陸地鉆機(jī)鉆桿自動(dòng)起升系統(tǒng)的設(shè)計(jì)與優(yōu)化
2014-09-19 03:10:14中國石油大學(xué)勝利學(xué)院機(jī)械與電氣工程系山東東營257000勝利油田疾病預(yù)防控制中心山東東營257000
重型機(jī)械 2014年5期
(1.中國石油大學(xué)勝利學(xué)院機(jī)械與電氣工程系,山東東營 257000; 2.勝利油田疾病預(yù)防控制中心,山東東營 257000)
(1.中國石油大學(xué)勝利學(xué)院機(jī)械與電氣工程系,山東東營 257000; 2.勝利油田疾病預(yù)防控制中心,山東東營 257000)
由于國內(nèi)陸地鉆機(jī)利用鉆臺(tái)氣動(dòng)絞車或吊車實(shí)現(xiàn)鉆桿上下鉆臺(tái)時(shí)不穩(wěn)定、效率低,本文設(shè)計(jì)了一套用于陸地鉆機(jī)的鉆桿自動(dòng)起升系統(tǒng),該系統(tǒng)可以實(shí)現(xiàn)鉆桿在井場排放架和鉆臺(tái)之間自動(dòng)傳送,極大地縮短了鉆井周期,提高了鉆井效率。并利用ANSYS有限元軟件對該系統(tǒng)的關(guān)鍵部件進(jìn)行了有限元分析和結(jié)構(gòu)優(yōu)化,優(yōu)化后的系統(tǒng)具有足夠的強(qiáng)度、剛度和穩(wěn)定性,滿足長期使用的需要。
陸地鉆機(jī);鉆桿起升;自動(dòng)傳送;有限元分析;結(jié)構(gòu)優(yōu)化
0 前言
目前國外在鉆桿自動(dòng)起升系統(tǒng)方面技術(shù)比較先進(jìn)的公司是挪威Aker Kvaerner MH公司。該公司的管子傳送系統(tǒng)和處理裝置主要有龍門起重機(jī)、折臂起重機(jī)、管子輸送機(jī)、橋式起重系統(tǒng)和鉆臺(tái)操縱臂等裝置。其主要缺點(diǎn)是系統(tǒng)結(jié)構(gòu)龐大,占用較多的井場空間。國內(nèi)的鉆桿自送提升技術(shù)尚處于研究階段,目前采用的鉆桿起升方式主要有兩種,一是利用鉆臺(tái)氣動(dòng)絞車,二是利用吊車。氣動(dòng)絞車輸送管柱時(shí)作業(yè)穩(wěn)定性低、設(shè)備及人身風(fēng)險(xiǎn)大、效率不高,而利用吊車輸送管柱占用場地大、費(fèi)用高、穩(wěn)定性亦差。
1 鉆桿自動(dòng)起升系統(tǒng)結(jié)構(gòu)
鉆桿自動(dòng)起升系統(tǒng)主要由旋轉(zhuǎn)臂總成和豎直桁架組成,其結(jié)構(gòu)如圖1所示。
其中旋轉(zhuǎn)臂總成是鉆桿自動(dòng)起升系統(tǒng)的末端執(zhí)行器,是實(shí)現(xiàn)鉆桿上下鉆臺(tái)和鉆桿由水平位置到垂直位置轉(zhuǎn)換的核心部件。如圖2所示,旋轉(zhuǎn)臂總成由旋轉(zhuǎn)臂和起升架組成。旋轉(zhuǎn)臂由鉆桿夾具手(圖3)、旋轉(zhuǎn)手臂、L型臂等零部件組成;起升架由起升架本體、導(dǎo)向機(jī)構(gòu)和液壓缸等零部件組成。旋轉(zhuǎn)臂的前部有兩個(gè)鉸支點(diǎn),上部的鉸支點(diǎn)與液壓缸活塞鉸接,下部的鉸支點(diǎn)與起升架的鉸支點(diǎn)鉸接。旋轉(zhuǎn)臂在液壓缸的作用下沿著鉸接點(diǎn)旋轉(zhuǎn),旋轉(zhuǎn)角度范圍是0°~90°;同時(shí)在起升架的提升下沿著豎直桁架上下移動(dòng),實(shí)現(xiàn)鉆桿的上下鉆臺(tái)的輸送工作。

