基于拉格朗日插值法的改進微網功率控制方法
2014-09-26 06:31:20,,,,
電氣開關 2014年6期
關鍵詞:系統
,,,,
(1.西南交通大學電氣工程學院,四川 成都 610031,2.重慶黔江電力公司,重慶 400000)
1 引言
隨著新型技術的應用,尤其是電力電子接口和現代控制理論的發展,微電網的概念出現了。微電網將額定功率為幾十千瓦的發電單元—微源(MS)、負荷、儲能裝置及控制裝置等結合,形成了一個單一的可控的單元,同時向用戶供給電能和熱能。基于微電網結構的電網調整能夠方便大規模的分布式能源(DER)互聯并接入中低壓配電系統,提供了一種充分利用DER發電單元的機制[1]。
與傳統的集中式能源系統相比,微電網接近負荷,不需要建設大電網進行遠距離高壓或超高壓輸電,可以減少線損,節省輸配電建設投資和運行費用;由于兼具發電、供熱、制冷等多種服務功能,分布式能源可以有效地實現能源的梯級利用,達到更高的能源綜合利用效率。微電網能以非集中程度更高的方式協調分布式能源,因而可以減輕電網控制的負擔并能夠完全發揮分布式電源的優勢。所以,與大電網單獨供電方式相比,微電網與大電網結合具有明顯優勢[2,3]。
2 微電網的結構及概念
微電網(Micro-grid)是指由分布式電源、負荷、儲能裝置、能量轉換設施、控制系統等組成的小型發電系統,可以看作是基于分布式發電裝置的、管理局部能量供求關系的小電網,它既可以與主系統并網運行,也可以與主系統分離后孤立運行,其結構如圖1所示[4]。圖1中的微電網由兩個并聯的分布式發電裝置DG1和DG2、電網、開關K以及負載組成。在運行于并網模式時,微電網通過開關K與電網相連,連接點為公共藕合點,DG1和DG2只向重要負載提供部分能量(電網也提供一部分能量)。這種運行模式減輕了電網的負擔,并且提高了重要負載的抗干擾性。但是在電網故障或檢修的情況下,開關K將跳開,電網被切離,系統中的DG1和DG2將負責調節負載電壓,并按預先設定的功率分配的原則向微電網中所有重要負載供電,此時微電網工作于獨立運行模式即孤島運行模式。在電網故障清除后,微電網要在開關K閉合之前重新取得與電網的同步,以便平穩恢復到并網運行模式[5]。

圖1 微網的基本結構圖
微電網一般采用混合發電方式,如風力發電以及滿足局部供電需求的以化石能源為燃料的發電裝置等。其優勢是:將小規模的發電裝置與負載組成一個整體,更靈活的滿足局部負載的需求;還可以通過控制負載來實現微網內短期的能量平衡。
3 微電網的控制方法
