基于窄角扇束掃描的固體火箭發(fā)動(dòng)機(jī)CT圖像重建①
2014-09-19 08:14:16陳慶貴劉趙云盧洪義
固體火箭技術(shù) 2014年6期
關(guān)鍵詞:發(fā)動(dòng)機(jī)
陳慶貴,劉趙云,盧洪義,李 朋,李 慎
(1.海軍航空工程學(xué)院,煙臺(tái) 264001;2.海軍駐航天三院軍事代表室,北京 100074;3.91206部隊(duì),青島 266108)
基于窄角扇束掃描的固體火箭發(fā)動(dòng)機(jī)CT圖像重建①
陳慶貴1,劉趙云2,盧洪義1,李 朋1,李 慎3
(1.海軍航空工程學(xué)院,煙臺(tái) 264001;2.海軍駐航天三院軍事代表室,北京 100074;3.91206部隊(duì),青島 266108)
為實(shí)現(xiàn)窄角扇束掃描方式下的CT圖像重建,結(jié)合窄角扇束掃描方式的特點(diǎn),對(duì)已有的重排算法進(jìn)行了改進(jìn),加入了數(shù)據(jù)對(duì)齊環(huán)節(jié),實(shí)現(xiàn)了窄角扇束掃描投影數(shù)據(jù)的同步性。為驗(yàn)證改進(jìn)的重排算法的有效性,利用窄角扇束工業(yè)CT對(duì)某型固體火箭發(fā)動(dòng)機(jī)進(jìn)行CT檢測(cè),并分別用改進(jìn)前后的重排算法對(duì)獲得的投影數(shù)據(jù)進(jìn)行重建。結(jié)果表明,改進(jìn)后的重排算法重建的圖像能夠很好地反映固體火箭發(fā)動(dòng)機(jī)的內(nèi)部結(jié)構(gòu),對(duì)固體火箭發(fā)動(dòng)機(jī)的無(wú)損探傷和壽命預(yù)估具有重要意義。
窄角扇束投影;固體火箭發(fā)動(dòng)機(jī);重排;數(shù)據(jù)對(duì)齊;濾波反投影
0 引言
窄角扇束工業(yè)CT(ICT)屬于第二代CT,具有結(jié)構(gòu)簡(jiǎn)單、成本低的優(yōu)點(diǎn)。因此,它被應(yīng)用在固體火箭發(fā)動(dòng)機(jī)的無(wú)損檢測(cè)中[1-2]。為了對(duì)被檢測(cè)的固體火箭發(fā)動(dòng)機(jī)進(jìn)行CT成像,需要研究窄角扇束掃描方式下的圖像重建算法。對(duì)于窄角扇束掃描成像,葉海霞等[3]介紹了高能X射線(xiàn)工業(yè)CT窄角扇束掃描方式下的卷積反投影圖像重建算法;瞿中等[4]采用帶有松弛系數(shù)的代數(shù)迭代圖像重建算法,對(duì)窄角扇束工業(yè)CT圖像重建進(jìn)行了計(jì)算機(jī)仿真研究。對(duì)于窄角扇束掃描方式,除了固體火箭發(fā)動(dòng)機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)外,射線(xiàn)源和探測(cè)器還需做平移運(yùn)動(dòng),因而無(wú)法獲得窄角扇束投影直接重建公式。代數(shù)迭代重建算法的缺點(diǎn)是計(jì)算量大,計(jì)算效率低,不能滿(mǎn)足固體火箭發(fā)動(dòng)機(jī)CT檢測(cè)實(shí)時(shí)成像的要求,而濾波(卷積)反投影算法[5-8]重建速度較快、重建圖像質(zhì)量高。
