測(cè)量誤差對(duì)水下地形匹配性能的影響研究*
2014-09-20 09:27:28高永琪
彈箭與制導(dǎo)學(xué)報(bào) 2014年1期
關(guān)鍵詞:深度
高永琪,劉 洪,張 毅
(1海軍工程大學(xué),武漢 4300332;2 92858部隊(duì),浙江寧波 315800)
0 引言
水下地形匹配輔助導(dǎo)航技術(shù)[1-5]是解決潛航器水下長(zhǎng)期導(dǎo)航問題的有效方法之一。基于PMF算法[6]的水下地形輔助導(dǎo)航系統(tǒng),其原理如圖1所示。通過PMF算法對(duì)事先存入潛航器中的預(yù)定區(qū)域的地形數(shù)據(jù)和借助測(cè)深測(cè)潛傳感器實(shí)時(shí)測(cè)得的地形數(shù)據(jù)進(jìn)行濾波處理,得到潛航器的當(dāng)前位置,從而對(duì)慣導(dǎo)系統(tǒng)(INS)輸出進(jìn)行誤差修正,控制航行器按照指定航線航行。由于潛航器在航行過程中,存在深度、速度和航向的測(cè)量誤差,這些誤差將直接影響水下地形匹配性能。為此,文中在兩塊不同的真實(shí)地形上運(yùn)用PMF算法對(duì)這些誤差進(jìn)行了仿真研究,以確定各種不同測(cè)量誤差對(duì)水下地形匹配性能的影響程度,進(jìn)而為水下地形匹配導(dǎo)航技術(shù)的工程應(yīng)用提供理論依據(jù)。
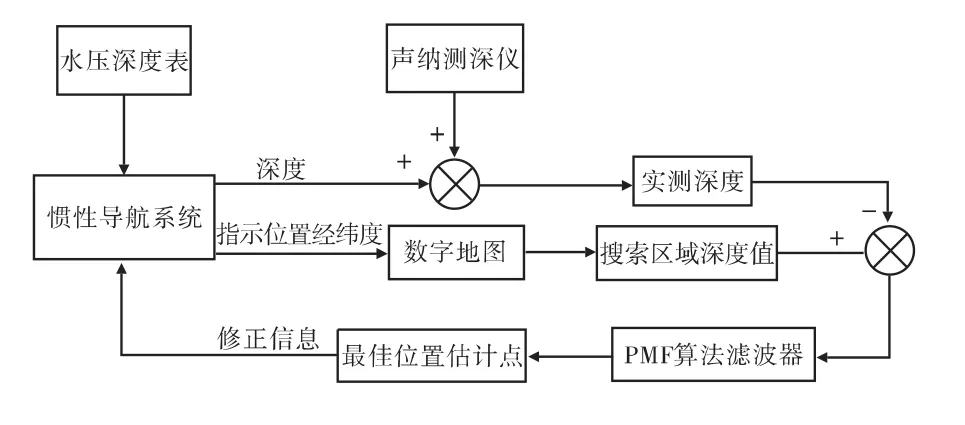
