電流諧波與軋制力諧波協同誘發主傳動多態耦合振動研究
2014-09-18 09:55:30張義方閆曉強凌啟輝
振動與沖擊 2014年21期
關鍵詞:振動
張義方,閆曉強,凌啟輝
(1.北京科技大學 機械工程學院,北京 100083;2.馬鞍山鋼鐵股份有限公司,安徽 馬鞍山 243003)
連軋機振動問題是困擾軋鋼生產的世界難題,隨著對帶鋼表面質量要求越來越高,軋機振動問題成為帶鋼表面質量提升的一大瓶頸。許多專家和學者對軋機振動現象進行了大量的研究。近年來連軋機的振動研究已從過去單一因素研究提高到從耦合振動角度入手來開展研究[1-5]并取得了一些成果,研究發現在軋機系統中存在著各種變量控制參數耦合和多子系統相互耦合等多種耦合行為對軋機振動產生很大影響,因此研究軋機耦合行為對抑制振動具有重要價值。
1 問題提出
某熱連軋F3軋機在軋制薄規格或高強度帶鋼時經常出現振動,利用自制的扭振遙測系統對主傳動扭振進行了測試,扭振測試是將焊接式扭矩傳感器用專用焊機焊在電機輸出軸的表面上,信號由和軸一起旋轉的內線圈與地面固定的靜止外線圈之間的磁場耦合后經調理接入現場監測工控計算機數據采集系統(分辨率為0.5 Hz),力矩電流及軋制力信號由現場工藝采集系統提供(分辨率為0.1 Hz)。現場測試發現軋機主傳動扭振波形及頻譜中主要存在典型的強或弱兩種振動特征現象。例如:一種典型較弱的扭振(如圖1(a)所示)振動中心頻率為41.5 Hz,同時含有18 Hz及49.5 Hz的頻率,同一時刻主傳動電機力矩電流及軋制力主頻為49.6 Hz如圖1(b);另外一種典型較強烈拍振中心頻率也為41.5 Hz如圖2(a),同一時刻電機力矩電流及軋制力主頻都為41.9 Hz如圖2(b)。初步認為:主傳動扭振現象與主傳動兩端的激勵頻率緊密相關,為了說明這一現象,試圖用仿真分析來解釋。
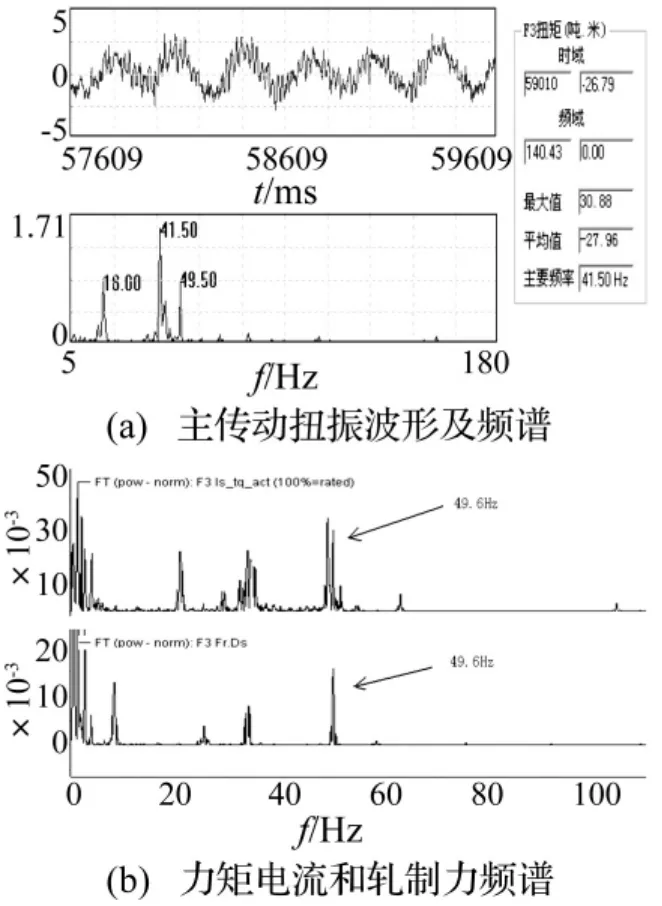
圖1 弱耦合時信號特征Fig.1 Signal characteristic for weak coupling
