粒子群混合算法在變導向器面積計算中的應用
2014-11-19 08:42:24王軍,趙肅
航空發(fā)動機 2014年6期
關鍵詞:發(fā)動機
王 軍,趙 肅
(中航工業(yè)沈陽發(fā)動機設計研究所,沈陽110015)
0 引言
目前,航空發(fā)動機高精度穩(wěn)態(tài)數(shù)學模型均按變比熱計算方法[1]建立,具有高度非線性、基于部件特性的特點。模型一般采用迭代方法求解發(fā)動機共同工作方程,常用的迭代方法有Newton-Raphson(N-R)法、Broyden秩1法[2]、N+1點殘量法[3]和最速下降法,上述方法具有嚴格的數(shù)理局部收斂性,且收斂性依賴初值的選取,雖通過采用阻尼因子、松弛因子、初值的有限域優(yōu)化探索和迭代步長的線性探索與回溯[4]等改進方法可擴大其收斂范圍,但一般改善程度都較小;鑒于發(fā)動機工作包線寬廣及在特殊工作條件(如幾何面積突變等)下,發(fā)動機各部件共同工作時,因初值偏離最優(yōu)解較大導致模型出現(xiàn)不收斂的情況。
為了克服上述算法在收斂性方面的不足,粒子群算法(ParticleSwarmOptimization,PSO)等進化算法被引入發(fā)動機部件模型等非線性方程的求解[5-6]中,取得了較好效果。PSO具有全局收斂的能力,在進化初期收斂速度快,運算簡單,易于實現(xiàn),但其計算效率和收斂精度偏低,同時存在最優(yōu)解不穩(wěn)定的問題。結(jié)合常規(guī)迭代算法計算效率高和PSO全局收斂的優(yōu)點的混合算法改善了發(fā)動機部件模型求解過程中的收斂性。
本文采用混合粒子群算法解決在改變發(fā)動機渦輪導向器面積對性能影響計算中迭代不收斂的問題,以滿足穩(wěn)態(tài)性能仿真的需要。
1 粒子群算法及其改進
1.1 基本的粒子群算法
基本的粒子群算法[7]以模擬鳥的群體智能為特征,以求解優(yōu)化問題為背景。每只鳥被稱為1個粒子,每個粒子用其幾何位置和速度向量表示,參考各自的既定方向、個體所經(jīng)歷的最優(yōu)方向和整個鳥群所經(jīng)歷的最優(yōu)方向來確定飛行。假設在1個D 維的目標探索空間中有n個粒子,其中第i個粒子表示為1個D 維的向量,xi=(xi1,xi2,…,xiD)(i=1,2,…,n),表示第i個粒子在此探索空間中的位置,vi=(vi1,vi2,…,viD),表示第i個粒子的速度。假設第i個粒子迄今為止探索到的最優(yōu)位置為pi=(pi1,pi2,…,piD),整個粒子群迄今為止探索到的最優(yōu)位置為pg=(pg1,pg2,…,pgD),采用下列公式對粒子群進行速度和位置更新