微電網系統有與外部電網并網運行和孤島運行兩種運行模式[6]。并網模式是指在正常情況下,微電網與常規電網并網運行時向電網提供多余的電能或由電網補充自身發電量的不足。孤網運行方式是指當檢測到電網故障或電能質量不滿足要求時,微電網可以與主網斷開形成孤島模式,由DG向微電網內的負荷供電。
根據微電網運行的實際情況,不同類型的DG采用不同的控制方法,才能在保證系統穩定運行的基礎上實現能源的最大利用率。對逆變電源的控制方法通常有:恒功率(PQ)控制、恒壓恒頻(V/f)控制,下垂(Droop)控制。
(1)恒功率控制
一個分布式電源接口逆變器采用PQ控制,表示其控制目的是使分布式電源輸出的有功功率和無功功率等于其參考功率。通常PQ控制方式用于微電網并網運行時的逆變電源控制[7]。在該狀態下,微電網內負荷波動、頻率和電壓擾動由大電網承擔,各DG不考慮頻率調節和電壓調節,直接依照電網頻率和電壓作為調節基礎,控制逆變器按照給定的參考值進行有功功率和無功功率的輸出[8]。這樣DG僅發出或吸收功率,可以有效避免因DG直接參與電網饋線的電壓調節,而造成對電力系統的負面影響[9]。
(2)恒壓恒頻(V/f)控制
該控制的基本思想是不管分布式電源輸出功率如何變化,其輸出電壓的幅值和頻率一直維持不變[10]。通常V/f控制方式用于微電網孤島運行時的逆變電路[11]。在該狀態下,微電網中必須至少有一個DG作為主控電源,為整個獨立的微電網提供電壓和頻率的參考值,來保證電壓和頻率始終運行在一定水平。V/f控制方式的實質是不論逆變電源的輸出功率如何變化,逆變器輸出的電壓幅值和頻率一直維持不[12]。
(3)下垂(Droop)控制
下垂控制主要用于微電網運行中多個并聯運行的逆變電源[13]。主要是指分布式電源控制方式與傳統同步電機相仿,微電源逆變器輸出的有功功率主要取決于電壓矢量間的功角差,無功功率主要取決于電壓矢量間的幅值差。該控制利用分布式電源輸出有功功率和頻率呈線性關系而無功功率和電壓幅值成線性關系的原理而進行控制。采用該控制方式的分布式電源實時檢測本地變量,根據各自的下垂特性輸出相應的功率。在該控制方法下,當微網中存在功率波動時,各微電源動態調節各自出力,共同參與微網電壓頻率調整。
4 微網的下垂特性
4.1 常規微電源有功-頻率下垂特性
圖2所示為微電源下垂示意圖。微電源并網逆變器輸出的有功功率為[14]。
(1)
由公式(1)可知,微電源并網逆變器的有功功率輸出主要取決于電壓矢量間的功角差δP,通過控制功角,可以達到控制有功功率的改變。因此,可在微電源并網逆變器的控制策略中加入有功功率-頻率下垂控制方法,模擬傳統的同步發電機的控制特性,對微電源的輸出功率進行控制。