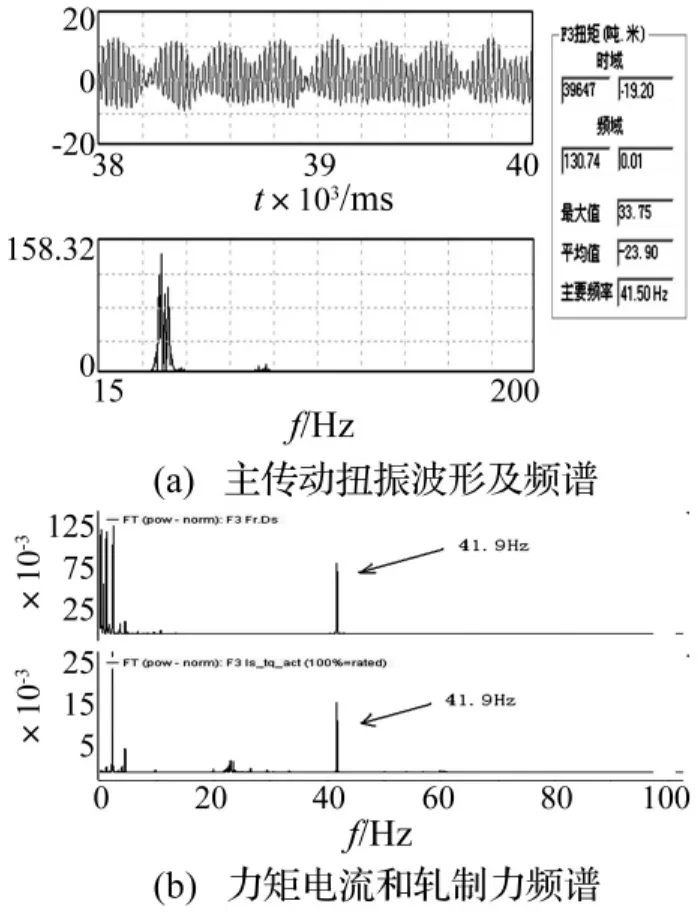
圖2 強耦合時信號特征Fig.2 Signal characteristic for Strong coupling
2 主傳動機械固有頻率計算
為了求解主傳動機械系統固有頻率,依據現場提供的CAD圖紙及有關參數,建立有限元模型如圖3。經過仿真分析獲得主傳動機械系統的固有頻率如表1。從表中可以看出:二階固有頻率與軋機強烈振動頻率接近。
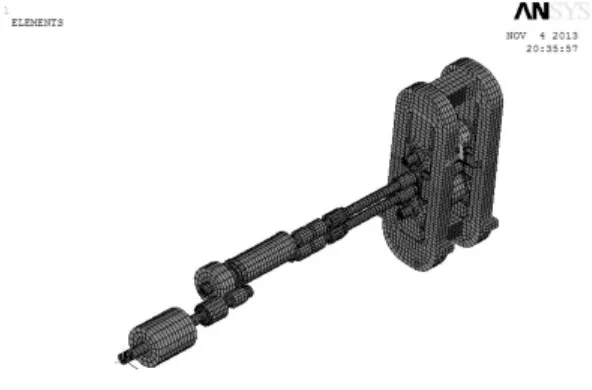
圖3 F3軋機機械系統有限元模型Fig.3 Finite element model of mechanical system for F3 rolling mill

表1 F3軋機主傳動系統扭振固有頻率Tab.1 Natural frequency of torsional vibration for F3 rolling mill main drive system
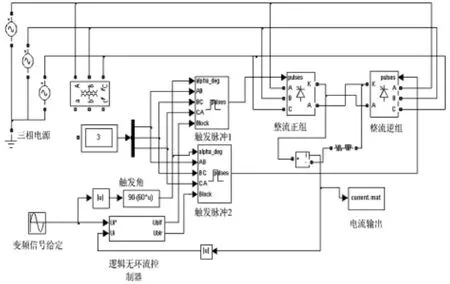
圖4 單相交-交變頻器模型Fig.4 Single phase cycloconverter model
3 電流諧波與主傳動機械系統耦合機制
針對該熱連軋F3軋機的交-交變頻供電系統,利用Matlab/Simulink中SimPowerSystems模塊建立三相交流輸入單相輸出的交-交變頻仿真模型如圖4所示,模型中兩組三相橋整流正組和逆組反并聯連接,兩個觸發模塊觸發脈沖1和觸發脈沖2的同步信號來自同步變壓器。模型中兩組三相橋采用邏輯無環流控制方式,邏輯控制器的輸出信號分別連接觸發器的block端,邏輯控制器根據給定信號和實際反饋電流信號極性確定兩組整流器的工作狀態。給定信號經絕對值變換和移相控制后連接觸發器的alpha-deg端,改變正弦交流給定信號的頻率和幅值,交-交變頻器的輸出電流頻率和幅值作相應的變化。