圖1 基于PMF算法的水下地形導(dǎo)航系統(tǒng)原理圖
1 算法模型
PMF算法將矩形搜索區(qū)域離散化為有限個(gè)小網(wǎng)格,從而使遞推貝葉斯積分簡(jiǎn)化為在搜索區(qū)域上的有限網(wǎng)格黎曼和。將狀態(tài)變量在每個(gè)網(wǎng)格的概率作為網(wǎng)格點(diǎn)的權(quán)值,用這些帶權(quán)值的網(wǎng)格點(diǎn)集來逼近后驗(yàn)概率密度,從而不受非線性、非高斯問題的限制,從理論上解決了由于非線性模型的線性化近似所帶來的各種問題,并且達(dá)到減少解算時(shí)間和復(fù)雜度的目的。
給定二維非線性模型:

式中:δxk表示k時(shí)刻潛航器實(shí)際位置與指示位置的偏量,δxk=(δxk,N,δxk,E),xk=(xk,N,xk,E),xk,N和xk,E分別表示k時(shí)刻潛航器位置在正北和正東方向的坐標(biāo)分量,h(xk)為在xk這點(diǎn)位置的真實(shí)深度,vk為隨機(jī)過程噪聲,wk為隨機(jī)觀測(cè)噪聲。

其中 j=1,…,N,i=1,…,N,將權(quán)值進(jìn)行歸一化:
測(cè)量更新:

將權(quán)值進(jìn)一步歸一化:
然后返回式(3)再進(jìn)行重新計(jì)算,繼續(xù)迭代,直到達(dá)到規(guī)定次數(shù)時(shí)結(jié)束循環(huán)。
2 測(cè)量誤差對(duì)匹配性能的影響
