP power conditioning system without battery[C].Proceedings of 8th European Space Power Conference,2008:SP-661.
[9]Maset E,Ferrers A.5kW Weinberg converter for battery discharging in high-power communications satellites[C].Proceedings of IEEE Power Electronics Specialist Conference,2005:69-75.
[10]Weinberg A H,P Rueda Boldo.A high power,high frequency,DC to DC converter for space applications[C].Proceedings of IEEE Power Electronics Specialist Conference,1992:1140-1147.