這里根據現場軋制速度選取變頻器輸出頻率為7 Hz進行仿真,輸出電流波形如圖5所示。可見在輸出頻譜中除基頻以外還產生諧波分量。為了分析含這些諧波分量的輸出電流通過同步電機的磁場耦合會產生怎樣的電機輸出力矩。建立了三相交-交變頻器和電動機聯合模型如圖6,電機采用電勵磁凸極同步電動機,三組交-交變頻分別給同步電機的三相供電,根據現場提供的參數仿真輸出的電機定子電流和電磁力矩波形如圖7和圖8。
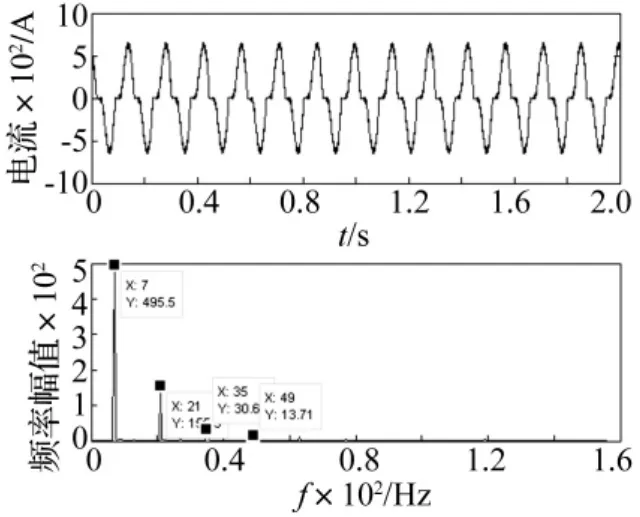
圖5 變頻器輸出電流波形及頻譜Fig.5 Waveform and spectrum of output current for cycloconverter
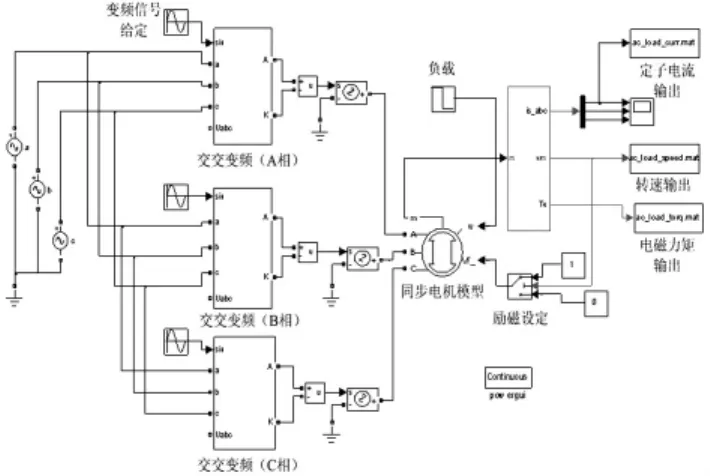
圖6 三相變頻器與電動機聯合模型Fig.6 Model of three phase cycloconverter and motor
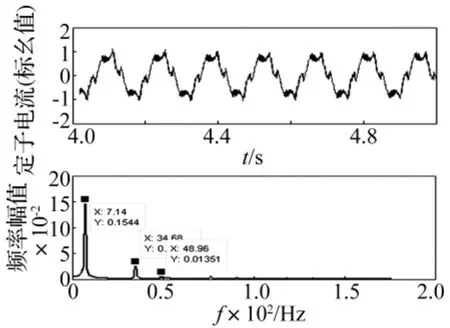
圖7 定子電流波形和頻譜圖Fig.7 Waveform and spectrum of stator current
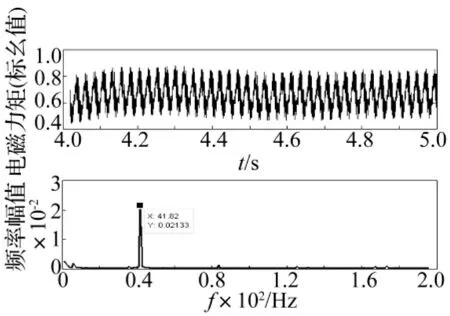
圖8 仿真輸出電機電磁力矩波形及頻譜Fig.8 Waveform and spectrum of electromagnetic torque for simulation
從仿真波形上看:電動機在交交變頻器控制運行時的定子電流除基頻7 Hz外還有35 Hz(5次)和49 Hz(7次)諧波分量,電磁力矩信號中含有42 Hz振蕩頻率。初步確定變頻諧波是產生電動機輸出軸振蕩的主要原因。實際上當諧波電流流過定子線圈繞組時,在繞組內感應出交變的磁勢,三相繞組流過三相交流產生的磁勢就會在電動機磁場空間產生相同頻率的諧波磁勢,5次負序諧波電流在空間產生反向的旋轉磁勢,相對于同步電動機基波磁場的旋轉頻率為-6ω=-5ω-ω,ω為同步電機磁場基波旋轉頻率即同步電機的工作轉頻。