線陣CCD圖像傳感器在瞬時車速測量中的應用
2014-09-25 08:19:26周尚儒李麗宏張劍勇
傳感器與微系統 2014年9期
周尚儒, 李麗宏, 張劍勇, 楊 軍
(1.太原理工大學,山西 太原 030024;2.山西萬立科技有限公司,山西 太原 030032)
0 引 言
目前,公路計重系統的稱量設備多數為動態汽車衡,據調研,目前已安裝的動態軸重稱量設備的典型誤差為5 %[1,2],但實際安裝使用后均達不到。其原因主要是安裝現場的條件遠達不到產品的設計標準,主要是廠家標稱精度的測試數據是在保證勻速通過的前提下得到的,而現場使用時車輛卻不是勻速的。影響動態稱重精度的因素較多,例如:車輛速度、車輛加速度、秤臺寬度、車輛振動等[3,4],造成測量結果誤差大和不準確,導致公路計重系統不具有很強的說服力和廣泛的公信度,因此,提高車輛動態稱重精度具有重要的理論和實際意義。
本文提出了一種以CCD為前端測量裝置采集汽車的圖像信號,以單片機為核心處理芯片進行相關運算的汽車瞬時速度測量的方法,并將測量的速度和加速度對稱重數據進行相應的補償[5],實驗證明:經補償后的動態稱重系統精度大大提高。
1 系統組成原理
本系統可對車輛瞬時速度進行測量,其基本原理是:在道路同一側相距一定距離安裝2只CCD,每只CCD前端均安裝合適的鏡頭[6],當檢測到有汽車通過時,兩路傳感器以一定的頻率同時采集汽車通過傳感器時產生的圖像信號,經濾波、放大處理和A/D轉換后送給C8051F010單片機[7]進行相關運算,算出車輛同一位置處2組信號波形的相位差,由于采樣的時間間隔已知,可以算出汽車通過2只傳感器的時間差τ;2只傳感器安裝的距離固定為L,則v=L/τ可計算出汽車速度[8,10]。將采集的圖像信號實時分段進行相關運算,即可計算出車輛的瞬時速度系統原理如圖1所示。
2 相關算法
2.1 基本原理
相關函數用來研究2個序列的相似性。通常在實際應用中這2個信號往往是由同一原因產生的,由于接收點的位置不同,信號在x(t)與y(t)序列中出現的時間也不同,因此,可利用2個序列的線性相關性來找出信號的延遲時間。相關算法的原理是:存在2個連續的隨機信號x(t)與y(t),當這2個信號是實數且為周期函數時,相關函數可定義為[11]
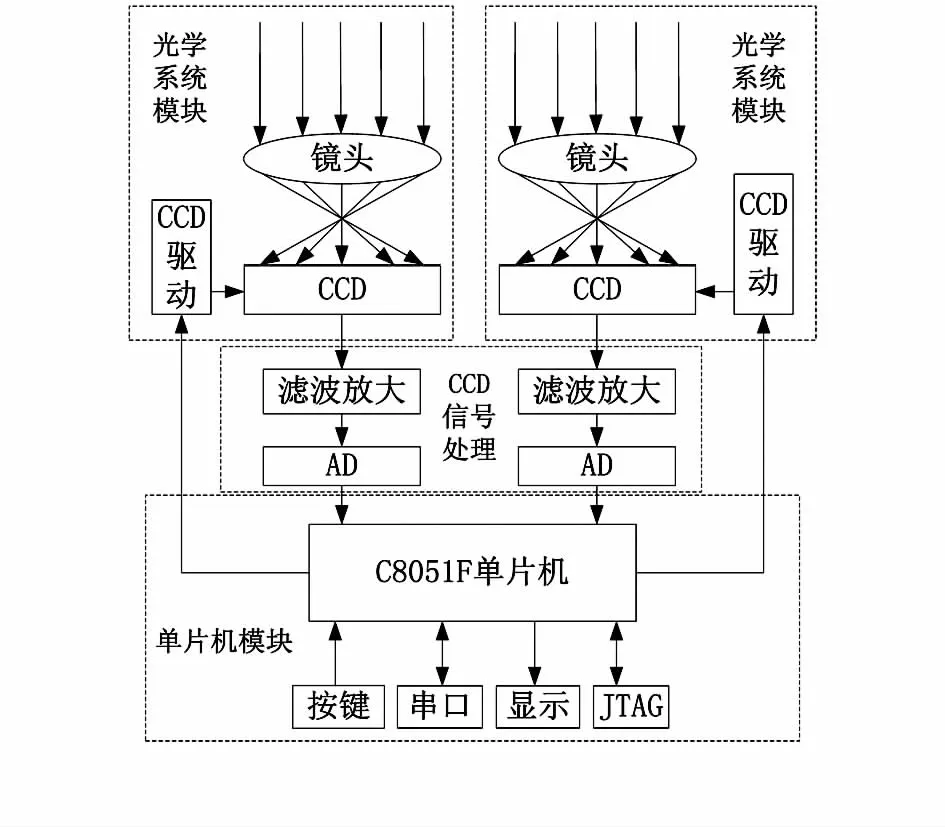
圖1 CCD測速原理圖
(1)
通常在計算時,由t=0開始,因此,式(1)可寫成
(2)
如果x(t)與y(t)是同一信號,則稱Rxy(τ)為自相關函數;否則,稱Rxy(τ)為互相關函數。若x(t)與y(t)是緊密相關或十分相近,Rxy(τ)的波形將會有一個很突出的峰值出現。Rxy(τ)的大小表示2組波形相似程度,當Rxy(τ)達到峰值時,表明此時2組波形的相關度最大,也就是說2組波最相似。在本系統中從傳感器采集的兩路信號僅差一個時間延遲,故在有車輛通過時將采集的兩路數據作相關運算,并記錄移位個數,當移位到2組數據的對應點都相同時,相關度最大,通過這一最大的相關值對應的移位個數,即可求出時間差τ。因而,對兩路信號作相關運算,找出其相關值最大時的移位個數成為系統的關鍵。