式中:i=1,2,…,n,d=1,2,…,D;c1,c2為非負常數(shù)的學習因子;r1,r2為 [0,1]間的隨機數(shù);vid=[vmin,vmax],vmin/vmax為更新速度的最大/最小邊界;ω 為慣性權重。
1.2 改進的粒子群算法
在基本粒子群算法的基礎上,為提高粒子全局探索能力,發(fā)展了帶“被動聚集壓力”因子的PSO、自適應慣性權重的PSO[8]、混合探索粒子群算法(MSPSO)[9]及加速收斂的PSO(ACPSO)[10]等。
帶“被動聚集壓力”因子的PSO

式中:c3為被動聚集壓力因子;Prd為粒子群中隨機選擇的1個粒子;r3為[0,1]間的隨機數(shù)。
自適應慣性權重的PSO

式中:ωi為慣性權重,根據(jù)適應度函數(shù)值或者迭代次數(shù)自動調(diào)整。
混合探索粒子群算法(MSPSO)

式中:α 為[0,1]之間的1個常數(shù);k 為迭代次數(shù);Pld是第k 代種群中粒子最好位置。
加速收斂的PSO算法(ACPSO)

式中:Θ 為三角函數(shù)算子,一般取Θ=sin;α 為角度值,一般取α∈[0,π/8];β 為大于零的常數(shù),一般取β=3。
目前對PSO的改進主要集中在算法參數(shù)和粒子更新結(jié)構(gòu)的調(diào)整上,目的是使粒子跳出局部最優(yōu),使其全局和局部探索能力達到最佳平衡,提高算法的性能。但從航空發(fā)動機部件模型求解實例來看,因部件模型高度非線性化,導致模型的收斂速度和精度均低于傳統(tǒng)N-R等算法的收斂速度和精度,為進一步提高模型的收斂效率,在上述研究基礎上發(fā)展了粒子群混合算法。
1.3 粒子群混合算法
為綜合傳統(tǒng)算法和粒子群算法的優(yōu)點,提出了PSO-NR(粒子群-牛頓拉夫遜)和PSO-N+1(粒子群-N+1點殘量法)[11]等混合算法。
以PSO-NR混合算法為例說明混合算法的工作原理:在該算法中,N-R法仍為求解發(fā)動機部件非線性模型的主體算法,在性能計算時對在設定循環(huán)迭代次數(shù)內(nèi)不收斂的工作點采用PSO算法,變量初值采用N-R法最后1次循環(huán)獲得的數(shù)值。當循環(huán)迭代次數(shù)達到設定值后(根據(jù)計算精度設置合適的迭代次數(shù)),再次采用N-R法進行迭代計算,達到后期快速收斂的目的。如果計算仍不收斂,考慮到PSO獲得的最優(yōu)解不穩(wěn)定,再次采用混合算法,使用次數(shù)一般不大于10次,以免陷入死循環(huán)。
2 應用粒子群混合算法求解發(fā)動機部件模型
2.1 發(fā)動機部件模型的建立
以某型軍用混合排氣渦扇發(fā)動機為研究對象,按照輸入的控制規(guī)律和變量初值及部件間遵循的流量、壓力和功率平衡原則建立發(fā)動機共同工作方程[12],并將其轉(zhuǎn)換為誤差方程(殘差方程)