7次正序諧波電流在空間產生與基波磁場同向磁勢,其旋轉頻率相對于基波磁場為6ω=7ω-ω,由此可見5次、7次諧波電流在同步電動機中相對于基波磁場的旋轉頻率相同,都為6次,當其和轉子基波磁場作用,就會產生6倍基頻(42 Hz)的電磁轉矩,只是兩者方向相反。這一諧波轉矩疊加在同步電動機基波磁場產生的穩態轉矩之上就造成了電動機輸出轉矩振蕩,圖2中頻率42 Hz恰好為變頻器輸出基頻7 Hz的6倍,因此它是由變頻諧波電流和電動機基波磁場作用產生的諧波力矩頻率。
可見同步電機輸出軸力矩頻率42 Hz為基頻的6倍[6-7]。可以推測如果這一諧波頻率和軋機主傳動機械系統二階固有頻率耦合會誘發強烈振動[8-9]。也就是說諧波力矩越靠近主傳動機械系統固有頻率,耦合振動越強;遠離固有頻率,振動就會減弱。
4 軋制力諧波與主傳動機械系統耦合機制
軋機液壓壓下系統是一個控制模型復雜、軋制力高、擾動參數眾多、控制精度高和響應速度快的系統,它的主要功能是在一定軋制力下來控制帶鋼縱向的厚差。由于壓下電液伺服閥本身的非線性特征,使得系統響應含有諧波分量[10-11]。根據壓下液壓缸及伺服閥等相關參數建立液壓壓下系統模型如圖9,圖中AGC伺服閥采用噴嘴擋板式二級控制電液伺服閥,通過它驅動軋機壓下液壓缸,壓下缸活塞桿和軋機牌坊橫梁固定在一起,液壓缸外殼直接作用在軋機輥系軸承座上,圖中軋機輥系以等效質量、剛度及阻尼代替。改變伺服閥的信號給定,在液壓力的作用下,AGC缸外殼輸出相同頻率的作用力來改變軋機輥縫大小,達到調節帶鋼厚度的目的。假設F3軋機液壓壓下調節頻率為6 Hz,仿真獲得液壓缸作用力(軋制力)波形及頻譜如圖10,從圖中可以看出除6 Hz以外,還含有因系統非線性產生的諧波分量。由軋制理論可知,軋制力的變化會引起主傳動系統扭矩的同頻變化。在軋制過程中,由于液壓壓下的非線性變化產生的諧波分量通過軋制界面耦合到主傳動扭矩中,當傳動系統的扭矩中含有和主傳動機械固有頻率相近的諧波分量,就會誘發軋機傳動系統的耦合振動,遠離系統固有頻率特性,振動就會減弱。
