仿人預測控制在雙足機器人步行控制中的應用*
2014-09-25 08:03:58,
傳感器與微系統 2014年3期
,
(貴州財經大學 數學與統計學院,貴州 貴陽 550025)
0 引 言
迄今為止,雙足機器人已得到了很大發展,就動態步行的實現方法可以分為三類:傳統的有動力驅動的機器人,被動行走機器人,二者的結合半被動步行。而傳統的有動力驅動的機器人的動態步行是基于零力矩點(zero moment point,ZMP)原理實現的,ZMP軌跡是影響機器人步行穩定性的重要因素,很多步行控制方法目的都是為了優化機器人的實際ZMP軌跡,以實現穩定行走[1~4]。基于ZMP的步行控制的傳統方法有地面反作用力控制、落腳點控制和模型ZMP控制等。目前,最先進的控制方法是基于ZMP的預測控制,它模擬人行走要利用未來路況信息的原理,利用未來目標ZMP的信息設計預測控制器,對機器人的質心運動進行控制,以實現實際ZMP對目標ZMP的跟蹤。預測控制具有人大腦對人行走控制的思維,因而,在先進的機器人ASMIO上得到了成功的應用[5]。
然而,預測控制也存在缺點,預測控制需要比較精確的預測模型,在環境擾動導致模型失配時預測控制的性能下降較快。特別是雙足機器人的行走環境復雜,要建立精確的動力學模型是不可能的,并且任何控制面對不同的控制對象,也不是萬能的。本文作者在文獻[6]中對利用仿人智能控制改進預測控制,做了一些探索。本文進一步研究在雙足機器人步行控制中引入仿人智能控制的必要性和仿人智能控制改進預測控制的可行性,并設計了仿人預測控制器,最后通過仿真實驗驗證了新的控制器對雙足機器人步行控制的有效性。
1 預測控制在步行控制中的應用
1969年,Vukobratovic M等人針對雙足機器人行走的穩定性,首次提出了ZMP的概念[7]。ZMP點是指腳底受到的地面反力的合力相對于該點的力矩,沿地面方向力矩分量為零的點。當機器人穩定行走時,ZMP點始終位于足底形成的支撐多邊形中。迄今為止,ZMP 行走方法已得到廣泛的應用并取得了顯著的成就[1~3]。與人行走控制身體重心(或質心)獲得穩定性類似,機器人行走也可以通過控制質心來調節ZMP的運動軌跡,使ZMP位于支撐凸多邊形中。然而,在動態步行中,質心的投影在某一時刻可以超越支撐多邊形,致使ZMP點可能位于支撐多邊形外,從而導致行走不穩定[4]。所以,這就需要在線控制質心運動以生成穩定步行模式。
圍繞質心軌跡的控制產生了很多方法[8],這些方法計算量大,只能離線生成步行模式。考慮到人行走要利用未來路況信息的原理,機器人專家們把目光轉向預測控制,這種控制是Sheridan T B于1996年為了解決工程難題提出的[9],是一種利用未來的信息進行控制的方法。到1985年,Katayama T等人把預測控制方法拓展到多輸入多輸出(MIMO) 伺服系統并得到了較完善的結果[10]。2003年,日本學者Kajita S等人成功地把它運用到雙足機器人領域,提出了基于預測控制的步行模式生成理論[3],并在文獻[2,3]中進行了研究,也在目前最先進的雙足機器人ASMIO上得到了成功應用。基本原理是,通過伺服系統的反饋功能利用未來目標ZMP 信息設計預測控制器,對質心運動進行控制來調節實際ZMP軌跡對目標ZMP軌跡的跟蹤。這一理論是在線解決步態跟蹤誤差及其穩定性的有效方法,也符合人行走要利用未來路況信息的原理。
