吸氣式高超聲速飛行器魯棒反演控制器設計①
2014-09-19 08:13:36卜祥偉吳曉燕陳永興白瑞陽
固體火箭技術 2014年6期
卜祥偉,吳曉燕,陳永興,白瑞陽
(空軍工程大學防空反導學院,西安 710051)
吸氣式高超聲速飛行器魯棒反演控制器設計①
卜祥偉,吳曉燕,陳永興,白瑞陽
(空軍工程大學防空反導學院,西安 710051)
針對吸氣式高超聲速飛行器氣動/推進/結構彈性耦合控制問題,提出了魯棒反演控制器設計方法。采用反演和動態逆方法設計虛擬控制量和實際控制量,通過引入一階低通濾波器來獲取虛擬控制量的導數,解決了虛擬控制量求導復雜問題;為了增強控制器的魯棒性,采用充分光滑投影算子對模型非匹配不確定項進行估計和補償,同時避免了可能出現的參數漂移問題。仿真結果表明,該控制器對模型氣動參數擬合誤差、攻角和升降舵偏角攝動、氣動彈性影響具有魯棒性,對速度指令和高度指令具有很好的跟蹤效果。
吸氣式高超聲速飛行器;魯棒反演控制;一階低通濾波器;充分光滑投影算子
0 引言
吸氣式高超聲速飛行器通常是指以吸氣式發動機為動力,可以在鄰近空間以Mɑ>5的速度飛行的一類飛行器[1],其特殊的機體/發動機一體化設計,細長體氣動外形布局和薄、輕質材料的大量使用,導致空氣動力學、推進系統、結構動力學和氣動熱力學之間存在顯著的交叉耦合效應[2-3]。顯著的彈性效應和復雜的飛行環境使得飛行器動力學模型具有較大的不確定性,這給控制器的設計帶來了極大的挑戰[3]。
目前,國內對吸氣式高超聲速飛行器控制問題的研究大多采用NASA蘭利研究中心開發的Winged-Cone剛體模型[4]。文獻[5]利用魯棒滑模觀測器對模型不確定參數進行估計和補償,設計了一種雙環滑模控制器;文獻[6]設計了一種自適應容錯控制器;文獻[7]針對控制量受限情況,設計了反演控制器。而國外學者更多關心的是彈性效應對飛行控制的影響,大多采用的是Bolender和Doman建立的一體化解析式模型[8],該模型充分考慮了彈性狀態的影響,能夠更加真實地反映出飛行器飛行過程中的氣動/熱/結構/推進耦合現象。文獻[9]考慮彈性效應,設計了一種魯棒自適應控制器,對飛行器彈性振動抑制效果較好;文獻[10]設計了濾波器在線估計彈性振動頻率,采用LQR方法進行跟蹤控制。最近,國內也逐漸開始重視對彈性模型的控制研究[11-12],但抑制飛行過程中的彈性振動存在兩個難題:一是飛行器沒有分配控制權,不存在可設計的控制量;二是飛行器所受廣義彈性力的擬合參數存在不確定性,且彈性狀態不易測量。
本文將解決吸氣式高超聲速飛行器彈性模型的非線性魯棒控制問題。傳統PID控制和最優控制方法對被控對象精確數學模型依賴性較大,控制器魯棒性差。變結構控制方法由于控制的不連續性往往伴隨有較為嚴重的抖振,控制輸出抖振則會進一步激發飛行器彈性狀態和剛體狀態的耦合效應。而反演設計方法則特別適合處理高超聲速飛行器這一類存在非匹配不確定項的系統。本文采用反演和動態逆方法設計控制器,將模型氣動參數擬合誤差、彈性形變引起的機體攻角和升降舵偏角攝動以及彈性狀態對剛體狀態的影響轉化為有上界不確定參數問題,通過引入充分光滑投影算子對不確定參數進行估計和補償,解決了單純動態逆方法魯棒性不強的問題,引入一階低通濾波器來簡化虛擬控制量的求導運算。最后,通過實例仿真對所設計控制器的有效性進行驗證。
1 高超聲速飛行器模型及不確定分析
1.1 縱向運動學方程
吸氣式高超聲速飛行器控制系統的主要任務是通過調節燃料-空氣比φ和升降舵偏角δe,在縱向平面內實現對速度參考指令vref(t)和高度參考指令href(t)的穩定跟蹤。吸氣式高超聲速飛行器縱向運動學方程為