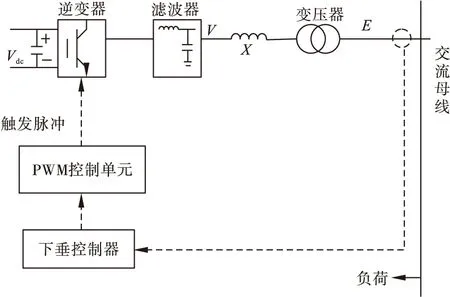
圖2 常規微電源下垂控制示意圖
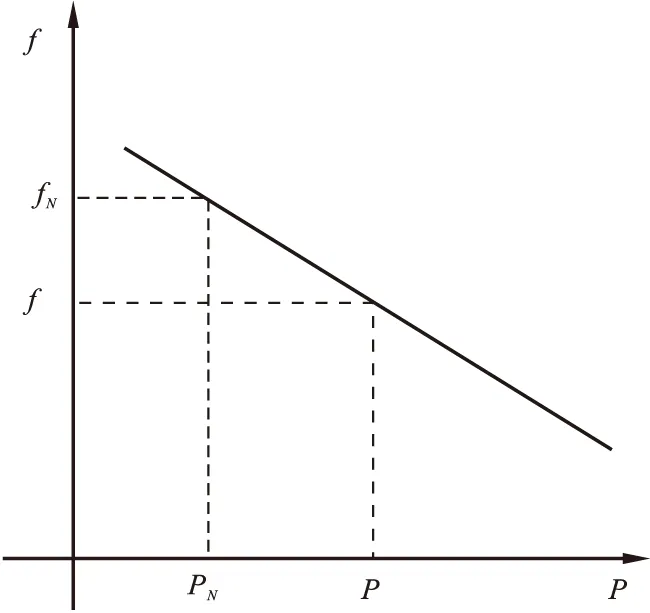
圖3 微電源有功功率-頻率下垂特性
圖3所示為微電源的有功功率-頻率下垂特性。設曲線的斜率為m,交流母線的額定頻率為f,在額定頻率f下對應的功率為交流母線的輸出額定功率PN。則當系統運行在頻率f時,根據數學特性可以得出反應有功功率-頻率下垂特性的表達式:
f-fN=-m(P-PN)
(2)
4.2 改進有微電源的功功率-頻率下垂控制
從圖3以及數學表達式(3)可以看出,當微電源斜率也即下垂系數m固定時,頻率的變化必然會引起功率的變化,當系統運行頻率大于額定頻率時,則系統的有功功率則會小于系統的額定功率;當系統的運行頻率大于額定頻率時,則系統的有功功率則會大于額定功率。
所以,在系統的運行過程當中,當負荷需求變化時,微電源輸出的有功功率則會增大或者減少,而有功的變化必定會造成微電網頻率的偏差,嚴重時可能影對電網造成解列。根據國標《GBT 15945-2008 電能質量電力系統頻率偏差》標準,規定微網運行時頻率偏差應維持在±0.2~±0.5Hz范圍內。因此,為保證微電源輸出有功功率P在0≤P≤Pmax范圍內,頻率仍然滿足電能質量的要求,可以按照下述條件得到一種改進的有功功率-頻率下垂控制方法:
(1)當微電源輸出有功功率P=0時,對應的頻率f=fmax;
(2)當微電源輸出的有功功率P=PN時,對應的頻率f=fN;
(3)當微電源輸出的有功功率P=0時,對應的頻率f=fmin;
根據上述三個條件,提出了基于拉格朗日插值法的改進有功功率-頻率下垂控制公式:
(3)
從公式(4)可以看出來,拉個朗日插值法實際上是多點逼近方法,改進之后的頻率特性受PN,Pmax,Pmin,fN,fmax,fmin共同作用,抗擾動能力明顯比公式(3)所揭示的頻率特性要強。
通過以上分析可知,微電源并網逆變器采用上述改進有功功率頻率下垂特性控制,可以適當減小交流母線處頻率的偏移,使微電源具有一定的調頻能力,保持并網。
5 仿真驗證
5.1 原控制策略下的仿真級果
為了驗證改進有功功率-頻率下垂特性控制方法的有效性和正確性,在Matlab中搭建了如圖4所示的Droop控制小系統[15]。仿真中用直流源代替,負荷load1和load2都采用恒功率負荷。仿真總時間為1s,其中在0.3~0.6s切除load2。