圖1 鉆桿自動(dòng)起升系統(tǒng)結(jié)構(gòu)圖Fig.1Structure of drill rod automatic lifting system

在鉆井過程中,旋轉(zhuǎn)臂向鉆臺(tái)輸送鉆桿時(shí),液壓缸活塞推動(dòng)旋轉(zhuǎn)臂,旋轉(zhuǎn)臂繞著旋轉(zhuǎn)臂和起升架之間的連接支點(diǎn)旋轉(zhuǎn),讓鉆桿由水平位置旋轉(zhuǎn)到垂直位置。在鉆井結(jié)束后,旋轉(zhuǎn)臂液壓缸活塞收縮,旋轉(zhuǎn)臂夾具手夾住鉆桿使其從垂直位置轉(zhuǎn)換為水平狀態(tài)。其工作示意圖如圖4所示。

圖4 旋轉(zhuǎn)臂工作過程圖Fig.4Working process of rotating arm
起升架主要包括起升架本體、導(dǎo)輪總成、液壓缸等結(jié)構(gòu)組成(圖5)。起升架的上部旋繩扣連接液壓絞車驅(qū)動(dòng)的鋼絲繩。在起升架的上部和下部以及八個(gè)頂點(diǎn)處分別設(shè)計(jì)了滾輪組和導(dǎo)輪組(圖6)。滾輪組和豎直支架的內(nèi)壁相切,導(dǎo)輪組和豎直桁架的前壁相切,當(dāng)起升架在液壓絞車的驅(qū)動(dòng)下提升時(shí),導(dǎo)輪總成沿著豎直桁架的內(nèi)壁和前壁滾動(dòng)上升。滾輪組在豎直桁架的內(nèi)壁滾動(dòng),除起到導(dǎo)向的作用之外,約束了起升架提升過程中左右方向上的自由度;導(dǎo)輪組在豎直桁架的前壁上滾動(dòng),約束了起升架在提升時(shí)前后方向的自由度,因此導(dǎo)輪總成是起升架的核心組成部件。旋繩扣組、液壓缸安裝支座和旋轉(zhuǎn)臂的安裝支座均焊接在起升架本體上。起升架的安裝如圖7所示。