然而,預測控制依賴于預測模型的準確性,在環境擾動導致模型失配時預測控制的性能下降較快。為了解決這個問題,很多文獻從理論上探索了一些方法[11],比如:自適應預測控制、遺傳算法預測控制、神經網絡預測控制和專家系統預測控制等。但是,這些方法只是在理論上對預測控制作了改進,在實際應用時由于算法復雜,實時性差,限制了它們在機器人領域的應用。
2 預測控制與仿人智能控制的結合
2.1 引入仿人智能控制的必要性
1983年,重慶大學周其鑒教授在多國儀器儀表國際學術會議上發表了仿人智能控制的原型算法[12]。其后,經過李祖樞教授等近30年堅持不懈的努力,不斷發展和完善了仿人智能控制理論[13],并在工業難控對象的應用中取得了顯著成果,已形成了通用工業智能儀表[14]。尤其已在單級擺和二級擺的擺起倒立運動控制中得到了成功應用[15],仿人智能控制具有人的思維特點,它模擬有經驗的控制專家的行為,不需要建立精確的數學模型,通過控制器自身的智能行為去應付對象和環境的各種變化。此外,這種方法具有算法速度快、準確的特點,滿足在線實時性要求。
如圖1所示,分析雙足機器人在行走過程中腿的運動,在伸縮力 的作用下腿可以伸縮,相當于機器人膝關節的彎曲或伸展而產生質心的上下運動,這相當于人們所熟悉的倒立擺的運動。因此,通常將三維空間機器人近似為一個集中了所有質量的點和連接該質點與支撐點的無質量的腿組成的倒立擺[4]。由此,從仿人智能控制算法對倒立擺的成功控制而言,它完全可以引入到雙足機器人的穩定行走控制中。
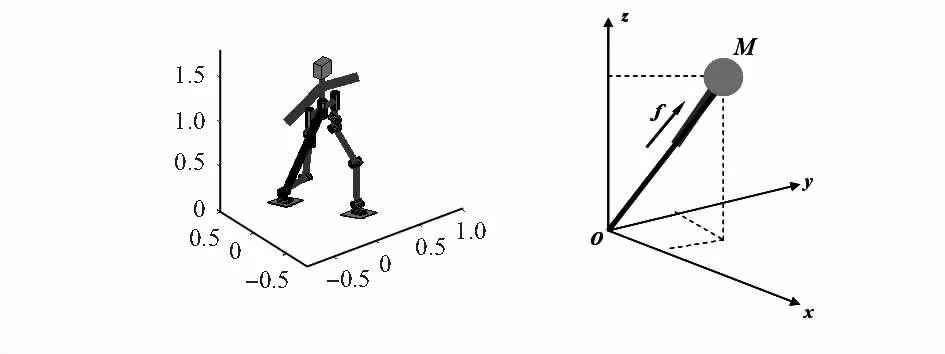
圖1 雙足機器人的倒立擺近似模型
第1節已分析預測控制在機器人行走控制中的應用。在行走控制中,預測模型用的是預估的狀態空間模型,這與實際機器人系統的動力學模型具有高階非線性的特點是有差別的。簡化后的動力學模型雖然計算簡單實時性強,但是與實際系統存在模型失配的問題,特別是還存在環境擾動等因素情況下,這種模型失配問題會進一步加大。但預測控制用在實際系統中需要比較精確的預測模型,在模型失配時預測控制的性能下降較快。由于仿人智能控制對模型的精確性依賴程度不高并對誤差有較強的抑制能力,所以,預測控制與仿人智能控制的結合能克服環境擾動和模型失配的缺點。
2.2 仿人預測控制系統設計
仿人智能控制器模擬人的主動開環控制和強時變控制,預測控制模擬人行走要利用未來路況信息的原理,其共同特征是主動時變控制。兩者的結合將是對人的控制思維特點的較全面模擬。本文提出的仿人預測控制器是基于對人自身行走控制的認識:人在行走過程中當身體重心超出極限時甚至處于危險時,會毫不猶豫地調整身體重心恢復平衡;而在步行活動處于正常范圍時則處于無意識或有意識的經驗控制,使波動盡量小。這種人意識處理的結果是:身體活動在正常區間運行平穩,突發事件瞬間切換,能夠確保行走時的身體平衡,環境擾動時也能保證平穩行走。這種具有人思維的控制策略對于機器人的穩定行走控制至關重要。如圖2所示,為仿人預測控制系統原理框圖。
圖2中,pref為目標ZMP,pvar為擾動形成的可變ZMP,uh(t)為仿人智能控制器的輸出,up(t)為預測控制器的輸出,p為實際ZMP軌跡。仿人預測控制器的工作原理如下:在系統工作時仿人智能控制器和預測控制器同時工作,仿人智能控制設置較寬的誤差控制帶,其作用是用最短的時間將系統帶入正常狀態;預測控制的作用是利用預測模型將系統穩定在正常狀態,并使控制曲線最優。控制量切換要選擇合適的時機對這2種控制信號進行切換。
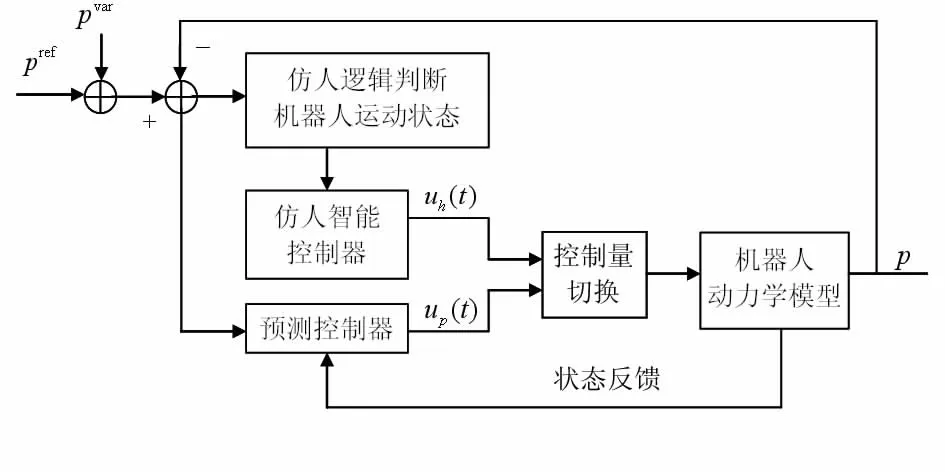
圖2 仿人預測控制原理框圖
對圖1所示的雙足機器人建立動力學模型為
(1)

(2)
3 仿真實驗驗證