測(cè)深聲納測(cè)量潛航器與海底的距離,并將這些數(shù)據(jù)與壓力深度計(jì)測(cè)得的潛航器深度相加,得到對(duì)應(yīng)位置點(diǎn)的實(shí)際深度。所以深度測(cè)量誤差的來源具有多樣性[7]。速度和航向測(cè)量誤差主要是由慣導(dǎo)系統(tǒng)的陀螺儀和加速度計(jì)誤差所引起的,他們與安裝誤差、刻度系數(shù)誤差和漂移等有關(guān)。顯然,這些誤差的大小與測(cè)深聲納和慣導(dǎo)系統(tǒng)設(shè)備有關(guān)。在選擇硬件設(shè)備時(shí),測(cè)量精度和價(jià)格是要考慮的兩個(gè)重要因素。一般地,設(shè)備的價(jià)格隨精度的提高而增加,但由于數(shù)字地圖本身就存在一定誤差,所以一味追求高精度的設(shè)備并不是提高匹配性能的最佳途徑。通過應(yīng)用PMF算法對(duì)在不同深度、速度和航向測(cè)量誤差進(jìn)行仿真研究,得出誤差大小與匹配性能之間的關(guān)系,可以為測(cè)深聲吶和慣性系統(tǒng)設(shè)備的選擇提供一定的理論依據(jù)。
仿真研究使用了兩塊真實(shí)的地形圖,分別如圖2和圖3所示。圖2所示地形的標(biāo)準(zhǔn)差σT=915.195 4 m,由地形粗糙度分類可以得知該地形屬于非常粗糙類型。圖3所示地形的標(biāo)準(zhǔn)差σT=15.028 3 m,該地形屬于平坦地形。兩塊地圖的分辨率都為20 m。