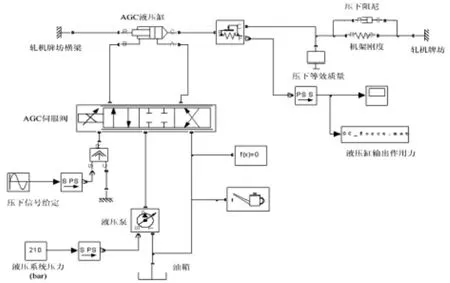
圖9 AGC伺服閥驅動液壓缸仿真模型Fig.9 Model for AGC servo-valve driving hydraulic cylinder
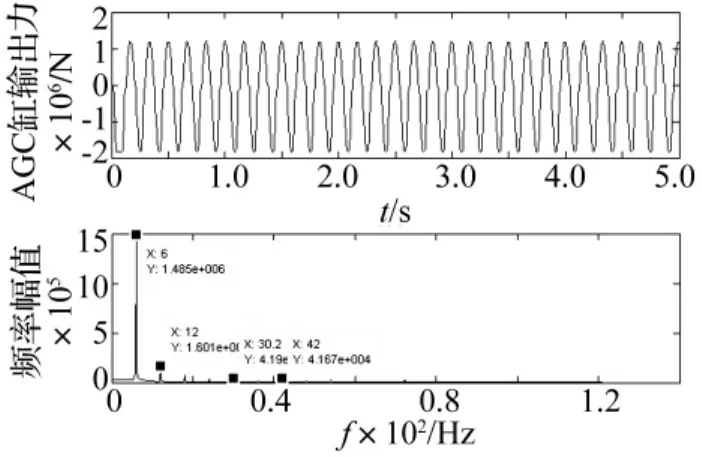
圖10 液壓缸輸出力波形及頻譜Fig.10 Waveform and spectrum of output force for hydraulic cylinder

圖11 傳動系統諧波激勵仿真模型Fig.11 Simulation model of harmonic excitation on main drive system
5 電流諧波和軋制力諧波協同誘發多態耦合振動
為了同時研究電流諧波和軋制力諧波對主傳動扭振的影響,通過Matlab/Simulink中的Simscape相關模塊構建軋機主傳動模型(圖11)。在軋制過程中,隨著軋制速度的變化,主傳動電機電流諧波頻率和軋制力諧波也會發生相應變化,這里分別以49 Hz和42 Hz兩種特定諧波激勵來進行研究。通常情況下,軋機軋制力增加,意味著軋制力矩增加,相應的軋機傳動電機的電流也會增加,由上述的耦合機制可知:電流和軋制力諧波最終通過工作輥耦合在一起。
5.1 諧波遠離固有頻率時的現象
為了模擬現場測試結果,設兩個諧波信號頻率都為49 Hz,將主傳動電機電流諧波力矩和軋制力產生的諧波力矩按照測試的實際值作為兩個激勵源施加在主傳動系統上,仿真結果如圖12所示。
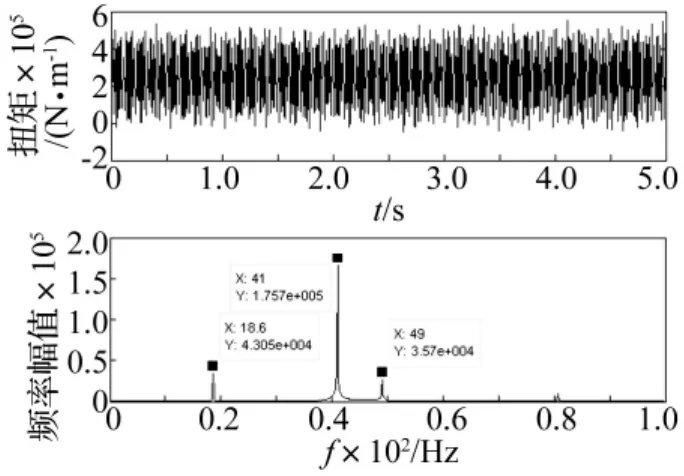
圖12 主傳動軸扭振仿真輸出波形及頻譜Fig.12 Waveform and spectrum of torsional vibration on main drive shaft for simulation