仿人預測控制系統根據ZMP誤差及其變化量切換控制變量,實施對機器人動力學系統的控制,以使實際ZMP輸出能很好地跟蹤帶可變ZMP的期望值。表1所示為誤差相平面上的特征和相應的控制模態。
表1中,K4+為強正控制力,起到抑制負超調的作用,它的值越大,對應的超調量越小;K4-為強負控制力,起到對誤差變化率的調節作用,使之進入誤差變化率零帶;K3+為較強正控制力,其作用是在進入穩態響應過程中,可以減少延遲時間,使系統響應速度快;K3-為較強負控制力,影響系統正超調處的運動狀態,促使響應曲線向著誤差零帶運動并加速;K2+為次強正控制力,在這段控制區域,系統響應獲得了快速上升;K2-為次強負控制力,其作用是使系統加速向誤差零帶運動;K+為較弱正控制力,K-為較弱負控制力,此時系統有回到預測控制的傾向;對系統而言,加大K+和K-作用可以使系統盡早進入穩態范圍,這時預測控制器輸出up(t)對整個步行控制系統起控制作用。
下面用期望ZMP帶矩齒形擾動pvar=-0.08和高頻波擾動pvar=0.08 sin 50t時的情況對如圖2所示的仿人預測控制系統進行驗證。相平面分區控制參數取值為:K4+=8,K3+=6,K2+=3,K+=1,K-=-1K2-=-3,K3-=-6,K4-=8,考慮到實際情況,誤差e0和誤差變化率Δe0取值為e0=±0.1,Δe0=±0.1。
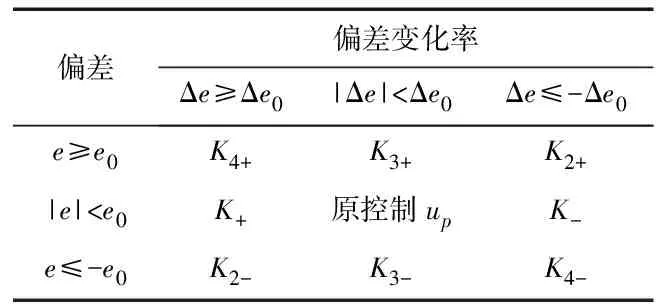
表1 誤差相平面上的特征變量與控制模態
圖3所示結果顯示對具有擾動的ZMP,仿人預測控制系統能實現較好地跟蹤。對具有復雜擾動的可變ZMP,控制模態的設計會更復雜。根據仿人智能控制對誤差的強抑制能力,只要控制模態設計合理,仿人預測控制系統仍然可實現對期望ZMP的跟蹤。
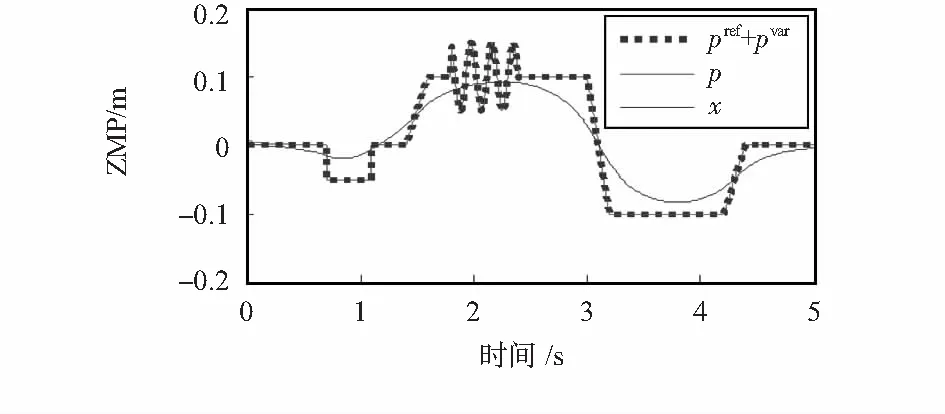
圖3 仿人預測控制系統對期望ZMP的跟蹤情況
4 結 論
本文從雙足機器人的三維倒立擺簡化模型和仿人智能控制在倒立擺控制中的成功應用方面,研究了在雙足機器人行走控制中完全可以引入仿人智能控制。論證了仿人智能控制可以改進預測控制因模型失配而性能下降的缺點,并設計了仿人預測控制器。由于仿人智能控制器模擬人的主動開環控制和強時變控制,預測控制模擬人行走要利用未來路況信息的原理,設計新的仿人預測控制器的目的,是為了讓機器人的步行能力具有人的思維模式和利用未來路況信息。最后,通過仿真實驗驗證了新的控制器對雙足機器人步行控制的有效性。
參考文獻:
[1] Vukobratovic M,Borovac B.Zero-moment point-thirty five years of its life[J].International Journal of Humanoid Robotics,2004,1(1) :157-173.
[2] Kajita S,Morisawa M,Harada K,et al.Biped walking pattern generator allowing auxiliary ZMP Control [A]∥Internationonal Conference on Intelligent Robots and Systems,Beijing,China,2006:2993-2999.
[3] Kajita S,Kanehiro F,Kaneko K,et al.Biped walking pattern ge-neration by using preview control of ZMP[C]∥Int’l Conference on Robotics & Automation,Taiwan,china,2003:1620-1626.
