彈道目標(biāo)多傳感器低重合率航跡關(guān)聯(lián)技術(shù)研究
2014-09-08 11:53:18朱冠宇李昌璽
雷達(dá)與對(duì)抗 2014年3期
關(guān)鍵詞:關(guān)聯(lián)方法
朱冠宇,周 焰,郭 戈,徐 穎,李昌璽
(空軍預(yù)警學(xué)院,武漢 430019)
彈道目標(biāo)多傳感器低重合率航跡關(guān)聯(lián)技術(shù)研究
朱冠宇,周 焰,郭 戈,徐 穎,李昌璽
(空軍預(yù)警學(xué)院,武漢 430019)
彈道目標(biāo)伴隨著運(yùn)動(dòng)速度快、區(qū)間跨度廣、測(cè)量誤差大等因素,多傳感器在協(xié)同跟蹤時(shí)相互間因重疊率低產(chǎn)生航跡中斷是一個(gè)比較普遍的現(xiàn)象。這種現(xiàn)象因?qū)桔E關(guān)聯(lián)得到連貫完整的航跡產(chǎn)生影響而成為一個(gè)亟待解決的問(wèn)題。針對(duì)該問(wèn)題,通過(guò)對(duì)現(xiàn)有航跡的延續(xù)和反推,本文提出一種利用目標(biāo)狀態(tài)進(jìn)行航跡關(guān)聯(lián)的方法。實(shí)驗(yàn)證明,該方法可以有效解決彈道目標(biāo)在低重合率條件下的航跡關(guān)聯(lián)問(wèn)題。
彈道目標(biāo);航跡預(yù)測(cè);航跡關(guān)聯(lián);多傳感器
0 引 言
傳統(tǒng)的防空系統(tǒng)中,同一地區(qū)有多部雷達(dá)進(jìn)行監(jiān)視,傳感器之間相互重疊率高,對(duì)于同一目標(biāo)有多部雷達(dá)進(jìn)行跟蹤監(jiān)視,可以獲得不同傳感器對(duì)于同一目標(biāo) 足夠長(zhǎng)度的同一時(shí)間段內(nèi)的航跡。在對(duì)來(lái)襲目標(biāo)進(jìn)行關(guān)聯(lián)判斷時(shí),主要的根據(jù)是這些同一時(shí)間段內(nèi)的航跡之間的距離、相似程度。但是,在彈道導(dǎo)彈預(yù)警體系中,對(duì)彈道目標(biāo)的跟蹤采用分段協(xié)同探測(cè)的模式,各傳感器關(guān)于同一目標(biāo)在同一時(shí)段里航跡重疊的部分較少,甚至有時(shí)會(huì)因波束無(wú)法交接而產(chǎn)生沒(méi)有重疊的情況。這時(shí),傳統(tǒng)的航跡關(guān)聯(lián)方法就失效了。因此,需要專門(mén)尋找一種對(duì)于彈道目標(biāo)的航跡關(guān)聯(lián)的方法。
文獻(xiàn)[4]對(duì)彈道導(dǎo)彈運(yùn)行過(guò)程中的狀態(tài)估計(jì)算法和定軌預(yù)報(bào)方法進(jìn)行了討論分析,并指出了其在遠(yuǎn)程相控陣?yán)走_(dá)與多功能地基相控陣?yán)走_(dá)之間進(jìn)行交接預(yù)報(bào)的作用。文獻(xiàn)[5]討論了在多彈道目標(biāo)發(fā)生航跡中斷之后對(duì)中斷前后的航跡片段進(jìn)行優(yōu)化的關(guān)聯(lián)方法,但基于同一傳感器的數(shù)據(jù)。本文所提供方法與前述相比是一種基于航跡預(yù)測(cè)的航跡關(guān)聯(lián)方法。將目標(biāo)航跡在兩傳感器之間的部分通過(guò)遞推來(lái)延長(zhǎng)公共部分,并在延長(zhǎng)之后利用航跡關(guān)聯(lián)方法進(jìn)行關(guān)聯(lián)判斷。通過(guò)仿真實(shí)驗(yàn)表明,該方法可以有效解決彈道目標(biāo)運(yùn)動(dòng)過(guò)程中的航跡關(guān)聯(lián)問(wèn)題。
1 彈道目標(biāo)航跡關(guān)聯(lián)基本思想
彈道導(dǎo)彈飛行過(guò)程如圖1所示。目標(biāo)經(jīng)過(guò)不同傳感器的掃描范圍時(shí)會(huì)分別產(chǎn)生一段航跡。由于彈道導(dǎo)彈目標(biāo)飛行跨度大等特殊因素,不同傳感器產(chǎn)生的航跡之間可能會(huì)有空白或交接部分較少。大致可以分為圖1中的兩種情況。