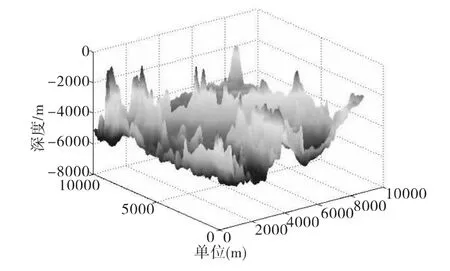
圖2 大起伏地形
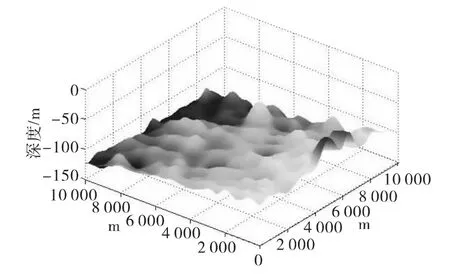
圖3 平坦地形
2.1 深度測(cè)量誤差的影響
為了研究確定深度測(cè)量誤差大小對(duì)匹配性能的影響,將其它參數(shù)進(jìn)行固定:潛航器速度定為5 m/s,航向?yàn)檠豖軸正方向,航行時(shí)間1 200 s,算法搜索區(qū)域的大小為410 m×410 m,分辨率為10 m,初始誤差在X軸和Y軸方向各為200m和180m。將其深度測(cè)量誤差分別設(shè)為1 m、2 m、3 m、4 m、10 m 和40 m,在兩塊不同地形上進(jìn)行多次仿真,來確定深度測(cè)量誤差與匹配性能的關(guān)系。表1為經(jīng)PMF算法仿真后的結(jié)果。
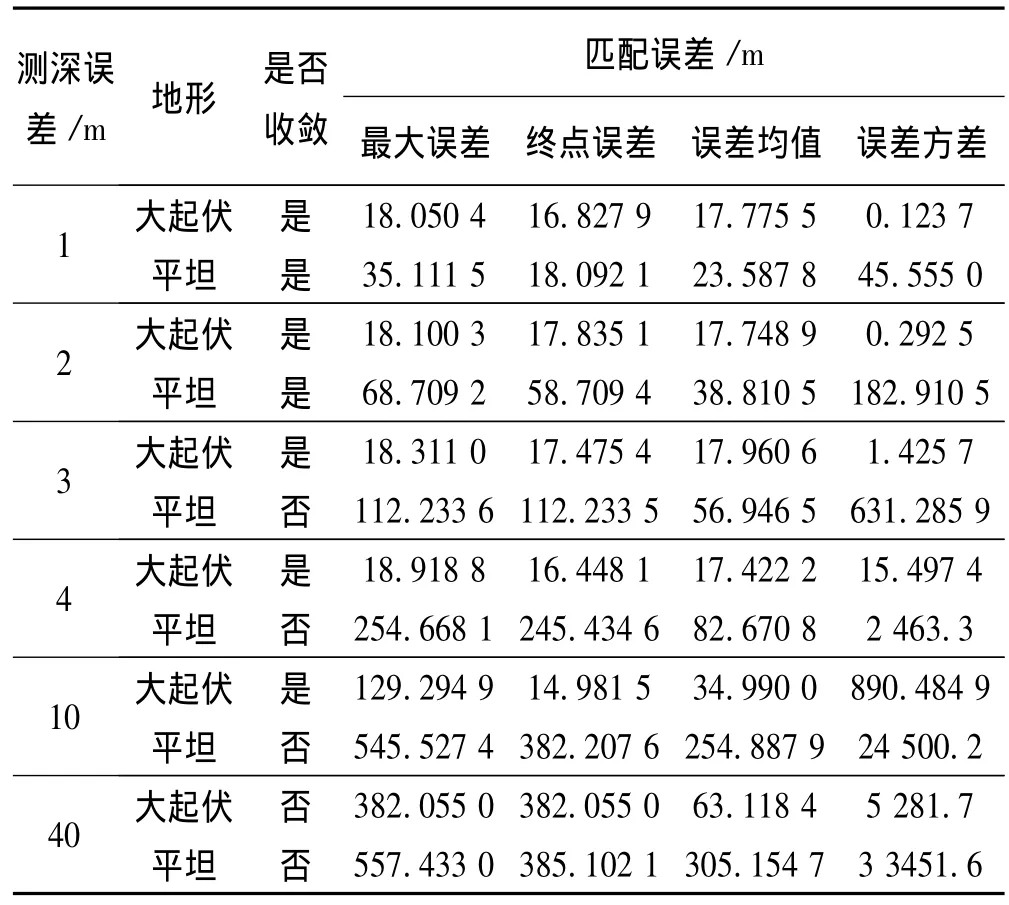
表1 深度測(cè)量誤差導(dǎo)致的匹配誤差
從表1可知,無論是大起伏地形還是平坦地形,在深度測(cè)量誤差逐漸增大時(shí),PMF算法的匹配誤差均值隨之相應(yīng)增加,誤差方差也增加。在深度測(cè)量誤差從1 m增加到4 m過程中,在大起伏地形中其誤差均值和最大值變化很小,而在平坦地形中,其誤差均值、最大誤差、誤差方差和終點(diǎn)誤差迅速增大,并且在深度測(cè)量誤差為3 m時(shí),算法就開始發(fā)散,但在大起伏地形中,深度測(cè)量誤差為40 m時(shí)才開始發(fā)散。