對于C8051F010內的信號處理,需要先將公式(2)離散化,然后對離散數據作相關運算
(3)
其中,rxy(m)為x(n)和y(n)的互相關函數。該式表示rxy(m)在時刻m的值為將x(n)保持不變,而y(n)移動m個抽樣周期后2個序列對應相乘再相加的結果。
2.2 算法改進
實際使用式(3)時,由于所取的數據長度是有限的一部分,當對2列有限的數據計算移位個數尋找rxy(m)的最大值時,具有一定的局限性,而且計算結果不準確,故將式(3)改寫為
(4)
其中,N為作相關運算相乘的次數,即為采樣個數;當Rxy(m)取最大值時的m即為2組數列的移位個數,m乘以采樣間隔T就可以得到兩列波形的時間差τ。
實際使用離散形式的互相關函數為[8]
(5)
其中,δ為對信號采樣的時間間隔;N為采樣序列的總組數;m,n為自然整數。
由于在程序運行過程中,計算量過大導致系統運行速度降低,故對式(5)進行優化得
(6)
此時,Rxy(m)取最小值時,2組數據最相關,故此時的m即為2組數列的移位個數。這種優化算法在實際應用中具有準確度高,計算速度快等優點。
3 實驗結果與分析
當有車輛通過時,傳感器采集的兩路信號僅差一個時間延遲,將此兩路信號作相關運算,計算出兩路信號的時間差。對現場采集信號作相關運算,結果如圖2所示,第一個波形表示第一路CCD所采集到車輛信號的數據,第二個波形表示第二路CCD采集到車輛信號的數據,最后一個波形表示前2組數據作相關運算的波形,波形的峰值表示2組數據的最大的相似度,此時對應的橫坐標即是2只傳感器對物體同一部位采集的相位差n=20,相位差n乘以AD的采樣周期T即為兩路信號的時間差τ,此時車輛的速度為v=L/τ。

圖2 相關測速仿真圖
將兩路CCD采集的車輛所有數據分段后作相關運算,即可計算出車輛的瞬時速度。如圖3所示,第一個波形表示第一路CCD所采集到整車車輛信號的數據,第二個波形表示第二路CCD采集到整車車輛信號的數據,最后一個波形表示前兩組數據分段后作相關運算的波形,波形中標出來的各值即為分段后兩路信號的各相位差ni(i為分段計算次序),分別將ni乘以AD的采樣周期T即為兩路信號的時間差τi,此時車輛的瞬時速度為vi=L/τi。

圖3 瞬時速度測量仿真圖
在實際應用中,由于L=10 cm,T設置為2 ms,每次取200個數據進行相關處理,結合圖3,可計算出車輛的速度和加速度,如表1所示。
由重量加速度補償公式[7,8]即可計算出車輛總重
(7)
其中,G為修正后的車輛總重,G0為車輛動態測量結果,ΔG為車輛加速度補償值,a為車輛加速度,H為重心距地面的距離,M為車輛動態總質量,L1,L2分別為汽車重心到前、后軸的水平距離。