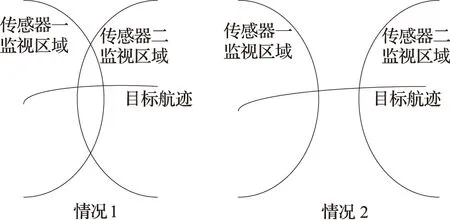
圖1 彈道目標(biāo)軌跡情況
圖1中,情況1表示目標(biāo)航跡通過(guò)傳感器之間的重合區(qū)域,但處在公共部分的航跡較少;情況2表示目標(biāo)航跡在兩部傳感器間通過(guò)時(shí)有部分處在兩部傳感器的公共監(jiān)視范圍之外。
當(dāng)情況1中傳感器之間的公共區(qū)域足夠大,則可以利用傳統(tǒng)的航跡關(guān)聯(lián)方法進(jìn)行關(guān)聯(lián);若情況2中兩部傳感器之間的空隙過(guò)大,則會(huì)影響關(guān)聯(lián)的精度。因此,需要對(duì)具體使用情況進(jìn)行判斷。
傳統(tǒng)的航跡關(guān)聯(lián)方法只需要對(duì)有限個(gè)點(diǎn)進(jìn)行關(guān)聯(lián)處理(例如采用序貫法最少只需要6個(gè)點(diǎn))就可以完成關(guān)聯(lián)判斷。所以,對(duì)于情況1和情況2,采取不同的判斷標(biāo)準(zhǔn)。因?yàn)榍闆r1中已經(jīng)存在一部分公共航跡點(diǎn),這部分公共點(diǎn)可以利用來(lái)直接進(jìn)行關(guān)聯(lián)判斷;而情況2中,目標(biāo)在兩部傳感器之間缺失的點(diǎn)需要通過(guò)航跡遞推來(lái)得到。這樣,針對(duì)情況1,當(dāng)目標(biāo)通過(guò)的公共區(qū)域的點(diǎn)數(shù)小于或等于6個(gè)點(diǎn)時(shí)(因?yàn)樵诤桔E關(guān)聯(lián)算法中最少只需要6個(gè)點(diǎn)就可以判定兩條航跡完全關(guān)聯(lián));針對(duì)情況2,則需要缺失的點(diǎn)數(shù)小于20(缺失點(diǎn)過(guò)多將導(dǎo)致遞推誤差加大,發(fā)生漏關(guān)聯(lián)的概率增大)。
對(duì)情況1,設(shè)n1為公共區(qū)域內(nèi)點(diǎn)的個(gè)數(shù),則判斷標(biāo)準(zhǔn)為:n1≤6。
對(duì)情況2,設(shè)n2為兩傳感器之間缺失的點(diǎn)的個(gè)數(shù),則判斷標(biāo)準(zhǔn)為:n2<20。
n2的確定方法如下:設(shè)t1為前航跡最后一個(gè)點(diǎn)出現(xiàn)的時(shí)刻,t2為后航跡第1個(gè)點(diǎn)出現(xiàn)的時(shí)刻,T為傳感器掃描周期,則
(1)
2 航跡遞推長(zhǎng)度選取
航跡遞推的目的是為了延長(zhǎng)航跡中時(shí)間重合部分的長(zhǎng)度(情況1)或產(chǎn)生時(shí)間重合部分(情況2),并利用時(shí)間重合部分通過(guò)航跡關(guān)聯(lián)方法進(jìn)行關(guān)聯(lián)判斷。為了保證關(guān)聯(lián)正確率和運(yùn)算速度,需要確定航跡遞推的長(zhǎng)度。為方便敘述,可定義:(1)前航跡:即前一傳感器濾波得到的航跡片段;(2)后航跡:后一傳感器濾波得到的航跡片段。情況1與情況2的基本思路都是使得時(shí)間重合部分的航跡點(diǎn)數(shù)達(dá)到20個(gè),這樣可以有充分的時(shí)間重合部分的航跡來(lái)保證關(guān)聯(lián)的質(zhì)量,又可以使得航跡關(guān)聯(lián)部分不至于過(guò)于冗長(zhǎng)而影響運(yùn)行速度。
T1、T2分別為前、后航跡,為了減小系統(tǒng)誤差,其向前、后遞推的點(diǎn)數(shù)應(yīng)相同。T1、T2遞推增加的部分航跡分別記為T(mén)10、T20,遞推的點(diǎn)數(shù)分別記為n10、n20。n1、n2定義如前所述保持不變。前、后航跡每增加一個(gè)遞推點(diǎn)即進(jìn)行一次判定, 當(dāng)判定結(jié)果第一次達(dá)到判斷標(biāo)準(zhǔn)時(shí)即停止遞推。針對(duì)情況1,判斷標(biāo)準(zhǔn)為
n10+n20+n1≥20
(2)
遞推后情況1航跡如圖2所示,虛線部分為遞推航跡。圖示中,n1=4,n10=n20=8。