[4] 梶田秀司.仿人機器人[M].管貽生,譯.北京:清華大學出版社,2007.
[5] 于秀麗,魏世民,廖啟征.仿人機器人發展及其技術探索[J].機械工程學報,2009,45(3):71-75.
[6] 敬成林,李祖樞,薛方正.雙足機器人穩定行走的仿人預測控制研究[J].計算機工程與應用,2010,46(23):21-24.
[7] Vukobratovic M,Juricic D.Contribution to the synthesis of biped gait [J].IEEE Transactions on Biomedical En-gineering,1969,16(1) :1-6.
[8] Kyung N K,Kim J G,Huh U Y.Stability experimental of a biped walking robot with inverted pendulum[C]∥The 30 th Annual Conference of the IEEE Industrial Electronics Society,Bustan,Korea,2004: 247522479.
[9] Sheridan T B.Three models of preview control[J].IEEE Tran-saction on Human Factors in Electronics,1966,7(2):91-102.
[10] Katayama T,Ohki T,Inoue T,et al.Design of an optimal contro-ller for a discrete time system subject to previewable deman-d[J].International Journal of Control,1985,41(3):677-699.
[11] Kittisupakorna P,Thitiyasooka P,Hussainb M A,et al.Neural network based model predictive control for a steel pickling process[J].Journal of Process Control,2009,19(4):579-590.
[12] Zhou Qijian,Bai Jianguo.An intelligent controller of novel de-sign[C]∥Proc of a Multi-National Instrumentation Conference,Part 1,Shanghai,China,1983:137-149.
[13] 李祖樞,涂亞慶.仿人智能控制[M].北京:國防工業出版社,2003.
[14] 李祖樞.仿人智能控制研究20年[C]∥1999年中國智能自動化學術會議論文集(上冊),北京:清華大學出版社,1999:20-23.
[15] 李祖樞.仿人智能控制理論與多級擺的擺起控制[C]∥人工智能回顧與展望,北京:科學出版社,2006:174-207.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
光學精密工程(2016年6期)2016-11-07 09:07:19