圖5 起升架裝配體結(jié)構(gòu)圖Fig.5Structure of lifting mechanism assembly

2 工作原理
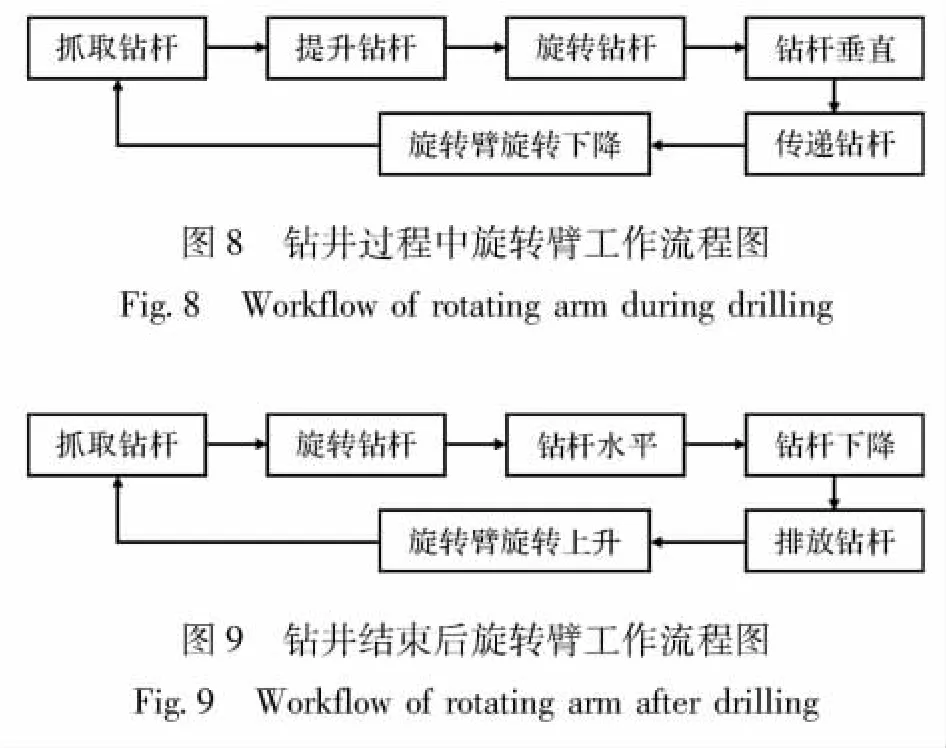
在鉆井作業(yè)中,鉆桿自動(dòng)起升系統(tǒng)是將鉆桿從井場排放架自動(dòng)傳送至鉆臺(tái),在鉆井結(jié)束后,將鉆桿排放到井場排放架的自動(dòng)化操作。該系統(tǒng)代替了傳統(tǒng)用鋼絲繩提調(diào)和甩下鉆桿的高危險(xiǎn)操作,通過遠(yuǎn)程控制區(qū)的監(jiān)控系統(tǒng),可實(shí)時(shí)顯示和記錄作業(yè)工序、設(shè)備的狀況以及對鉆桿的定位和系統(tǒng)化管理。鉆桿自動(dòng)起升系統(tǒng)的旋轉(zhuǎn)臂工作流程如圖8和圖9所示。鉆桿自動(dòng)起升系統(tǒng)旋轉(zhuǎn)臂上的夾具手抓取鉆桿,然后在液壓絞車的驅(qū)動(dòng)下提升,當(dāng)提升至目標(biāo)高度,液壓缸驅(qū)動(dòng)旋轉(zhuǎn)臂繞鉸接點(diǎn)旋轉(zhuǎn),最終將鉆桿旋轉(zhuǎn)至垂直位置,將鉆桿傳送給下一級系統(tǒng)后旋轉(zhuǎn)臂驅(qū)動(dòng)液壓缸驅(qū)動(dòng)旋轉(zhuǎn)臂旋轉(zhuǎn)歸位,鉆井工人控制液壓絞車放下旋轉(zhuǎn)臂繼續(xù)抓取下一根鉆桿,如此重復(fù)進(jìn)行。在鉆井結(jié)束后,旋轉(zhuǎn)臂夾具手夾住鉆桿后旋轉(zhuǎn)臂開始旋轉(zhuǎn),將鉆桿由垂直位置旋轉(zhuǎn)為水平,然后旋轉(zhuǎn)臂下降,最終將鉆桿放在鉆桿輸送系統(tǒng)的輸送機(jī)上,輸送機(jī)進(jìn)行后續(xù)的鉆桿排放工作;然后旋轉(zhuǎn)臂旋轉(zhuǎn)上升繼續(xù)抓取鉆桿,拆卸鉆桿,如此重復(fù)進(jìn)行。
3 有限元分析
3.1 靜力學(xué)計(jì)算