充分說明了算法在平坦地形中對(duì)深度測(cè)量誤差更敏感,相反在大起伏地形時(shí)其抗深度測(cè)量誤差能力更強(qiáng)。圖4和圖5分別給出了深度測(cè)量誤差為4 m時(shí)在大起伏地形和平坦地形中的匹配誤差。
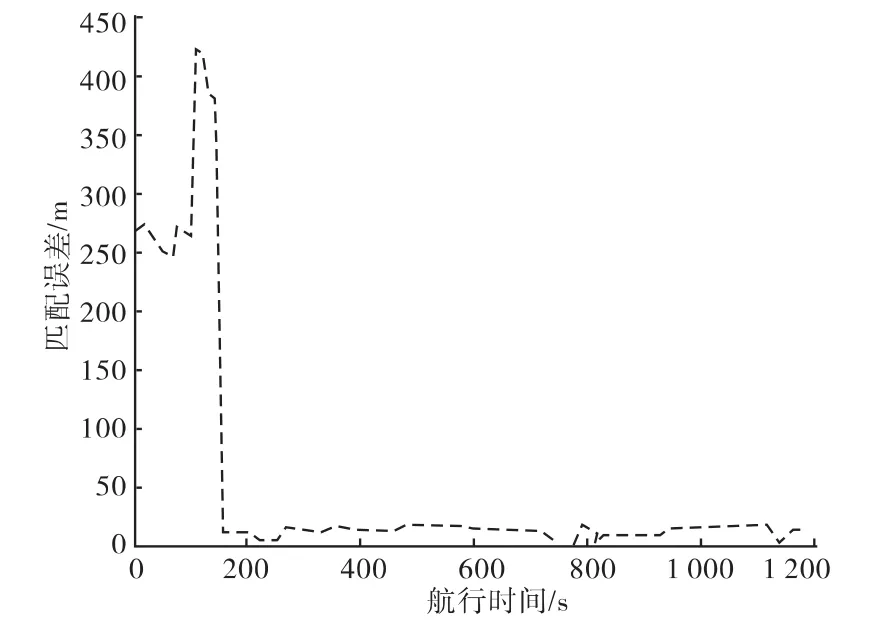
圖4 在大起伏地形的匹配誤差
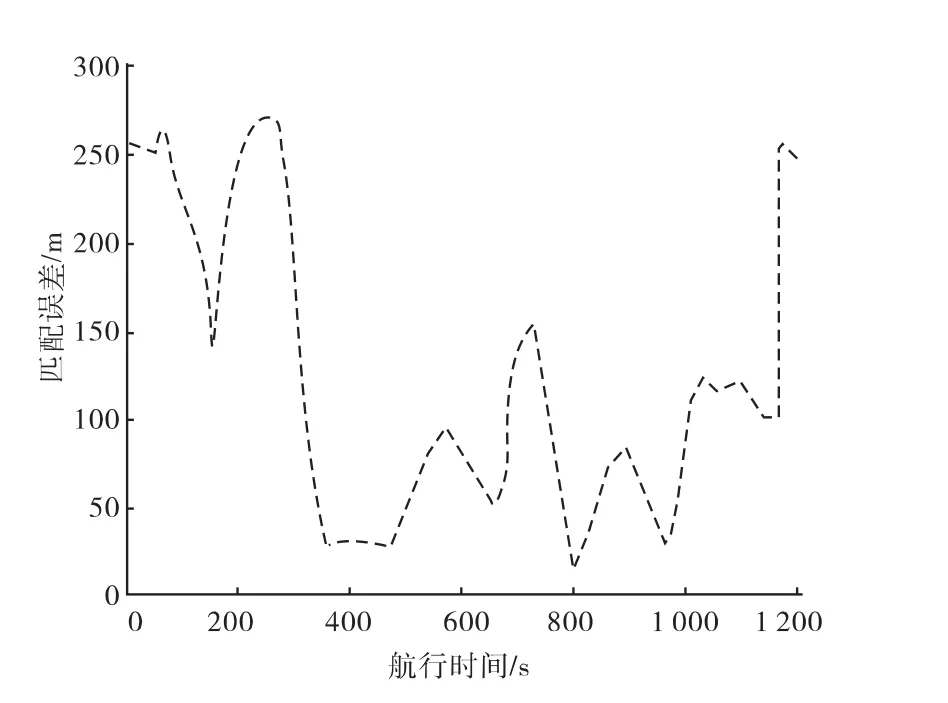
圖5 在平坦地形的匹配誤差
2.2 速度測(cè)量誤差的影響
為了研究確定速度誤差大小與匹配性能的關(guān)系將其它參數(shù)按與上節(jié)相同的方法進(jìn)行固定,速度測(cè)量誤差分別設(shè)為 0.05 m/s、0.1 m/s、0.2 m/s、0.4 m/s和0.6 m/s,然后在兩塊地形上進(jìn)行多次仿真。表2為在不同速度誤差下,經(jīng)PMF算法仿真后的結(jié)果。圖6和圖7分別給出了在大起伏地形中速度誤差為0.2 m/s和0.4 m/s時(shí)的匹配誤差。

表2 速度誤差導(dǎo)致的匹配誤差
由表2、圖6和圖7可以看出,隨著速度誤差的增加,最終匹配結(jié)果包括最大誤差、終點(diǎn)誤差、誤差均值也隨之增加。