一種改進(jìn)的LK光流算法應(yīng)用研究
2014-10-17 06:09:22房正華楊新艷
網(wǎng)絡(luò)安全技術(shù)與應(yīng)用 2014年9期
房正華 楊新艷 李 蒙
(青島工學(xué)院信息工程學(xué)院 山東 266300)
0 引言
運動物體實時識別跟蹤技術(shù)的研究一直是電子信息領(lǐng)域的一大熱點,并在各種工程應(yīng)用領(lǐng)域發(fā)揮了及其重要的作用,涉及圖像識別、模式匹配、實時跟蹤算法等多種技術(shù)領(lǐng)域。目前,該技術(shù)在識別精度、跟蹤效率、復(fù)雜環(huán)境適應(yīng)性等多方面都有了長足的進(jìn)步,這也為其在各個領(lǐng)域的行業(yè)應(yīng)用打下了良好的基礎(chǔ),包括區(qū)域智能監(jiān)控,日常生活中基于身份識別的個性化服務(wù),視頻圖像處理中的視頻去模糊、視頻去抖等。
1 常見的運動物體識別跟蹤技術(shù)
當(dāng)前的運動物體識別跟蹤技術(shù)主要有以下幾種類型。
(1)基于對目標(biāo)物體特征識別,諸如人臉識別中人臉的對稱性,雙目的對稱性,外圍輪廓等都是人臉這個物體的特征,以這些特征作為在視頻、圖像中抓取人員圖像的基礎(chǔ)。人員監(jiān)控、基于視頻的公交車人數(shù)統(tǒng)計等應(yīng)用主要就是采用這種方式。其可以實現(xiàn)對一類物體(比如人員,車牌)的識別,而并不關(guān)注與其特定的身份。
(2)基于模型匹配,對于被識別或被監(jiān)控人員或物體,預(yù)先在系統(tǒng)之上生成對應(yīng)的模型,形成模型庫。在該人員(物體)進(jìn)入監(jiān)控區(qū)域后,系統(tǒng)通過將圖像實時與模型庫中的模型對照,從而實現(xiàn)對某一個人員準(zhǔn)確識別。
以上兩種傳統(tǒng)的物體識別算法,面對實際應(yīng)用中的復(fù)雜情景,會面臨諸多挑戰(zhàn)。
①目標(biāo)特性描述存在局限性,在物體特征復(fù)雜或處于復(fù)雜背景情況下,對其識別率造成影響。
②目標(biāo)特性靜態(tài)描述,無法對運動中或產(chǎn)生形變的物體持續(xù)跟蹤。當(dāng)同一物體展現(xiàn)不同的觀測角度或產(chǎn)生形變時,造成目標(biāo)特性描述無效。
③傳統(tǒng)模型通常采用“離線訓(xùn)練物體模型”,其被識別物體的最新特征不能自動反饋至模型,造成物體及人員的靜態(tài)模型應(yīng)對物體形變,角度變化時存在局限性。
2 傳統(tǒng)的運動物體跟蹤算法及本文提出的新算法
運動物體跟蹤算法主要有“減背景法”、“幀差法”、“光流法”等。其中LK光流算法為目前能較準(zhǔn)確地檢測運動目標(biāo)的算法。而在實際應(yīng)用中,該算法在視頻圖像不穩(wěn)定、模糊的情況下存在錯誤預(yù)測點群,造成跟蹤效果不穩(wěn)定。
運動物體識別跟蹤技術(shù)所存在的這些問題,使其在實際應(yīng)用中所面對適應(yīng)性不好、魯棒性差、環(huán)境要求苛刻等諸多問題,影響其產(chǎn)品轉(zhuǎn)化能力及行業(yè)應(yīng)用效果。該文針對目前運動物體識別跟蹤技術(shù)所存在的問題,提出了以具有實時在線更新特性的“物體多維度模型”為基礎(chǔ),以四相位交叉約束的“無監(jiān)督自學(xué)習(xí)分類器”作為物體模型自更新的驅(qū)動,并結(jié)合“基于位置正負(fù)置信區(qū)域約束的跟蹤定位算法”,最終實現(xiàn)一個新穎的多運動物體實時識別跟蹤技術(shù)體系。相對于傳統(tǒng)算法,該系統(tǒng)最大的優(yōu)勢是其可以精準(zhǔn)地實現(xiàn)對生活中普遍存在的可形變物體(如筆記本電腦的開合狀態(tài)、人臉的正側(cè)面等)的識別與跟蹤。在LK光流算法的基礎(chǔ)上創(chuàng)新性的添加了物體位置正負(fù)置信區(qū)(前景,背景)。
3 新算法的應(yīng)用
本文提出的是一種面向視頻中物體特征復(fù)雜、背景情況復(fù)雜、可形變物體的物體實時識別跟蹤技術(shù),并基于此算法在嵌入式平臺上實現(xiàn)身份識別與網(wǎng)絡(luò)電視重點個性化推薦系統(tǒng)。算法研究方面包括“無監(jiān)督自學(xué)習(xí)分類器”、“實時更新的物體多維模型”、“基于位置正負(fù)置信區(qū)域約束的跟蹤定位算法”構(gòu)成,圖1描述了整個系統(tǒng)組成。