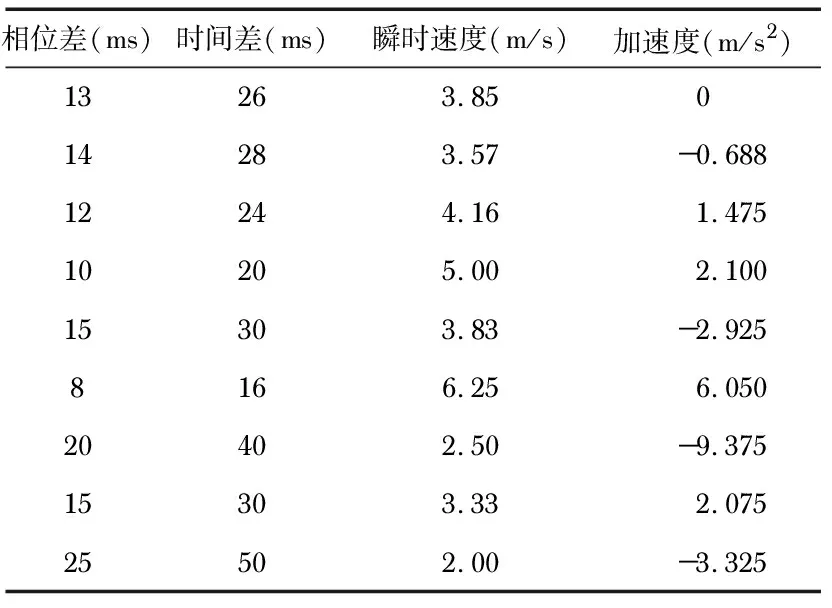
表1 現場采集數據分析
4 結 論
本文給出了一種測量汽車瞬時速度的方法。通過實驗發現,利用優化后的相關算法可以很方便地計算出2組圖像信號的相位差,同時還可以滿足對車輛瞬時速度的精確度要求,具有結構簡單、測量方便、精度高等優點。
但是該系統還存在著一些不足之處,如,相關算法的計算公式較復雜,運行時單片機內存使用率高;對CCD硬件系統缺乏足夠的研究。如果能進一步改進該系統的硬件結構和提高A/D轉換的精度,系統的測量精度將大大提高。
參考文獻:
[1] 邵勇強.動態汽車衡存在的問題及對策[J].計量與測試技術,2013,40(1):7-9.
[2] 肖維明.高速公路車輛動態稱重設備應用研究[J].中國交通信息化,2010(2):141-142.
[3] 王 昶.動態稱重系統的動態干擾因素分析和抑制[J].中國交通信息化,2011(5):74-79.
[4] Li Lihong, Wang Yajiao.Research of dynamic axle truck scale sampling data selection method[C]∥2010 International Confe-rence on Future Industrial Engineering and Application,ICFIEA 2010,2010:187-190.
[5] 李麗宏,朱 旭.淺析加速度對動態稱重結果的影響[J].技術交流,2012,41(3):41-44.
[6] 薛 華,李東濤,熊永超.CCD 技術在非接觸檢測中的應用[J].煤礦機械,2006,27(8):162-165.
[7] 周維龍.基于80C51單片機控制的CCD視頻信號二值化電路[J].湖南冶金職業技術學院學報,2007,7(1):75-77.
[8] 胡廣書.數字信號處理[M].北京:清華大學出版社,2012:33-39.
[9] Liu Yujia, Zhang Yumei.An adaptive algorithm for cross-correlation velocity measurement[J].Proceedings of ISICT 2012,2012(7):96-100.
[10] 陳 佳.基于單幅運動模糊圖像的車速測量方法研究[J].制造業自動化,2013,35(3):22-27.
[11] Li Zhanpeng, Fang Bin.Application of cross-correlation in velocity measurement of rain-water in pipe[J].Advances in Intelligent and Soft Computing, 2011,100:587-594.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45