3.1.1 旋轉(zhuǎn)臂總成的受力分析
鉆桿水平時(shí)旋轉(zhuǎn)臂總成的受力情況如圖10所示。G1為旋轉(zhuǎn)臂裝配體的重量,G1=4 421.8 N;G2為副旋轉(zhuǎn)臂、連接臂、拉桿、夾具手安裝支座和夾具手重量之和,G2=1 680.6 N;G3為包括起升架總裝配體、液壓缸、銷軸等,G3=5 184.2 N;G4為單根鉆桿的重量,G4=3 400 N; F0為提升力;F1為左下側(cè)導(dǎo)向輪與桁架之間的法向作用力;f1為左下側(cè)導(dǎo)向輪與桁架之間的摩擦力,f1=λF1,λ=0.15;F2為右上側(cè)導(dǎo)向輪與桁架之間的法向作用力;f2為右上側(cè)導(dǎo)向輪與桁架之間的摩擦力,F(xiàn)2=λF2。
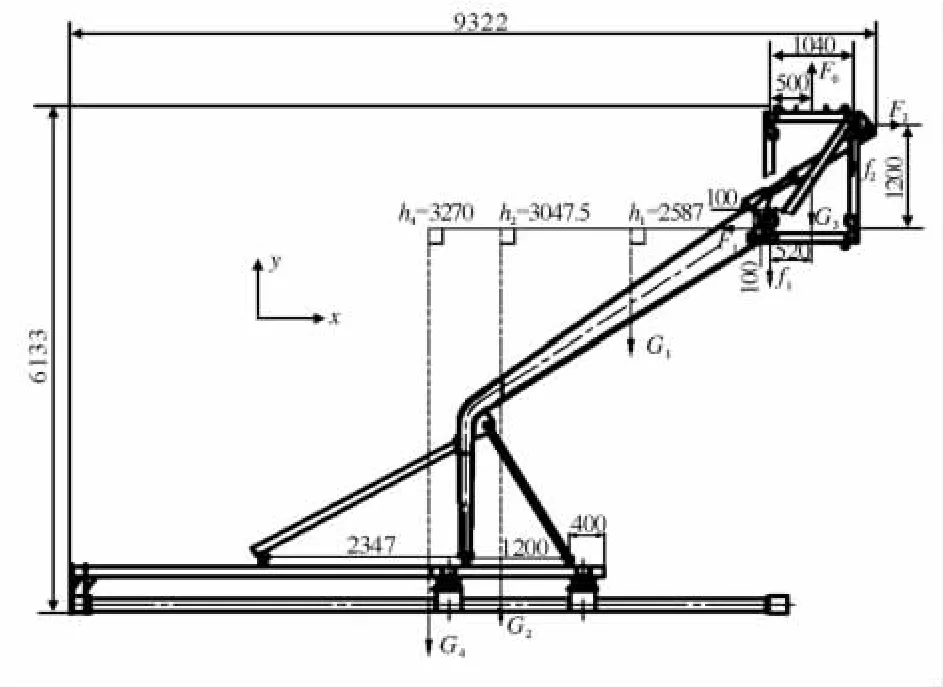
圖10 旋轉(zhuǎn)臂總成受力分析Fig.10Force analysis of rotating system
當(dāng)鉆桿位于水平位置時(shí),旋轉(zhuǎn)臂裝配體的中心位于鉸接點(diǎn)的左端,因此整個(gè)旋轉(zhuǎn)臂裝配體有逆時(shí)針方向的轉(zhuǎn)動(dòng)趨勢,這些力最終通過滾輪系統(tǒng)作用在豎直桁架上。因此當(dāng)鉆桿水平時(shí),滾輪組中左下方滾輪、右上方滾輪和豎直桁架之間的作用力較左上方、右下方的滾輪和豎直桁架之間的作用力大,故取左下方和右上方滾輪和豎直桁架之間的作用力進(jìn)行受力計(jì)算。把鉆桿、旋轉(zhuǎn)臂、起升架看作一個(gè)整體進(jìn)行力學(xué)分析。以O(shè)點(diǎn)為旋轉(zhuǎn)中心,由力的平衡
解方程組得F0=18 738 N;F1=F2=36 819.5 N。
3.1.2 旋轉(zhuǎn)臂的受力分析
把鉆桿、旋轉(zhuǎn)臂看作一個(gè)整體進(jìn)行靜力學(xué)分析,初始狀態(tài)受力簡圖如圖11所示。