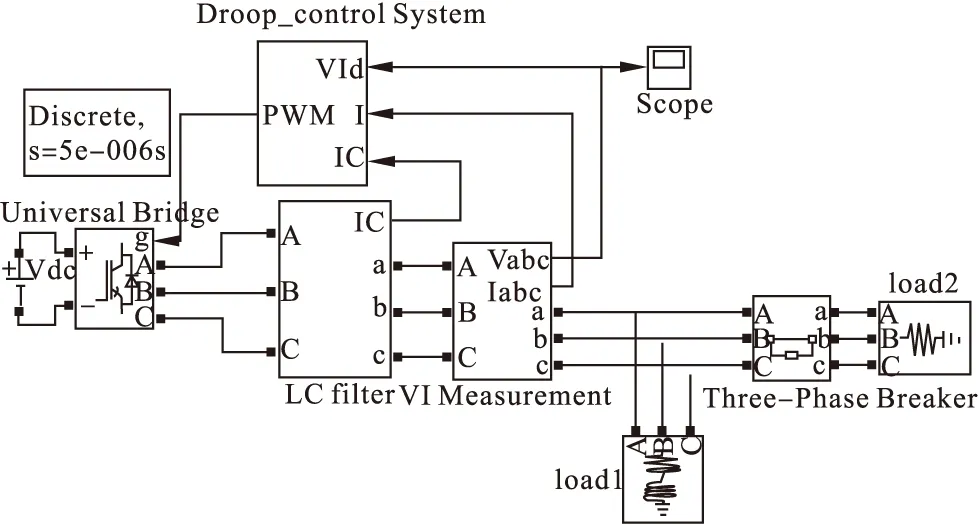
圖4 Droop控制仿真模型
具體的控制算例參數設置如表1:
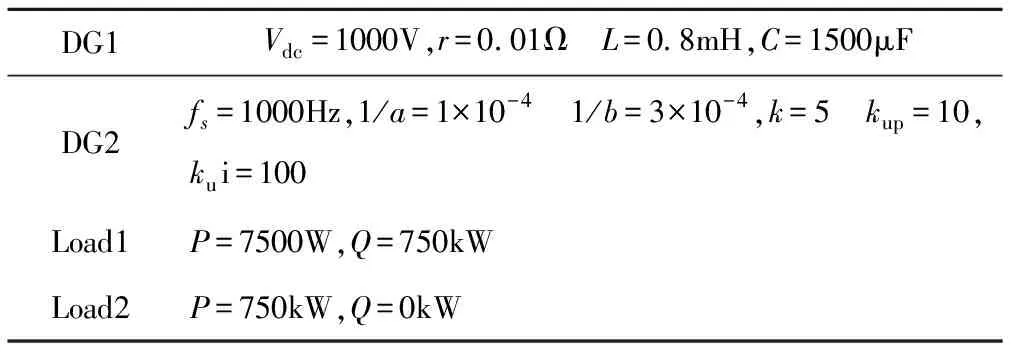
表1
仿真結果如下:
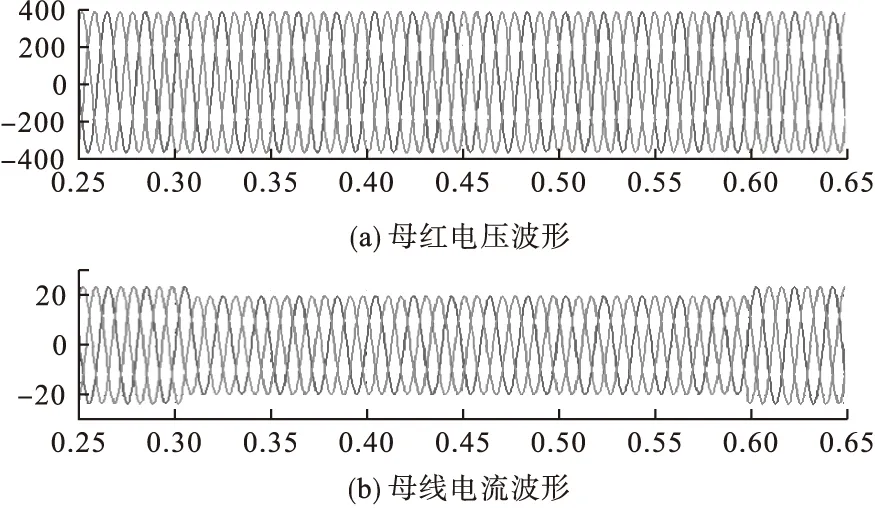
圖5 母線電壓電流波形
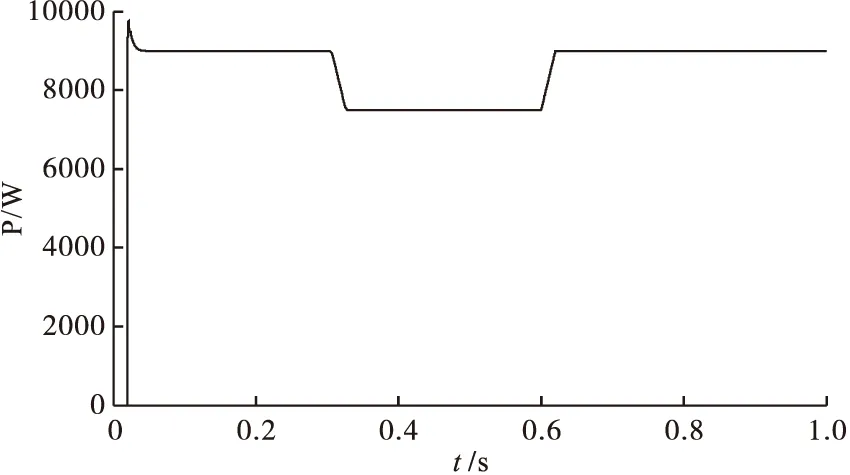
圖6 DG輸出有功功率
從仿真結果圖6~7可以看出,0.3~0.6s切除load2,DG發出的有功功率從9000W減少到了7500W;DG發出的無功功率從750W增加到了860W,但是最終都能趨于穩定值。從圖5可以看出,母線電壓略有下降,但是下降幅度不大,從圖(8)可以看出,頻率由50Hz增加到了50.15Hz,波動范圍為0.15Hz。由此可見,Droop控制模型滿足P-f和Q-V控制原理,并且能保證電壓變化不大于5%,頻率變化不大于1%。以上仿真表明,所建立的Droop控制模型的有效性。
5.2 改進之后的仿真結果
原控制算法的仿真結果已經驗證了建立Droop模型的有效性。在此基礎上,利用所提出的朗格朗日插值法,建立的改進之后的有功功率-頻率模型。最后得到的仿真結果如圖9所示。
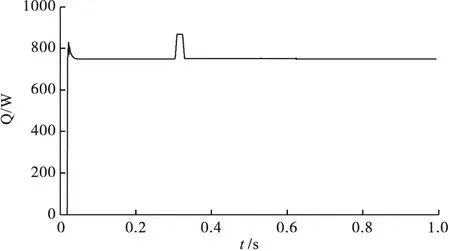
圖7 DG輸出無功功率
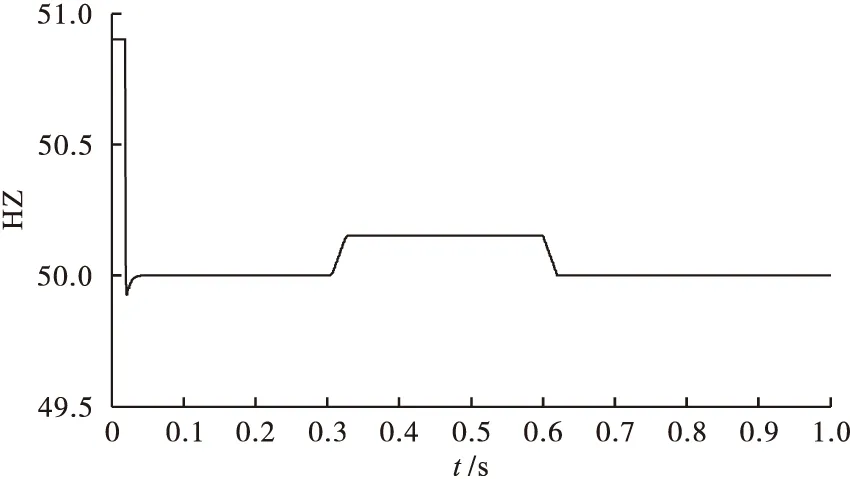
圖8 系統頻率
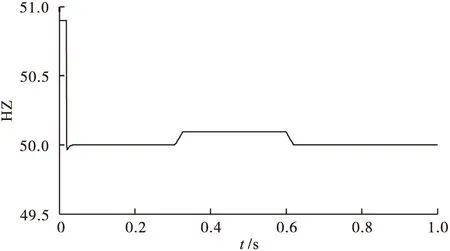
圖9 改進算法之后的系統頻率
通過圖8與圖9的比較分析可知,在負荷減少相同的情況下,下垂系數恒定時,系統的頻率在0.3~0.6s時間內由50Hz上升到50.15Hz,頻率波動為0.15Hz;改進算法之后的系統頻率在0.3~0.6s時間內由50Hz上升到50.1Hz,頻率波動為0.1Hz。波動范圍明顯比當下垂系數固定時的頻率波動要小。雖然兩種情況下頻率波動范圍都在允許范圍內,但是很顯然頻率波動變化越小,對電網的沖擊也就越小,改進算法之后的頻率下垂特性具有一定的優越性。從仿真結果頁可以看出,在負荷減少相同的情況下,采用改進之后的有功功率-頻率下垂控制方法可以減少頻率波動,提高微網的電能質量。
6 結語