但當(dāng)速度誤差增加到0.4 m/s時(shí),無論在大起伏地形還是在平坦地形中,匹配結(jié)果都會(huì)發(fā)散,這主要是因?yàn)樗俣日`差增加到一定程度時(shí),隨著航行時(shí)間的增加,慣導(dǎo)系統(tǒng)指示的位置與潛航器真實(shí)位置的偏差增大,從而導(dǎo)致搜索區(qū)域不能涵蓋真實(shí)位置(例如圖7所示的情況)。在收斂的情況下,隨著速度誤差的增加,算法對(duì)平坦地形的匹配效果更差。
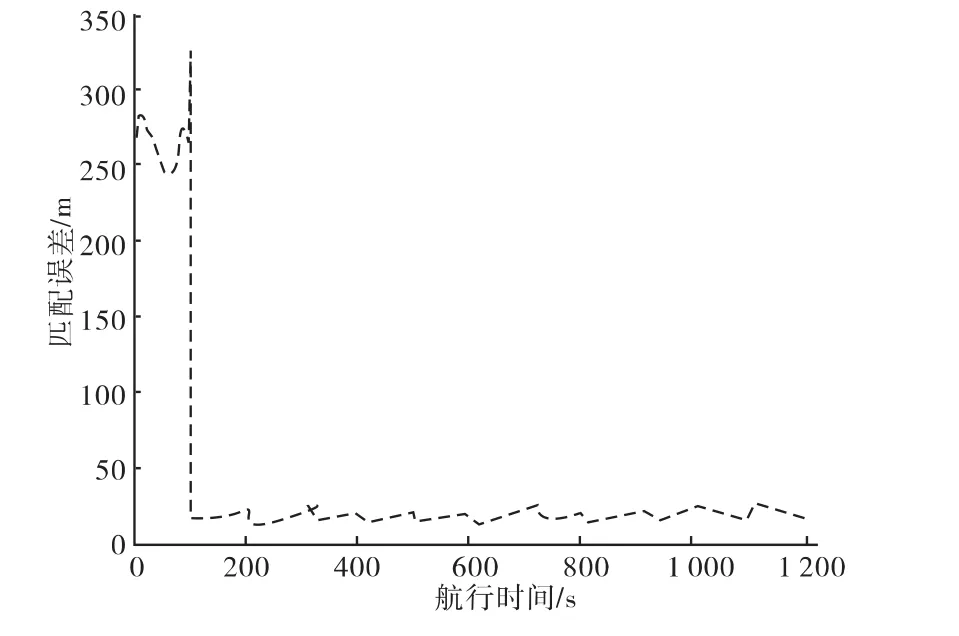
圖6 速度誤差為0.2 m/s時(shí)的匹配結(jié)果
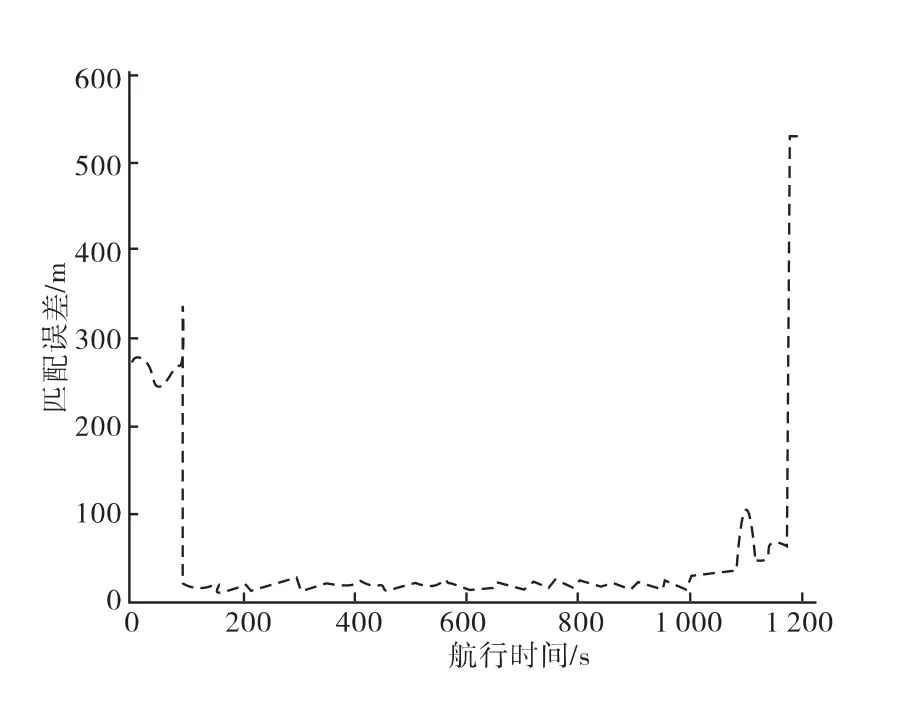
圖7 速度誤差為0.4 m/s時(shí)的匹配結(jié)果
2.3 航向測(cè)量誤差的影響
為了研究確定航向誤差大小與匹配性能的關(guān)系,將模型其它參數(shù)按與上節(jié)相同的方法進(jìn)行固定,航向測(cè)量誤差分別設(shè)為 0.1°、1°、2°、4°和 6°,然后在兩塊不同地形上進(jìn)行多次仿真。表3為不同航向誤差下,經(jīng)PMF算法仿真后的結(jié)果,圖8和圖9分別給出了在大起伏地形中航向誤差為1°和6°時(shí)的匹配誤差。
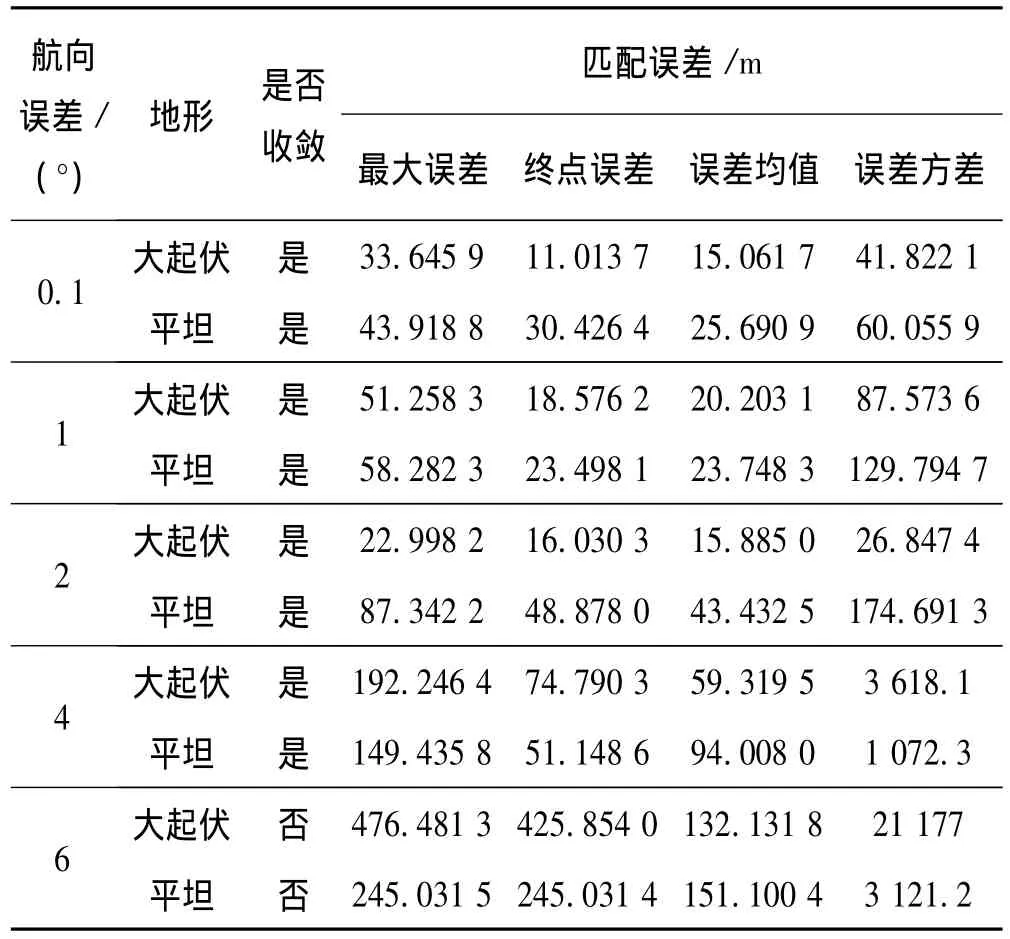
表3 航向誤差導(dǎo)致的匹配誤差
根據(jù)表3、圖8和圖9可知,隨著航向誤差的增加,最終匹配結(jié)果包括最大誤差、終點(diǎn)誤差、誤差均值基本也隨之增加。