式中 T、D、L和M分別為飛行器所受推力、阻力、升力和俯仰力矩;剛體狀態量分別為速度v、高度h、攻角α、彈道角 γ和俯仰角速度 Q;η為彈性狀態量,η=分別為前三階彈性狀態的阻尼和振動頻率;μ和RE分別為地球引力常數和半徑;m為飛行器質量;Ni(i=1,2,3)為廣義彈性力;Iyy為飛行器轉動慣量。
對模型(1)的氣動力(矩)和推力進行參數擬合[13]:

式中 q=ρv2/2為動壓;ρ為高度h處的空氣密度;S為飛行器參考面積;為飛行器平均氣動弦長;zT為推力力矩耦合系數。
1.2 模型不確定分析
吸氣式高超聲速飛行器獨特的外形結構導致飛行過程中彈性效應顯著。機體彎曲振動會改變前體和升降舵下表面的激波結構而造成機體表面和升降舵局部流動攻角攝動,甚至引起空氣質量溢流,嚴重影響發動機性能。將攝動攻角分別在機體前端和升降舵轉軸處按最大值處理為

推力、阻力、升力和俯仰力矩的擬合參數攝動范圍取為εi,i=T,D,L,M。考慮到彈性狀態不易測量,且沒有相應的執行機構去進行抑制,將彈性狀態對剛體狀態的影響計入模型不確定項,則模型(1)中 v、α、γ、Q子系統因擬合參數攝動引入的誤差為