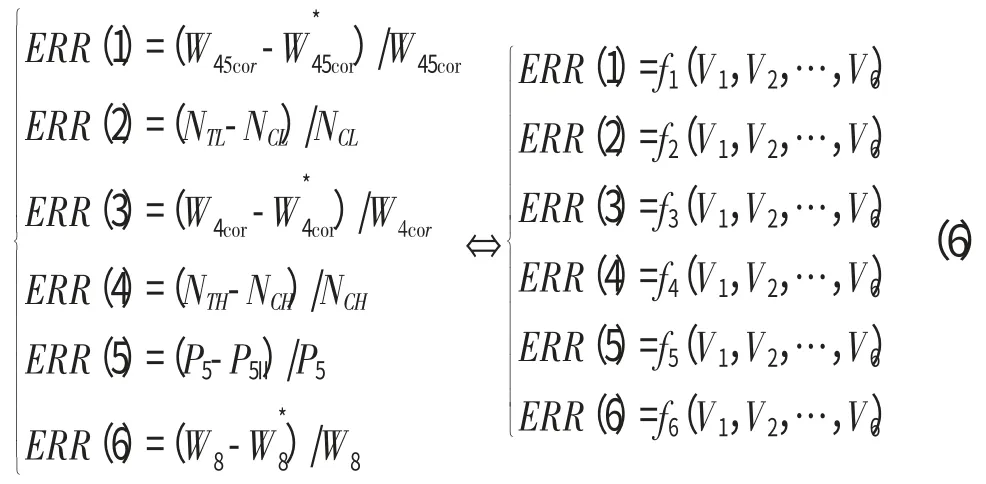
PSO是1種優(yōu)化算法,采用PSO求解非線性方程組,需要將方程組的求解問題轉(zhuǎn)化為函數(shù)的優(yōu)化問題。應用無約束優(yōu)化方法求解非線性方程組(式(6))時,通常將其轉(zhuǎn)化為非線性最小二乘問題:
2.2 粒子群混合算法參數(shù)的設置
2.2.1 學習因子
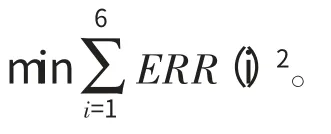
對于學習因子c1和c2,關系到個體最優(yōu)與全局最優(yōu)對粒子的影響程度。數(shù)學研究顯示,c1+c2>4且c1>c2時收斂性較好。學習因子對收斂性影響對比如圖1所示,采用文獻[10]中3組取值求解部件模型的收斂情況。
圖1 學習因子對收斂性影響對比
2.2.2 慣性權重
隨著迭代次數(shù)的增加,最優(yōu)解的探索范圍將逐漸縮小,對于慣性權重,變慣性權重的收斂效果要比定慣性權重的好。1種方法采用遞減函數(shù)[10]來保證算法不會因粒子運動慣性過大而造成收斂緩慢,另1種方法是慣性權重隨著粒子適應度的變化而變化,適應度值增大慣性權重也增大,反之隨其減小而減小。
前者ω 函數(shù)定義為

式中:ωmax、ωmin分別為慣性權重的上、下限;T 為迭代總次數(shù);n 為當前迭代次數(shù);x 為函數(shù)的凸凹形態(tài)。
后者ω 函數(shù)定義為

式中:Fitk為某個粒子第k 次迭代時的適應度值。
對于所研究的部件模型,2種變慣性權重方法的收斂性對比如圖2所示。從圖中可見,以適應度值為自變量的慣性權重的收斂速度更快、收斂精度更高。
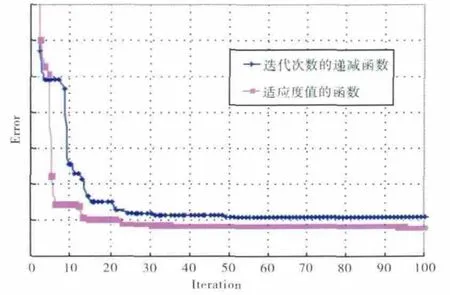
圖2 慣性權重對收斂性影響對比
2.2.3 局部改進的PSO
利用第2.1節(jié)建立的發(fā)動機部件模型,測試基本PSO、帶“被動聚集壓力”因子的PSO、MSPSO和ACPSO等粒子群算法的收斂性,結(jié)果如圖3所示。從圖中可見,3 種改進的PSO收斂速度較基本PSO的快,收斂精度差別不大,本文采用混合探索粒子群算法(MSPSO)。
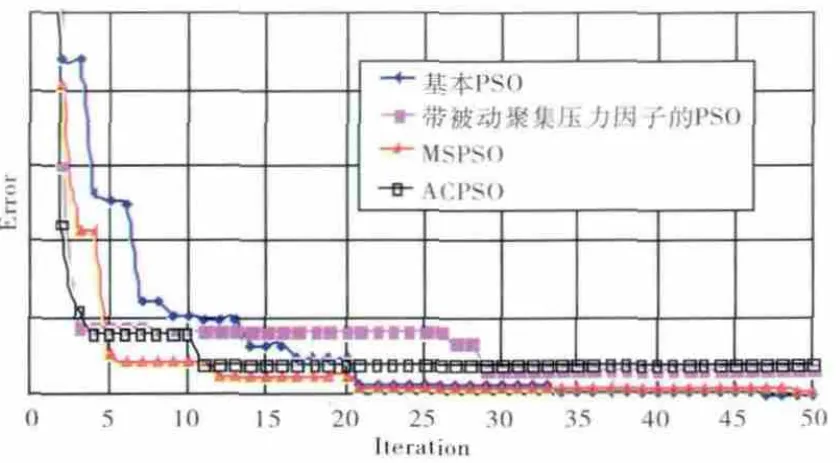
圖3 局部改進方法對收斂性影響對比
2.2.4 迭代誤差限
對于粒子群混合算法,需設置2個迭代誤差限,即PSO和N-R 算法的迭代誤差限。在一般情況下,PSO的誤差限要大于N-R 算法的,主要因為PSO后段收斂緩慢,較小的誤差限會導致迭代次數(shù)增加,計算效率下降,PSO的誤差限可取收斂曲線的拐點。N-R 算法的計算精度較高,可以取目標誤差限作為其誤差限。本文PSO的誤差限取0.03,N-R 算法的誤差限取0.003。