而當(dāng)航向誤差達(dá)到一定值時(shí),算法在兩塊不同地形中都開始發(fā)散,這主要是因?yàn)楹较蛘`差增加到一定程度時(shí),隨著航行時(shí)間的增加,慣導(dǎo)系統(tǒng)指示航跡與潛航器真實(shí)航跡的間距越來越大,最終到某個(gè)時(shí)刻時(shí)搜索區(qū)域不能涵蓋真實(shí)位置(例如圖9所示的情況)。

圖8 航向誤差為1°時(shí)的匹配誤差
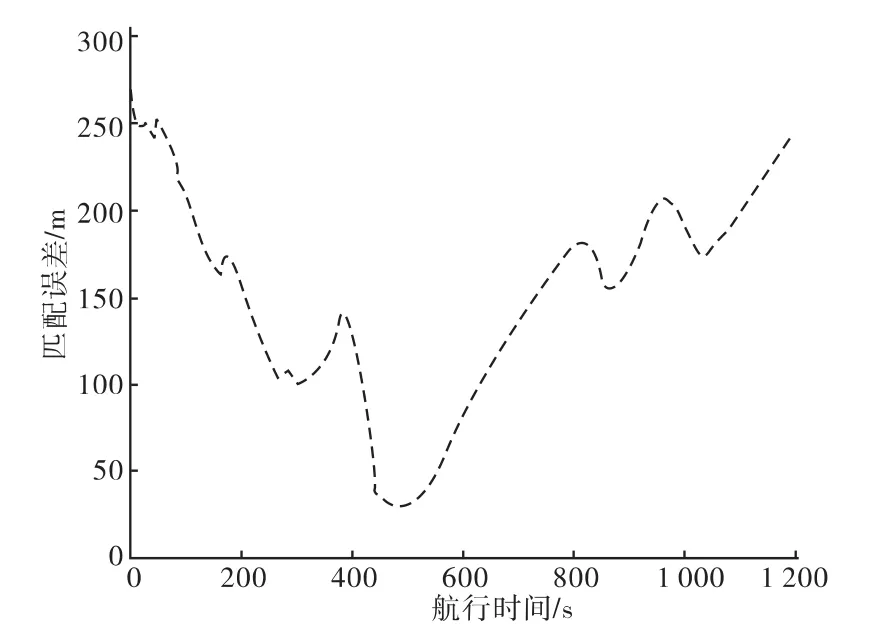
圖9 航向誤差為6°時(shí)的匹配誤差
3 結(jié)論
水下地形匹配輔助導(dǎo)航性能是受包括潛航器測(cè)量誤差在內(nèi)的多種因素影響的,文中主要通過運(yùn)用PMF算法在兩種不同真實(shí)地形圖上進(jìn)行的仿真研究,得出了潛航器的深度、速度以及航向測(cè)量誤差與匹配性能間的關(guān)系。可以知道:在平坦地形中深度誤差對(duì)算法匹配性能的影響最大,但在大起伏地形中可以允許較大的測(cè)深誤差。而當(dāng)速度和航向測(cè)量誤差達(dá)到一定值時(shí),匹配結(jié)果不再收斂。在收斂的情況下,速度和航向測(cè)量誤差在平坦地形對(duì)匹配性能的影響比在大起伏地形中的要大。
[1]辛廷慧.水下地形輔助導(dǎo)航方法研究[D].西安:西北工業(yè)大學(xué),2004.
[2]劉承香.水下潛器的地形匹配輔助定位技術(shù)研究[D].哈爾濱:哈爾濱工程大學(xué),2003.
[3]劉準(zhǔn),侶文芳,陳哲.海底地形匹配技術(shù)研究[J].系統(tǒng)仿真學(xué)報(bào),2004,16(4):700 -702.
[4]李臨.海底地形匹配輔助導(dǎo)航技術(shù)現(xiàn)狀及發(fā)展[J].艦船電子工程,2008,28(2):17 -19.
[5]馮慶堂.地形匹配新方法及其環(huán)境適應(yīng)性研究[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),2004.
[6]K Anonsen,O Hallingstad.Terrain aided underwater navigation using point mass and particle filters[C]//IEEE/ION.Position,Location,and Navigation Symposium,2006.
[7]楊久東,馬飛虎,孫翠羽,等.聲納測(cè)深數(shù)據(jù)濾波及實(shí)踐[J].測(cè)繪信息與工程,2010,35(1):49 -50.
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:50
快樂學(xué)習(xí)報(bào)·教育周刊(2022年16期)2022-05-01 21:25:05
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設(shè)與管理(2015年15期)2015-03-20 15:18:57