本文在濾波反投影算法的基礎(chǔ)上對(duì)已有的重排算法[9]進(jìn)行改進(jìn),以實(shí)現(xiàn)窄角扇束掃描方式下固體火箭發(fā)動(dòng)機(jī)的CT圖像重建。
1 窄角扇束工業(yè)CT的掃描方式
如圖1所示,窄角扇束工業(yè)CT采用單射線(xiàn)源、多探測(cè)器“平移+旋轉(zhuǎn)”的掃描方式。掃描開(kāi)始時(shí),射線(xiàn)源和探測(cè)器以某一固定步長(zhǎng)從固體火箭發(fā)動(dòng)機(jī)的一側(cè)平移到另一側(cè),完成一次投影數(shù)據(jù)的采集。然后,固體火箭發(fā)動(dòng)機(jī)繞其旋轉(zhuǎn)中心按某一方向(逆時(shí)針或順時(shí)針)旋轉(zhuǎn)某一固定角度,射線(xiàn)源和探測(cè)器回到起始掃描位置,以相同的平移步長(zhǎng)再次對(duì)固體火箭發(fā)動(dòng)機(jī)進(jìn)行掃描,直至獲得所需掃描范圍內(nèi)的全部投影數(shù)據(jù),掃描結(jié)束。
圖1 窄角扇束工業(yè)CT掃描方式示意圖Fig.1 Sketch of narrow fan beam ICT scan
2 窄角扇束投影重排算法
通過(guò)窄角扇束工業(yè)CT的掃描方式可發(fā)現(xiàn),扇束中的每條射線(xiàn)并不是同時(shí)對(duì)固體火箭發(fā)動(dòng)機(jī)進(jìn)行掃描的,而是存在掃描上的先后順序。這就導(dǎo)致了獲得的投影數(shù)據(jù)的不同步性,因而不能直接對(duì)重排后的投影數(shù)據(jù)進(jìn)行重建。為了解決投影數(shù)據(jù)的不同步性問(wèn)題,本文在平行束濾波反投影(FBP)算法的基礎(chǔ)上對(duì)已有的重排算法進(jìn)行改進(jìn),加入了數(shù)據(jù)對(duì)齊環(huán)節(jié)。
假設(shè)窄角扇束共有N條等角射線(xiàn),扇束間總夾角為 γ(見(jiàn)圖2),則每2條射線(xiàn)之間的夾角為

根據(jù)被測(cè)固體火箭發(fā)動(dòng)機(jī)的半徑rm和平移步長(zhǎng)d確定平移步數(shù)L:
式中 D為射線(xiàn)源至發(fā)動(dòng)機(jī)旋轉(zhuǎn)中心的距離。
固體火箭發(fā)動(dòng)機(jī)每旋轉(zhuǎn)1次,射線(xiàn)源和探測(cè)器平移L步,獲得N條射線(xiàn)的投影值。假設(shè)對(duì)固體火箭發(fā)動(dòng)機(jī)進(jìn)行180°范圍的掃描,其每次轉(zhuǎn)過(guò)的角度為Δφ,則固體火箭發(fā)動(dòng)機(jī)轉(zhuǎn)動(dòng)的次數(shù):

當(dāng)完成全部投影數(shù)據(jù)的采集后,用改進(jìn)的重排算法對(duì)獲得的窄角扇束投影數(shù)據(jù)進(jìn)行圖像重建[10-12]。改進(jìn)的重排算法包括讀取數(shù)據(jù)、重排、數(shù)據(jù)對(duì)齊、卷積、射束計(jì)算與內(nèi)插和反投影重建環(huán)節(jié)。
圖2 重排算法計(jì)算用圖Fig.2 Sketch of rebinning algorithm