3 變導向器面積計算實例與試驗驗證
一般來說,實際發(fā)動機很難完全滿足設計要求,這就需要發(fā)動機在調(diào)試階段為滿足性能匹配和優(yōu)化的要求,具備一定的調(diào)整能力。主要體現(xiàn)在風扇、壓氣機可調(diào)角度的優(yōu)化,以及渦輪導向器排氣面積、噴管喉道面積的微調(diào)上。壓氣機可調(diào)葉片角度及噴管喉道面積一般為發(fā)動機控制參數(shù),其調(diào)節(jié)規(guī)律易于實現(xiàn)。渦輪導向器在固定涵道比的發(fā)動機上是不可調(diào)的,為了滿足性能優(yōu)化需求,需要生產(chǎn)不同組別的渦輪導向器供試驗用,費用高、周期長。利用數(shù)值仿真可在發(fā)動機生產(chǎn)之前確定生產(chǎn)組別的數(shù)量和大小,指導調(diào)試方向,減少試制和試驗費用。
現(xiàn)有的發(fā)動機穩(wěn)態(tài)數(shù)學模型大多采用經(jīng)典的N-R 算法,在進行渦輪導向器面積變化對發(fā)動機性能影響計算時,因特性圖或折合流量差別較大,導致誤差突變,出現(xiàn)迭代不收斂的現(xiàn)象,采用PSO-NR 算法能夠很好地解決。
3.1 高壓渦輪導向器面積變化
在調(diào)整某型發(fā)動機高壓渦輪導向器面積的計算時,可采用小偏差流量不變或更換部件特性的方法。前者主要考慮在慢車轉(zhuǎn)速以上,高壓渦輪導向器處于臨界狀態(tài),導向器面積的變化可以認為只是流過渦輪的折合流量的變化,且忽略渦輪效率變化的影響,在一定條件下能夠滿足精度需要;后者的計算精度較高,但需要部件提供精確的計算或試驗修正特性。
在上述計算條件下,采用PSO-NR 算法計算高壓渦輪導向器相對于基準值偏小3.5%對轉(zhuǎn)差、低壓渦輪出口排氣溫度T6和推力F 的影響,其計算和試驗結(jié)果的對比如圖4~6所示。
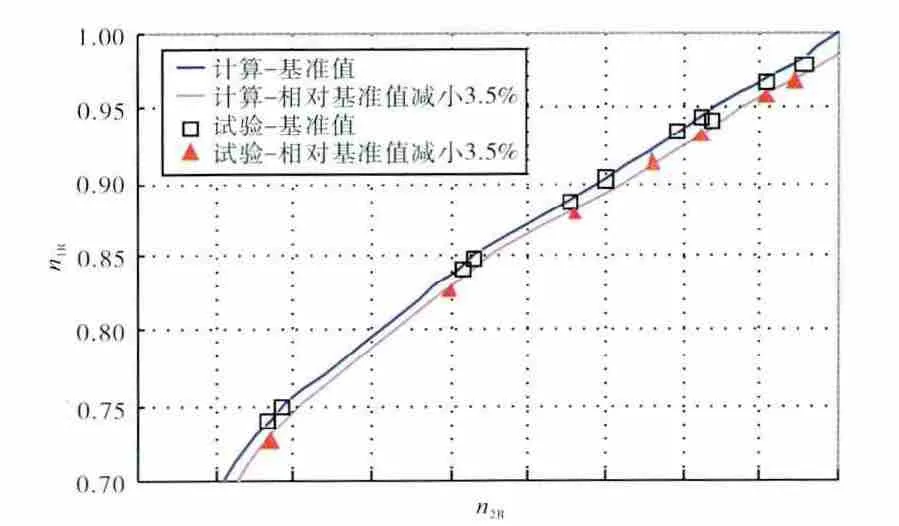
圖4 高壓渦輪導向器面積變化對轉(zhuǎn)差的影響
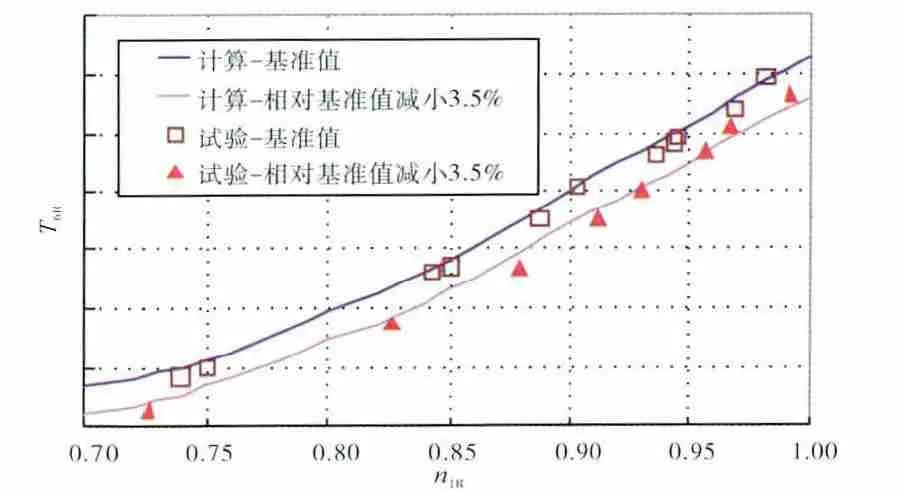
圖5 高壓渦輪導向器面積變化對排氣溫度的影響
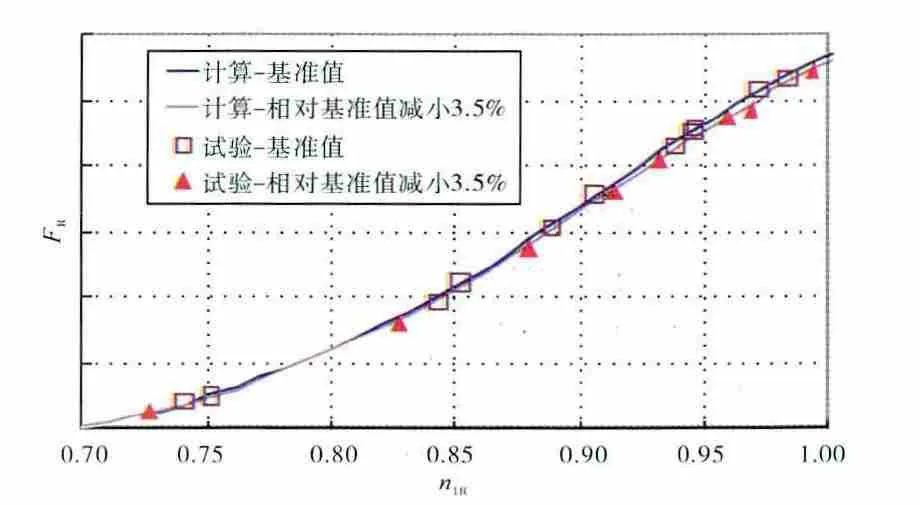
圖6 高壓渦輪導向器面積變化對推力的影響
從圖中可見,當高壓渦輪導向器面積減小3.5%時,發(fā)動機轉(zhuǎn)差增大0.6%~1.0%,排氣溫度降低10~15K,推力減小1.2%~1.9%。
3.2 低壓渦輪導向器面積變化