本文針對微電網中常規下垂特性的不足,提出了一種改進之后的下垂特性控制方法,其中主要研究的是有功功率-頻率下垂特性。通過Matlab仿真,驗證了改進算法的可行性,仿真的結果表明,系統頻率的偏移有了改善,但是這種新型的算法是建立在以往數據基礎之上提出的,缺乏一定的實時性,這個缺點在以后的研究中有待進一步改善。
[1] 張建華,黃偉.微電網運控制與保護技術[M].北京:中國電力出版社,2010:2.
[2] 魯宗相,王彩霞,等.微電網研究綜述[J].電力系統自動化,2007,31(19):100-106.
[3] 趙宏偉,吳濤濤.基于分布式電源的微網技術[J].電力系統及其自動化學報,2008,20(1):121-128.
[4] 王亞楠.含分布式電源的微電網控制策略研究[D].昆明理工大學,2011.
[5] 丁明,王敏.布式發電技術[J].電力自動化設備,2004,24(7):31-36.
[6] 習朋,李鵬,劉金鑫.微網并網時的經濟運行研究[J].電力科學與工程,2011,27(9):1-7.
[7] 王成山,肖朝霞,等.微網中分布式電源逆變器的多環反饋控制策略[J].電工技術學報,2009,24(2):100-106.
[8] 何建劍,吳為麟.分布式電源與電網并聯運行逆變系統的設計[J].電氣應用,2008,27(3):78-82.
[9] Katiraci F,Iravani M Lchn P W.Micro-grid autonomous operation during and subsequent to islanding process[C].IEEE Trans On Power Delivery,2005,20(1):11-15.
[10] 肖朝霞.微網控制及運行特性分析[D].天津大學碩士學位論文,2008.
[11] 李福東,吳敏.微網孤島模式下負荷分配的改進控制策略[J].中國電機工程學報,2011,31(13):18-25.
[12] 紀明偉,張興,楊淑英.基于電壓源逆變器的微電網控制策略[J].合肥工業大學學報,2009,32(11):1678-1681.
[13] 吳婷婷.分布式發電系統并網逆變器控制方法研究[D].長安大學,2007.
[14] 李鵬,張玲,王偉.微網技術應用與分析[J].電力系統自動化,2009,33(20):109-115.
[15] 舒海蓮.微電網運行特性及其控制研究[D].上海電力學院,2011.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32