2.1 讀取數(shù)據(jù)
讀取存儲(chǔ)投影數(shù)據(jù)的DAT文件,將投影數(shù)據(jù)存儲(chǔ)為 p(mΔφ,nΔγ,ld),為了便于書(shū)寫(xiě)和計(jì)算,將其簡(jiǎn)記為 p(m,n,l)。其中,m=1,2,…,M;n=1,2,…,N;l=1,2,…,L。
2.2 重排
對(duì)于窄角扇束工業(yè)CT,重排是由獲得的不等間距平行束投影數(shù)據(jù)插值生成等間距平行束投影數(shù)據(jù)的過(guò)程。由圖2可看出,射線(xiàn)源和探測(cè)器平移獲得的是不等間距平行束投影數(shù)據(jù)。假設(shè)N條扇束射線(xiàn)的編號(hào)從右至左依次為1,2,…,N,則固體火箭發(fā)動(dòng)機(jī)每旋轉(zhuǎn)1次,射線(xiàn)源和探測(cè)器平移L步獲得的投影數(shù)據(jù)pi1,pi2,…,piL組成N組平行束投影數(shù)據(jù)pij(i=1,2…,N;j=1,2,…,L)。固體火箭發(fā)動(dòng)機(jī)旋轉(zhuǎn)M次后,共獲得M×N組不等間距的平行束投影數(shù)據(jù)。取N條扇束射線(xiàn)中間編號(hào)為k的射線(xiàn)為基準(zhǔn)射線(xiàn)進(jìn)行重排。其中
k號(hào)射線(xiàn)對(duì)應(yīng)的平行束投影間的間距與平移步長(zhǎng)d相等,則對(duì)于第i條扇束射線(xiàn),其平行束投影之間的間距 di(i=1,2,…,N)可通過(guò)式(5)計(jì)算:

其中,γi為第i條扇束射線(xiàn)與基準(zhǔn)射線(xiàn)k之間的夾角,其值可通過(guò)式(6)計(jì)算得到:

式中 ||為取絕對(duì)值。
在某一固定旋轉(zhuǎn)角度下,對(duì)于第i條扇束射線(xiàn),設(shè)其按平行束間距di做l*次平移的掃描范圍等于其按平移步長(zhǎng)d做l(l=1,2,…,L)次平移的掃描范圍。則有如下關(guān)系式成立:式中 l0為l*的整數(shù)部分;Δl為其小數(shù)部分。
采用線(xiàn)性?xún)?nèi)插由不等間距的平行束投影數(shù)據(jù)p(m,n,l)獲得等間距的平行束投影數(shù)據(jù) p1(m,n,l),其計(jì)算式如下:
2.3 數(shù)據(jù)對(duì)齊
選取中間k號(hào)射線(xiàn)為基準(zhǔn)射線(xiàn)進(jìn)行數(shù)據(jù)對(duì)齊處理,則基準(zhǔn)射線(xiàn)右邊的射線(xiàn)投影數(shù)據(jù)需要進(jìn)行左移,基準(zhǔn)射線(xiàn)左邊的射線(xiàn)投影數(shù)據(jù)需進(jìn)行右移,由此獲得一致同步的投影數(shù)據(jù)p2(m,n,l)。其值可通過(guò)式(10)計(jì)算得到:
數(shù)據(jù)對(duì)齊后,還需進(jìn)行卷積、射束計(jì)算與內(nèi)插和反投影重建環(huán)節(jié),才能完成投影數(shù)據(jù)的重建,具體內(nèi)容請(qǐng)參考文獻(xiàn)[8]。
3 試驗(yàn)驗(yàn)證