圖11 旋轉(zhuǎn)臂受力分析Fig.11Force analysis of rotating arm

式中,F(xiàn)液為液壓缸的拉力,F(xiàn)液=44 438.3 N。
因此得鉸鏈的受力為

3.2 結(jié)構(gòu)分析
為了保證鉆桿自動(dòng)起升系統(tǒng)安全可靠工作,對利用ANSYS有限元分析軟件對旋轉(zhuǎn)臂、起升架、豎直桁架等三個(gè)核心零件進(jìn)行結(jié)構(gòu)分析。旋轉(zhuǎn)臂的材料選用16 Mn,材料的屈服極限為240 MPa,安全系數(shù)取1.33,計(jì)算的許用應(yīng)力為180.45 MPa。從圖12和圖13的分析結(jié)果知,在旋轉(zhuǎn)臂和起升架的鉸接部分發(fā)生了應(yīng)力集中,最大應(yīng)力為160 MPa,小于許用應(yīng)力,最大變形位移為2.68 mm,滿足強(qiáng)度要求。

為減輕起升架的重量,起升架采用方鋼管焊接而成,材料選用20號鋼,材料的屈服極限為195 MPa,安全系數(shù)取1.33,可得許用應(yīng)力為145 MPa。從圖14的分析結(jié)果知,在提升扣和起升架與旋轉(zhuǎn)臂鉸接處均出現(xiàn)了應(yīng)力集中,最大應(yīng)力為16.2 MPa,小于許用應(yīng)力,滿足強(qiáng)度要求。
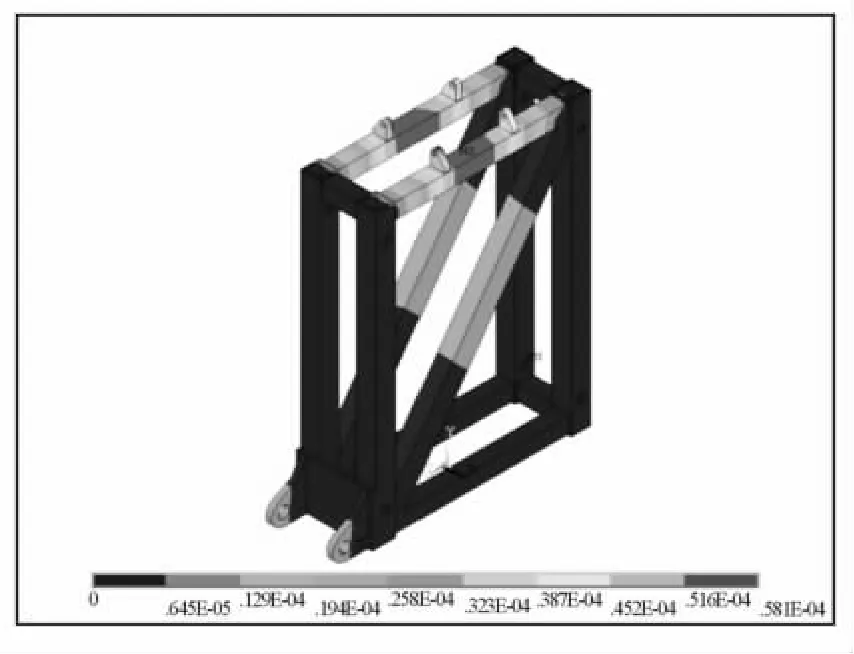
圖15 起升架位移圖Fig.15Displacement nephogram of lifting mechanism
從圖16~圖17分析結(jié)果知,整體結(jié)構(gòu)的最大應(yīng)力發(fā)生在桁架底部的固定端,最大應(yīng)力為40.1 MPa,桁架整體向右傾斜約9.7 mm,按A3最低鋼屈服應(yīng)力235 MPa計(jì),安全系數(shù)取1.5,可得許用應(yīng)力為156.7 MPa,而桁架的最大應(yīng)力為40.1 MPa,安全系數(shù)是3.9,因此整個(gè)結(jié)構(gòu)是安全的。

圖16 豎直桁架應(yīng)力圖Fig.16Stress nephogram of vertical truss
3.3 模態(tài)分析
對旋轉(zhuǎn)臂結(jié)構(gòu)進(jìn)行模態(tài)分析,主要是得到結(jié)構(gòu)的頻率與振型,提取結(jié)構(gòu)前三階固有頻率分別為8.568 Hz、10.822 Hz、27.716 Hz。前三階振型如圖18所示。