5.2 諧波接近固有頻率振動現象
參考現場測試參數值,設定現場兩個諧波源激勵頻率為42 Hz,同樣將主傳動電機電流諧波力矩和軋制力產生的諧波力矩作為兩個激勵源施加在主傳動系統上,仿真得到主傳動軸扭振響應如圖13所示。
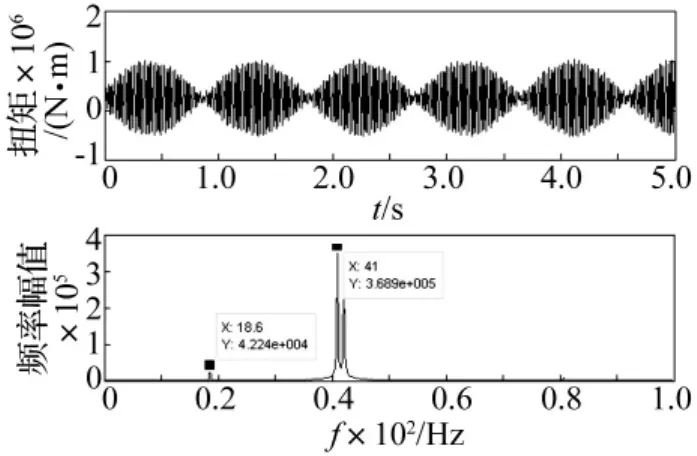
圖13 主傳動軸扭振仿真輸出波形及頻譜Fig.13 Waveform and spectrum of torsional vibration on main drive shaft for simulation
從以上分析可見,當傳動系統兩個諧波激勵頻率遠離主傳動系統固有頻率時,主傳動系統振動較弱,出現了含有一階和二階及激勵頻率共存的多態耦合振動現象。而當諧波激勵頻率和機械系統二階固有頻率相近,主傳動系統將發生強烈拍振,仿真得到的結論與現場實際測試結果相符。
6 結論
軋機主傳動系統同時承受電流諧波產生的電磁力矩諧波和液壓壓下諧波產生的軋制力諧波協同激勵下,主傳動系統呈現多態耦合振動特征。主傳動系統的多態耦合振動特征主要取決于諧波源的激勵頻率。在實際生產中,隨著軋制速度的變化,兩種諧波源的頻率也跟隨發生變化,在不同工況下會呈現強耦合和弱耦合狀態。因此,抑制軋機振動可以從抑制諧波角度來開展工作,將強耦合狀態降低到弱耦合狀態,可以大大降低振動能量和振動現象。
[1]鐘倔,唐華平.高速軋機若干振動問題-復雜機電系統耦合動力學研究[J].振動、測試與診斷,2002,22(1):1 -8.ZHONG Jue,TANG Hua-ping.Vibration problems of high speed rolling mill study of dynamics of complex electromechanically coupled system[J].Journal of Vibration,Measurement& Diagnosis,2002,22(1):1-8.