為驗(yàn)證改進(jìn)的重排算法在窄角扇束投影數(shù)據(jù)重建方面的有效性,采用450keV射線(xiàn)源的窄角扇束工業(yè)CT對(duì)某型固體火箭發(fā)動(dòng)機(jī)進(jìn)行CT檢測(cè)。檢測(cè)時(shí),選取0.5、1、2 mm 3種不同的平移步長(zhǎng),用于評(píng)價(jià)不同平移步長(zhǎng)下的圖像重建質(zhì)量。采用改進(jìn)前后的重排算法,對(duì)平移步長(zhǎng)為0.5 mm時(shí)的投影數(shù)據(jù)進(jìn)行重建,結(jié)果如圖3、圖4所示。采用改進(jìn)后的重排算法,對(duì)平移步長(zhǎng)為1 mm和2 mm時(shí)的投影數(shù)據(jù)進(jìn)行重建,重建結(jié)果如圖5所示。
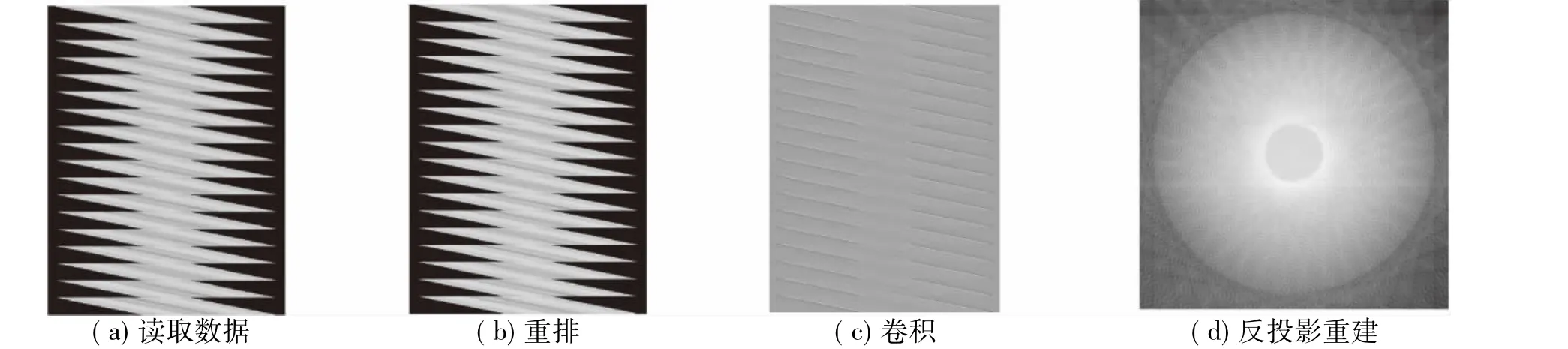
圖3 現(xiàn)有的重排算法重建結(jié)果(d=0.5 mm)Fig.3 Reconstructed results of existing rebinning algorithm(d=0.5 mm)
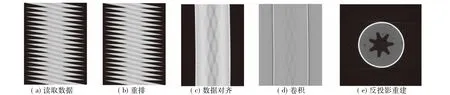
圖4 改進(jìn)后的重排算法重建結(jié)果(d=0.5 mm)Fig.4 Reconstructed results of improved rebinning algorithm(d=0.5 mm)
從圖像重建結(jié)果看,改進(jìn)后的重排算法能夠準(zhǔn)確重建窄角扇束工業(yè)CT掃描投影數(shù)據(jù),且隨著平移步長(zhǎng)的增大,重建圖像質(zhì)量降低,這是由于采集的投影數(shù)據(jù)量減少造成的。
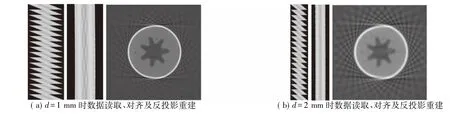
圖5 平移步長(zhǎng)為1 mm和2 mm時(shí)的重建結(jié)果Fig.5 Reconstructed results when translation step lengths are 1 mm and 2 mm
4 結(jié)論
(1)現(xiàn)有的重排算法不能直接用于窄角扇束工業(yè)CT圖像重建,需要對(duì)重排后的投影數(shù)據(jù)進(jìn)行數(shù)據(jù)對(duì)齊處理,才能得到準(zhǔn)確的CT重建結(jié)果。
(2)為了檢測(cè)出固體火箭發(fā)動(dòng)機(jī)內(nèi)部的微小缺陷,對(duì)固體火箭發(fā)動(dòng)機(jī)進(jìn)行窄角扇束工業(yè)CT檢測(cè)時(shí),在兼顧檢測(cè)成本和圖像重建質(zhì)量的情況下,平移步長(zhǎng)盡可能的小。
[1]于光輝,盧洪義,朱敏,等.基于標(biāo)準(zhǔn)固體火箭發(fā)動(dòng)機(jī)CT結(jié)構(gòu)圖像配比的缺陷自動(dòng)提取方法[J].固體火箭技術(shù),2012,35(3):423-426.
[2]盧洪義,楊興根,程衛(wèi)平.小張角扇形射線(xiàn)束CT檢測(cè)固體發(fā)動(dòng)機(jī)局部缺陷[J].推進(jìn)技術(shù),2003,24(3):251-253.