在進行調(diào)整某型發(fā)動機低壓渦輪導向器面積的計算時,考慮到低壓渦輪導向器僅在高轉(zhuǎn)速范圍內(nèi)才能處于臨界狀態(tài),采用更換部件特性的方法計算全轉(zhuǎn)速特性。計算低壓渦輪導向器相對基準值增大4%對轉(zhuǎn)差、低壓渦輪出口排氣溫度T6和推力F 的影響,其計算和試驗結(jié)果的對比如圖7~9所示。
從圖中可見,當?shù)蛪簻u輪導向器面積增加4%時,發(fā)動機轉(zhuǎn)差增大0.5%~0.7%,排氣溫度在低轉(zhuǎn)速下略有降低,在高轉(zhuǎn)速下基本一致,推力在全轉(zhuǎn)速范圍內(nèi)一致。
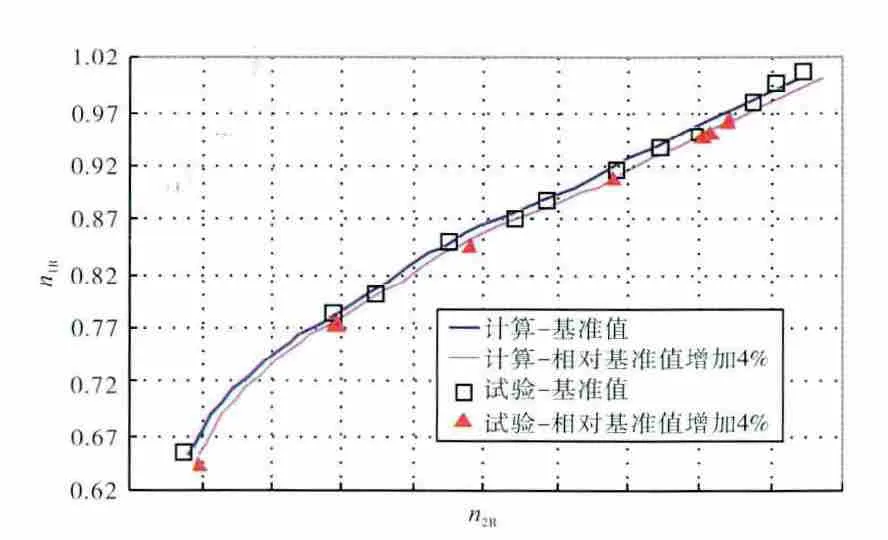
圖7 低壓渦輪導向器面積變化對轉(zhuǎn)差的影響
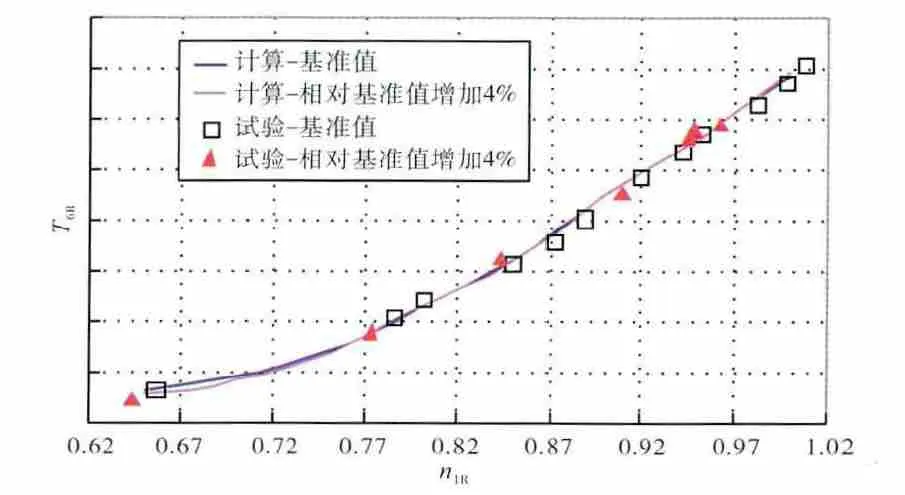
圖8 低壓渦輪導向器面積變化對排氣溫度的影響
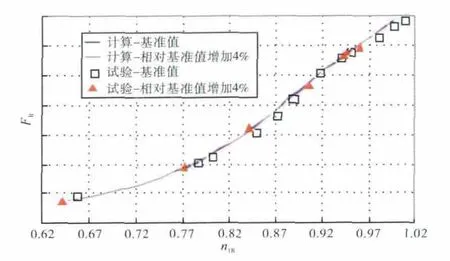
圖9 低壓渦輪導向器面積變化對推力的影響
4 總結(jié)
為滿足快速收斂,提高收斂性和收斂效率的要求,設置適合的學習因子、慣性權重、迭代誤差限及選擇合適的粒子群改進算法,可改善粒子群算法的前段收斂速度和后段的收斂精度。
采用PSO-NR求解本文建立的發(fā)動機共同工作方程組,可有效解決高、低壓渦輪導向器面積改變對性能影響計算不收斂的問題;采用換特性計算方法的計算結(jié)果與試驗結(jié)果基本一致。改變渦輪導向器面積對發(fā)動機性能影響的仿真計算可為發(fā)動機調(diào)試提供技術支持。
[1]童凱生.航空渦輪發(fā)動機性能變比熱計算方法[M].北京:航空工業(yè)出版社,1991:9-18.TONG Kaisheng.Calculation method of performance with variable specific heat for aviation turbine engine[M].Beijing:Aviation Industry Press,1991:9-18.(in Chinese)
[2]熊純.航空發(fā)動機動態(tài)數(shù)學模型非線性方程組解法研究[J].長沙航空職業(yè)技術學院學報,2002,2(3):39-42.XIONG Chun.Study on the solution of nonlinear equation group of dynamic mathematical model of aeroengine[J].Changsha Aeronautical Vocational and Technical Collegle Journal,2002,2(3):39-42.(in Chinese)