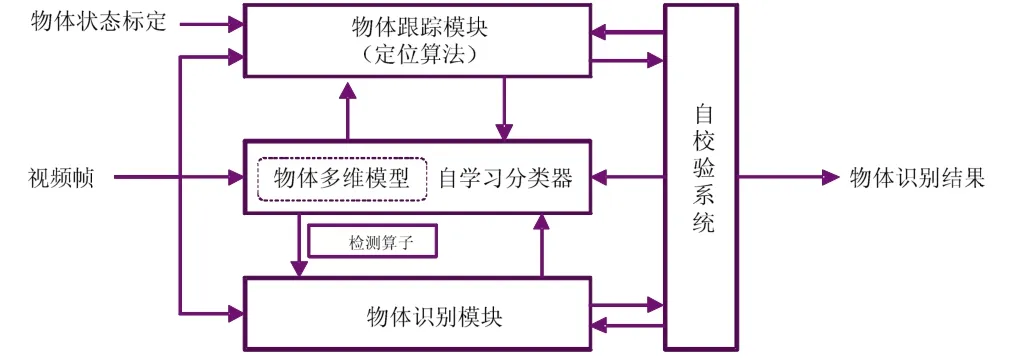
圖1 系統(tǒng)組成
其運作方式如下:
(1)通過給定被監(jiān)控物體的初始形態(tài),“跟蹤定位算法”對視頻中的物體識別跟蹤。
(2)同時“自學(xué)習(xí)分類器”對當(dāng)前最新的物體形態(tài)進(jìn)行分類學(xué)習(xí)。
(3)基于分類器最新的分類及識別結(jié)果更新物體多維模型,該多維模型包括時間軸、特征點群描述、出現(xiàn)位置、正置信區(qū)、運動描述等內(nèi)容。
(4)更新的物體多維模型用于進(jìn)一步的識別與跟蹤。
系統(tǒng)中的三個模塊互相作用與約束,構(gòu)成一個交互式自校驗更新子系統(tǒng),并對上述三個模塊之間進(jìn)行交互校驗,互為添加的迭代約束條件,進(jìn)而提高模型優(yōu)化水平與定位精度。
4 系統(tǒng)主要模塊構(gòu)成
基于該算法,實現(xiàn)實時身份驗證,并構(gòu)建網(wǎng)絡(luò)電視終端的個性化智能推薦系統(tǒng)。該基于身份認(rèn)證的智能推薦系統(tǒng)是上述算法的驗證與實現(xiàn),系統(tǒng)主要模塊如下:
(1)視頻采集:通過微型攝像頭捕捉用戶的影像,傳輸給跟蹤識別子系統(tǒng)。
(2)人臉跟蹤:實現(xiàn)“基于位置正負(fù)置信區(qū)域約束的光流特征點群跟蹤算法”。
(3)物體模型:用于存儲和描述物體多維模型,并作為物體識別的依據(jù)。
(4)無監(jiān)督機器學(xué)習(xí):實現(xiàn)“四相位交叉約束自學(xué)習(xí)訓(xùn)練算法”,并實時更新物體模型。
(5)物體識別:基于實時更新的物體多維模型,完成對視頻中物體的識別。
(6)信息推送:根據(jù)識別的結(jié)果,推送合適的節(jié)目及信息。
(7)通信:同網(wǎng)絡(luò)電視終端后臺通信,獲得針對不同人群的節(jié)目與消息信息。
5 結(jié)束語
本文提出的運動物體識別跟蹤算法是對LK光流算法的改進(jìn),首次將物體位置正負(fù)置信區(qū)域約束應(yīng)用到傳統(tǒng)的LK光流算法,大幅降低了原算法中錯誤預(yù)測點群前后幀匹配相似值,提高了算法在視頻模糊、前后幀匹配較差等問題上的適應(yīng)性與魯棒性。
[1]楊國亮.一種改進(jìn)的光流算法[J].計算機工程,2006,32(15):187-189.
[2]儲珺.基于光流的動態(tài)背景運動目標(biāo)檢測算法[J].南昌航空大學(xué)學(xué)報自然科學(xué)版.2011,25(3):1-6.
[3]施家.動態(tài)場景中運動目標(biāo)檢測與跟蹤[J].北京理工大學(xué)學(xué)報自然科學(xué)版,2009,29(10):858-860.
[4]張娟.運動目標(biāo)跟蹤算法研究綜述[J].計算機應(yīng)用研究,2009,26(12):4407-4410.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
 網(wǎng)絡(luò)安全技術(shù)與應(yīng)用2014年9期
網(wǎng)絡(luò)安全技術(shù)與應(yīng)用2014年9期
- 網(wǎng)絡(luò)安全技術(shù)與應(yīng)用的其它文章
- 基于物聯(lián)網(wǎng)和3G技術(shù)的智能水產(chǎn)養(yǎng)殖環(huán)境監(jiān)測系統(tǒng)的設(shè)計與應(yīng)用
- IT應(yīng)用運維自動化研究與應(yīng)用
- 基于AJAX與J2EE的新型Web應(yīng)用的設(shè)計與實現(xiàn)
- 談如何培養(yǎng)學(xué)生的網(wǎng)絡(luò)自主學(xué)習(xí)能力
- 基于翻轉(zhuǎn)課堂教學(xué)模式的網(wǎng)頁制作課程改革探討
- 淺析醫(yī)院網(wǎng)絡(luò)信息化的建設(shè)和管理