2 控制器設計
2.1 速度控制器設計



3 實例仿真
為了驗證所設計控制器的有效性,針對吸氣式高超聲速飛行器模型(4)進行閉環系統仿真,模型氣動參數見文獻[13]。彈性狀態阻尼 ζ=0.02(i=1,2,3),彈性振動頻率 ω1=20.2 rad/s,ω2=48.4 rad/s,ω3=95.6 rad/s。飛行器初始速度v=2 331.7 m/s,初始高度h=26 212.8 m。保持飛行動壓q=90 148 Pa不變,速度階躍 Δv=228.9 m/s,高度階躍 Δh=1 219.2 m。高度參考輸入由阻尼為0.95、自然頻率為0.03 rad/s二階參考模型給出,速度參考輸入通過vref(t)={2q exp[(href(t)-h0)/hs]/ρ0}1/2給出,其中 ρ0為高度 h0處的空氣密度。
采用定步長的四階Runge-Kuta法數值求解,步長選為 0.01 s,取 dv=0.8 sin(0.01πt),dγ=dα=0.2 sin(0.01πt),dQ=0.15 sin(0.01πt)。控制器參數取為kv,1=1.1,kv,2=1,kh,1=1.6,kh,2=0.6,kγ,1=1,kγ,2=0.2,kα,1=1.4,kα,2=0.5,kQ,1=1,kQ,2=0.3,c1=c2=1。濾波器參數取為τ1=τ2=τ3=0.05。充分光滑投影算子參數取為 Γv=Γγ=Γα=ΓQ=1,δ=1,σ=0.5,m—=3。
仿真結果如圖1~圖6所示。從仿真結果可以看出,控制器能夠較好地克服模型不確定項的影響,速度跟蹤誤差能夠迅速收斂到零,高度跟蹤誤差也能夠迅速收斂到一個包含零點的很小鄰域內,且大約在80 s內收斂到零,彈道角、攻角和俯仰角速度以及前三階彈性狀態都能趨于平衡狀態,系統控制量Φ和δe始終都能維持在合理的范圍內,且控制輸出無抖振。
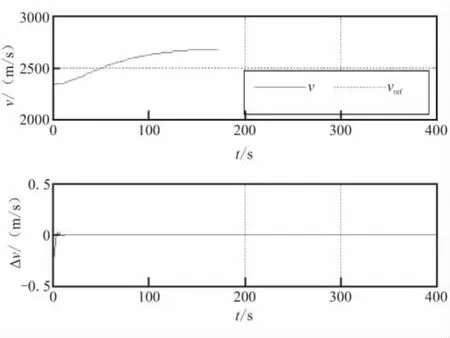
圖1 速度跟蹤曲線和跟蹤誤差Fig.1 Velocity trajectory tracking curve and tracking error
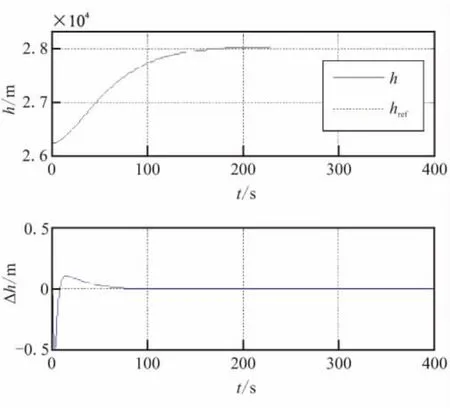
圖2 高度跟蹤曲線和跟蹤誤差Fig.2 Altitude trajectory tracking curve and tracking error
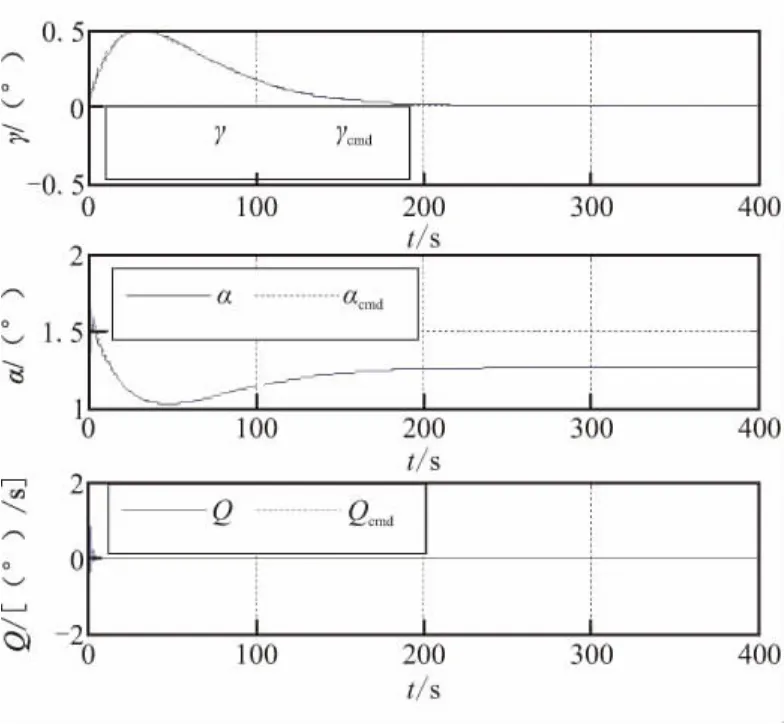
圖3 彈道角、攻角和俯仰角速度響應曲線Fig.3 Angle of attack,angle of elevator and pitch rate response curves
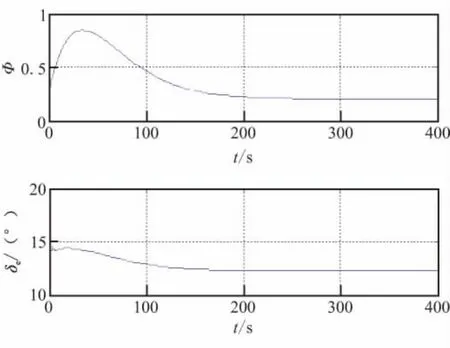
圖4 控制器輸出曲線Fig.4 Controller output curves

圖5 彈性狀態響應及變化率曲線Fig.5 Elastic states response and change rate curves
圖6為充分光滑投影算子對模型不確定項的估計曲線。從圖6可看出,充分光滑投影算子可較精確地估計模型的不確定項,且不存在參數漂移現象,從而顯著增強控制器的魯棒性。