[3]李家瑞,孫健國,張紹基.航空發(fā)動機總體性能數(shù)學模型的1種收斂算法[J].航空發(fā)動機,2005,31(4):48-50.LI Jiarui,SUN Jianguo,ZHANG Shaoji.A convergence algorithm of aeroengine performance mathematical model[J].Aeroengine,2005,31(4):48-50.(in Chinese)
[4]駱廣琦,桑增產(chǎn),王如根 等.航空燃氣渦輪發(fā)動機數(shù)值仿真[M].北京:國防工業(yè)出版社,2007:6-8.LUO Guangqi,SANG Zengchan,WANG Rugen,et al.Numerical methods for aviation gas turbine engine simulation[M].Beijing:National Defense Industry Press,2007:6-8.(in Chinese)
[5]陳長憶,葉永春.基于粒子群算法的非線性方程組求解[J].計算機應用與軟件,2006,23(5):137-139.CHEN Changyi,YE Yongchun.Solving nonlinear systems of equations based on particle swarm optimization[J].Computer Application and Software,2006,23(5):137-139.(in Chinese)
[6]蘇三買,陳永琴.基于混合遺傳算法的航空發(fā)動機數(shù)學模型解法[J].推進技術,2007,28(6):661-664.SU Sanmai,CHEN Yongqin.Hybrid genetic algoritham in solving aeroengine nonlinear mathematical model[J].Journal of Propulsion Technology,2007,28(6):661-664.(in Chinese)
[7]劉志雄,梁華.粒子群算法中隨機數(shù)參數(shù)的設置與試驗分析[J].控制理論與應用,2010,27(11):1489-1496.LIU Zhixiong,LIANG Hua.Parameter setting and experimental analysis of the random number in particle swarm optimization algorithm [J].Control Theory&Applications,2010,27(11):1489-1496.(in Chinese)