[2]張瑞成,童朝南.基于交流傳動的軋機機電耦合系統振動特性分析[J].機械強度,2006,28(3):336-340.ZHANG Rui-cheng,TONG Chao-nan.Analysis vibration characteristic of electromechanical coupling system of rolling mill based on ac drive[J].Journal of Mechanical Strength,2006,28(3):336 -340.
[3]馬維金,熊曉燕,李鳳蘭,等.熱連軋機位移傳感器結構的試驗模態分析[J].機械工程學報,2009,45(7):259-264.MA Wei-jin,XIONG Xiao-yan,LI Feng-lan,et al.Modal parameter testing of roller gap sensor structure on hot rolling mill[J].Journal of Mechanical Engineering,2009,45(7):259-264.
[4]劉爽,張業寬,劉彬.軋機主傳動機電耦聯扭振系統的動態分岔研究[J].機械工程學報,2010,46(3):83-89.LIU Shuang,ZHANG Ye-kuan, LIU Bin. Dynamical bifurcation study on electromechanical coupling vibration in rolling mill's drive system[J].Journal of Mechanical Engineering,2010,46(3):83 -89.
[5]閆曉強.熱連軋機機電液耦合振動控制[J].機械工程學報,2011,47(17):61-65.YAN Xiao-qiang.Machinery-electric-hydraulic coupling vibration Control of hot continuous rolling mills[J].Journal of Mechanical Engineering,2011,47(17):61 -65.
[6]李文,趙慧敏,鄧武.變頻器驅動異步電動機振動頻譜特征分析[J].電機與控制學報,2012,16(8):67-73.LI Wen,ZHAO Hui-min,DENG Wu.Analysis of vibration spectrum characteristics for asynchronous motor driven by inverter[J].Electric Machines and Control,2012,16(8):67-73.
[7]Wang Y N,Gu JC,Chen CM.Real-time tracking of the torsional vibration of an induction motor supplied by distorted voltage sources[J].Electric Power Systems Research,2001,57(3):205-215.
[8] Lockley W E,Driscoll T S,Wharran W H,et al.Harmonictorque considerations applying a6000-HPinduction motor and drive to a high-speed compressor[J].IEEE Transactions on Industry Applications,1995,31(6):1412-1418.
[9] Joseph Song-Manguelle,Jean-Maurice Nyobe-Yome,Gabriel Ekemb.Pulsating torques in PWM multi-megawatt drives for torsional analysis of large shafts[J].IEEE Transactions on Industry Applications,2010,46(1):130 -138.
[10]姚建均,胡勝海,韓俊偉.電液伺服振動臺加速度諧波抑制[J].機械工程學報,2010,46(3):22-28.YAO Jian-jun,HU Sheng-hai,HAN Jun-wei.Acceleration harmonic cancellation of electro-hydraulic servo shaking table[J].Journal of Mechanical Engineering,2010,46(3):22-28.
[11]宋瓊,朱長春,牛寶良.液壓振動臺建模與加速度波形失真度分析[J].機床與液壓,2008,36(12):81-83.SONG Qiong,ZHU Chang-chun,NIU Bao-liang.Modeling of the hydraulic shaker and analysis of the aceelaration wave distortion[J].Machine Tool& Hydraulcs,2008,36(12):81 -83.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00