圖6 模型不確定項估計曲線Fig.6 Model uncertainties estimate curves
4 結論
(1)提出了針對吸氣式高超聲速飛行器氣動彈性模型的魯棒反演控制方法。在控制器設計過程中引入一階低通濾波器來獲取虛擬控制量的導數,消除了傳統反演設計中“微分膨脹”問題;通過引入充分光滑投影算子,從而保證了控制器對模型上界已知的不確定項的魯棒性,且放寬了傳統投影算子要已知不確定項上、下界的要求。
(2)仿真結果表明,系統狀態能夠穩定地跟蹤速度和高度參考指令,對飛行器參數擬合誤差、攻角和升降舵偏角攝動以及氣動彈性影響等不確定項具有較強的魯棒性。
[1]Hank J M,Murphy J S,Mutzman R C.The X-51A scramjet engine flight demonstration program[C]//Proceedings of 15th AIAA International Space Planes and Hypersonic System and Technologies Conference.Reston,VA,USA:AIAA,2008:1-13.
[2]Alicia Zinnecker,Andrea Serrani.Combined reference governor and anti-windup design for constrained hypersonic vehicles models[R].AIAA 2009-6283.
[3]Vaddi S S,Sengupta P.Controller design for hypersonic vehicles accommodating nonlinear state and control constraints[R].AIAA 2009-6286.
[4]John D,Shanghnessy S,Zane Pinckey,et al.Hypersonic vehicle simulation model:winged-cone configuration[R].NASA TM 102610,1990.
[5]宋超,趙國策,陳潔.基于魯棒滑模觀測器的高超聲速飛行器雙環滑模控制[J].固體火箭技術,2012,35(4):438-441.
[6]宋超,趙國策,劉旭.高超聲速飛行器的自適應容錯控制[J].固體火箭技術,2012,35(5):593-596.
[7]時建明,王潔,葉繼坤,等.吸氣式高超聲速飛行器輸入受限自適應反演控制[J].固體火箭技術,2012,35(5):573-577.
[8]Michael A Bolender,David B Doman.A non-linear model for the longitudinal dynamics of a hypersonic air-breathing vehicle[R].AIAA 2005-6255.
[9]Lisa Fiorentini,Andrea Serrani,Michael A.Bolender,et al.Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles[J].Journal of Guidance,Control,and Dynamics,2009,32(2):401-416.
[10]Levin J,Ioannou P A,Mirmirani M D.Adaptive model suppression scheme for an aeroelastic air-breathing hypersonic cruise vehicle[R].AIAA 2008-7137.
[11]葛東明.臨近空間高超聲速飛行器魯棒變增益控制[D].哈爾濱:哈爾濱工業大學,2011.
[12]時建明,王潔,王琨,等.吸氣式高超聲速飛行器縱向運動反演控制器設計[J].西安交通大學學報,2013,47(3):102-107.
[13]Lisa Fiorentini.Nonlinear adaptive controller design for airbreathing hypersonic vehicles[D].Columbus:The Ohio State University,2010.
[14]Xuejing Cai.Fault detection/isolation and fault tolerant control for hypersonic vehicle[D].Carolina:North Carolina State University,2010.
[15]Cai Z,M S de Queiroz,D M Dawson.A sufficiently smooth projection operator[J].IEEE Trans.on Automatic Control,2006,51(1):135-139.
(編輯:呂耀輝)
Robust backstepping controller design for air-breathing hypersonic vehicles
BU Xiang-wei,WU Xiao-yan,CHEN Yong-xing,BAI Rui-yang
(Air and Missile Defense College,Air Force Engineering University,Xi’an 710051,China)
A robust backstepping controller was designed for air-breathing hypersonic vehicles with aerodynamics,propulsion and structural flexible dynamics couplings.Virtual and actual control items were designed based on backstepping and dynamic inversion design procedure.To omit analytic calculation of the virtual control item derivatives,which was very difficult to evaluate in the traditional backstepping control,low-pass first order filter was introduced.In order to enhance robustness of the controller,a sufficiently smooth projection operator was employed to estimate and compensate the model unmatched uncertainties,thus avoiding possible parameters drift.Simulation results show that the designed controller is robust to model aerodynamics fitting errors,angle of attack and elevator perturbation and the influence of aeroelasticity,and achieves an excellent tracking performance of velocity and altitude trajectories.
air-breathing hypersonic vehicles;robust backstepping controller;low-pass first order filter;sufficiently smooth projection operator
V448
A
1006-2793(2014)06-0743-06
10.7673/j.issn.1006-2793.2014.06.002
2013-10-18;
2013-11-25。
陜西省自然科學基礎研究計劃資助項目(2012JM8020)。
卜祥偉(1987—),男,博士生,研究方向為飛行器建模與控制。E-mail:buxiangwei1987@126.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03