[3]葉海霞,王玨,瞿中.工業(yè)CT窄角扇束卷積反投影圖像重建[J].微機(jī)發(fā)展,2003,13(9):11-12.
[4]瞿中,鄒永貴,沈?qū)挘?工業(yè)CT窄角扇束掃描下的代數(shù)迭代圖像重建算法研究[J].計(jì)算機(jī)研究與發(fā)展,2005,42(11):1882-1888.
[5]高偉雁,孫毅剛.濾波反投影算法在 CT檢測(cè)中的應(yīng)用[C]//計(jì)算機(jī)技術(shù)與應(yīng)用進(jìn)展·2007-全國(guó)第18屆計(jì)算機(jī)技術(shù)與應(yīng)用(CACIS)學(xué)術(shù)會(huì)議論文集.寧波,2007:1143-1146.
[6]馬晨欣,胡君杰,閆鑌.CT扇形束濾波反投影圖像重建算法優(yōu)化[J].激光與光電子學(xué)進(jìn)展,2012,46(9):1-6.
[7]傅健,路宏年.扇束工業(yè)CT濾波反投影重構(gòu)算法的快速實(shí)現(xiàn)[J].計(jì)算機(jī)應(yīng)用研究,2002(3):51-53.
[8]莊天戈.CT原理與算法[M].上海:上海交通大學(xué)出版社,1992:50-56.
[9]Jiang Hsieh.計(jì)算機(jī)斷層成像技術(shù)-原理、設(shè)計(jì)、偽像和進(jìn)展[M].張朝宗,郭志平,等譯.北京:科學(xué)出版社,2006:55-58.
[10]傅健,路宏年,張全紅.扇束工業(yè)CT重建算法速度優(yōu)化[J].CT 理論與應(yīng)用研究,2002,11(3):16-19.
[11]馬建華,顏剛,陳凌劍,等.扇形束CT超短掃描優(yōu)質(zhì)重建算法研究[J].中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào),2008,27(3):347-352.
[12]Guy M Besson.CT image reconstruction from fan-parallel projection data[J].IEEE,1999:1644-1648.
(編輯:呂耀輝)
CT image reconstruction of solid rocket motor based on narrow fan beam scan
CHEN Qing-gui1,LIU Zhao-yun2,LU Hong-yi1,LI Peng1,LI Shen3
(1.Naval Aeronautical and Astronautical University,Yantai 264001,China;2.Military Representatives Office of Navy in the Third Academy of CASIC,Beijing 100074,China;3.Troop 91206,Qingdao 266108,China)
To reconstruct computed tomography(CT)image for narrow fan beam scan,the existing rebinning algorithm was improved considering the characteristic of narrow fan beam scan mode.The process of data shake-up was introduced and synchronicity of narrow fan beam projection data was realized.To test the effectiveness of the improved rebinning algorithm,one solid rocket motor(SRM)was tested by using narrow fan beam industrial CT.Existing and improved rebinning algorithms were used to reconstruct collected projection data.Results show that the improved rebinning algorithm reconstructs the inner structure of SRM well.This is of great significance to nondestructive testing and life prediction of SRM.
narrow fan beam projection;solid rocket motor;rebinning;data shake-up;filtered backprojection
V435
A
1006-2793(2014)06-0877-04
10.7673/j.issn.1006-2793.2014.06.026
2013-09-06;
2014-01-06。
陳慶貴(1987—),男,博士生,研究方向?yàn)榘l(fā)動(dòng)機(jī)測(cè)試?yán)碚撆c技術(shù)。E-mail:cqgccc12345@163.com
猜你喜歡
汽車(chē)維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車(chē)維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車(chē)維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
汽車(chē)維護(hù)與修理(2016年3期)2016-02-28 13:16:54
汽車(chē)維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車(chē)與新動(dòng)力(2014年6期)2014-02-27 12:10:49
汽車(chē)與新動(dòng)力(2014年5期)2014-02-27 12:10:41
汽車(chē)與新動(dòng)力(2014年2期)2014-02-27 12:10:15