[8]張強,李本威,馬力.粒子群算法在航空發(fā)動機部件模型求解中的應用[J].系統(tǒng)仿真學報,2009,21(12):3584-3587.ZHANG Qiang,LI Benwei,MA Li.Application of particle swarm optimization in solution to aeroengine component-level model[J].Journal of System Simulation (S1004-731X),2009,21(12):3584-3587.(in Chinese)
[9]連志剛,焦斌.一種混合探索的粒子群算法[J].控制理論與應用,2010,27(10):1404-1410.LIAN Zhigang,JIAO Bin.A particle swarm algorithm based on hybrid exploration[J].Control Theory and Application,2010,27(10):1404-1410.(in Chinese)
[10]任子暉,王堅.加速收斂的粒子群優(yōu)化算法[J].控制與決策,2011,26(2):201-206.REN Zihui,WANG Jian.Accelerate convergence particle swarm optimization[J].Control and Decision Making,2011,26(2):201-206.(in Chinese)
[11]駱廣琦,劉波,宋頔源.基于混合粒子算法的航空發(fā)動機數(shù)學模型解法[J].燃氣渦輪試驗與研究,2011,24(2):5-8.LUO Guangqi,LIU Bo,SONG Diyuan.Hybrid particle swarm optimization in solving aeroengine nonlinear mathematical model[J].Gas Turbine Experiment and Research,2011,24(2):5-8.(in Chinese)
[12]廉筱純,吳虎.航空發(fā)動機原理[M].西安:西北工業(yè)大學出版社,2005:252-255.LIAN Xiaochun,WU Hu.Theory of aeroengine[M].Xi’an:Northwest Polytechnical University Press,2005:252-255.(in Chinese)
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15