根據(jù)以上的計(jì)算結(jié)果,分析旋轉(zhuǎn)臂結(jié)構(gòu)振型圖,整體在第一固有階頻率在X-Y平面內(nèi)發(fā)生擺動(dòng),在第二階固有頻率旋轉(zhuǎn)臂在Y-Z平面內(nèi)發(fā)生擺動(dòng),在第三固有頻率整體旋轉(zhuǎn)臂機(jī)構(gòu)繞Y軸發(fā)生擺動(dòng)。由此可以得出,旋轉(zhuǎn)臂整體機(jī)構(gòu)在低階頻率范圍內(nèi)做平面擺動(dòng),整體變形較小,剛度儲(chǔ)備能量較大,滿足安全使用的要求。
4 結(jié)論
本文設(shè)計(jì)的鉆桿自動(dòng)起升系統(tǒng)是陸地石油鉆機(jī)的配套機(jī)構(gòu),該系統(tǒng)結(jié)構(gòu)可靠,占據(jù)較小的井場空間,對鉆機(jī)井架入口高度要求低;能夠?qū)崿F(xiàn)鉆桿上下鉆臺(tái)的自動(dòng)化操作,不僅降低了鉆井工人的勞動(dòng)強(qiáng)度,保護(hù)了鉆桿本體和絲扣,節(jié)約了鉆井成本,而且極大地縮短了鉆井周期,提高了鉆井效率。
[1]Boyadjieff George I.An overview of top-drive drilling system applications and experiences[C].IADC/ SPE 14716,1996:435-442.
[2]席思文,李偉光,羅瑋韜,等.一種搬運(yùn)機(jī)械手的運(yùn)動(dòng)學(xué)仿真研究[J].機(jī)電工程技術(shù),2009,8 (2):21-24.
[3]楊陽,秦大同,楊濤.塔機(jī)雙吊點(diǎn)水平起重臂結(jié)構(gòu)優(yōu)化設(shè)計(jì)研究[J].工程機(jī)械,2003,34(6): 16-19.
[4]付文范,蘇彥河.液壓吊車起重臂系統(tǒng)設(shè)計(jì)方法研究[J].吉林林學(xué)院學(xué)報(bào),1994,10(3):176 -179.
[5]胡紅軍,楊明波,張丁非.ANSYS 10.0材料工程有限元分析實(shí)例教程[M].北京:電子工業(yè)出版社,2008.
[6]董磊.鉆井平臺(tái)鉆桿自動(dòng)排放控制系統(tǒng)研究[D].山東:中國石油大學(xué)(華東),2009.
[7]余焱群,牛文杰,閆成新,等.石油鉆機(jī)立根自動(dòng)連接系統(tǒng)中鉆桿水平運(yùn)移裝置的設(shè)計(jì)[J].機(jī)械制造業(yè)自動(dòng)化,2011(11):134-135.
[8]尹曉麗,張中慧,牛文杰,等.海洋鉆井平臺(tái)立根自動(dòng)連接系統(tǒng)的設(shè)計(jì)與優(yōu)化[J].石油機(jī)械,2011,(2):27-30.
[9]尹曉麗,牛文杰,張中慧.鉆桿自動(dòng)傳送系統(tǒng)的及設(shè)計(jì)方案[J].石油礦場機(jī)械,2009(7):42 -46.
[10]閆成新,賀慶強(qiáng),尹曉麗.石油鉆桿運(yùn)移裝置起升臂設(shè)計(jì)及優(yōu)化[J].重型機(jī)械,2009(5):55 -57.
陸地鉆機(jī)鉆桿自動(dòng)起升系統(tǒng)的設(shè)計(jì)與優(yōu)化
尹曉麗1,劉衍聰1,趙義明1,朱玉華1,姚梅1,王利生2
Design and optimization on automatic lifting system of land rig rod
YIN Xiao-li1,LIU Yan-cong1,ZHAO Yi-ming1,ZHU Yu-hua1,YAO Mei1,WANG Li-sheng2
(1.Shengli Institute of China University of Petroleum,Dongying 257000,China; 2.Disease Prevention and Control Center of Shengli Oilfield,Dongying 257000,China)
It is the instability and low efficiency that land rig lift drill rod up and down using pneumatic hoist rig or crane.This paper designs a set of automatic lifting system for land drill rod.The system can made drill rod automatic transmission between the drill pipe rack and the derrick floor,greatly shorten the drilling cycle and improve drilling efficiency.Some key parts structure of the system is analyzed and optimized in ANSYS software.So strength of optimized system,stiffness and stability are enough,and meet the requirements for long-term use.
land rig;drill rod lifting;automatic transmission;structure optimization
TH134.21
A
1001-196X(2014)05-0077-06
2014-01-02;
2014-03-20
山東省科技攻關(guān)項(xiàng)目(2009GG1005003)
尹曉麗(1985-),女,碩士,助教,主要從事工程圖學(xué)和石油鉆采機(jī)械方面的教學(xué)和科研工作。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