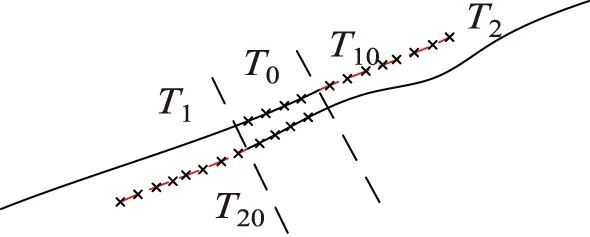
圖2 情況1遞推關(guān)系示意圖
針對(duì)情況2,判斷標(biāo)準(zhǔn)為
n10+n20-n1≥20
(3)
遞推后情況2航跡如圖3所示,虛線部分為遞推航跡。圖示中,n2=4,n10=n20=12。
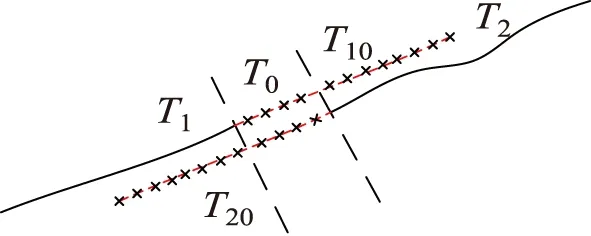
圖3 情況2遞推關(guān)系示意圖
3 航跡遞推
進(jìn)行航跡遞推時(shí),情況1與情況2、前航跡與后航跡所使用的方法和基本原理是一致的。這里以前航跡遞推為例來(lái)進(jìn)行說(shuō)明。
由于考慮到彈道導(dǎo)彈在中段所處時(shí)間較長(zhǎng),傳感器間的跟蹤接力主要是在中段進(jìn)行,所以采用中段時(shí)的狀態(tài)進(jìn)行推測(cè)。
設(shè)彈道導(dǎo)彈目標(biāo)在中段運(yùn)行時(shí)的方程為
X(k+1)=FX(k)+Gu(k)+V(k)
(4)
其中,u(k)為目標(biāo)運(yùn)動(dòng)過(guò)程中所受到的地球加速度,V(k)為受到的其他擾動(dòng)。因?yàn)樵谥卸芜\(yùn)行時(shí)重力加速度是目標(biāo)所受到的主要影響,故可以將目標(biāo)視為僅受重力作用[1],可將此時(shí)運(yùn)動(dòng)方程簡(jiǎn)化為
X(k+1)=FX(k)+Gu(k)
(5)
利用式(5)可以對(duì)目標(biāo)狀態(tài)進(jìn)行推測(cè)。對(duì)于前航跡向后遞推,可以直接使用式(5);對(duì)于后航跡的前向遞推則需要將方向進(jìn)行反向后進(jìn)行,即
X(k)=F-1[X(k+1)-Gu(k)]
(6)
目標(biāo)所處位置不同,受到的引力不同。根據(jù)地球平均半徑R和導(dǎo)彈距地心位置r可得受到加速度的大小為

(7)
4 航跡關(guān)聯(lián)
在這里,采用序貫法對(duì)時(shí)間重合條件下的目標(biāo)航跡(包括遞推得到的航跡)進(jìn)行航跡關(guān)聯(lián)處理。
航跡關(guān)聯(lián)算法主要分為兩大類(lèi),即傳統(tǒng)的基于統(tǒng)計(jì)的算法和基于模糊數(shù)學(xué)的算法。其中序貫法是基于統(tǒng)計(jì)的航跡關(guān)聯(lián)算法的一種。序貫法是把航跡當(dāng)前時(shí)刻的關(guān)聯(lián)與其歷史聯(lián)系起來(lái),并賦予良好的航跡關(guān)聯(lián)質(zhì)量管理和多義性處理技術(shù),能夠應(yīng)對(duì)一定的密集目標(biāo)環(huán)境、交叉、分岔航跡較多的場(chǎng)合。同時(shí),相比于模糊數(shù)學(xué)的方法,其原理簡(jiǎn)單,運(yùn)算速度快,且由于傳感器精度的提高其關(guān)聯(lián)精度已經(jīng)完全能夠滿足需要[2]。
將時(shí)間重合部分航跡重新編號(hào)。假設(shè)該部分共有n個(gè)點(diǎn),則前后航跡該部分的狀態(tài)估計(jì)之差記為

(8)
兩航跡關(guān)聯(lián)實(shí)際上是一種假設(shè)檢驗(yàn)過(guò)程。設(shè)H0和H1是下列事件:
H0:前、后航跡關(guān)聯(lián);
H1:前、后航跡不關(guān)聯(lián)。
序貫法采取的假設(shè)檢驗(yàn)量為

(9)
其中
C12(k|k)=P1(k|k)+P2(k|k)
(10)
其中P1(k|k)與P2(k|k)分別為前、后航跡的狀態(tài)協(xié)方差。由于在航跡外推過(guò)程中兩部雷達(dá)沒(méi)有獲得測(cè)量值,這里在應(yīng)用到外推航跡時(shí)對(duì)P1(k|k)與P2(k|k)計(jì)算利用線性卡爾曼濾波方法進(jìn)行近似:協(xié)方差一步預(yù)測(cè)為
P(k+1|k)=F(k)P(k|k)F′(k)+Q(k)
(11)
信息協(xié)方差為
(12)
這里
R(k+1)由X(k+1)轉(zhuǎn)化出斜距、俯仰、方位信息后近似求得,繼而
K(k+1)=P(k+1|k)H′(k+1)S-1(k+1)
(13)
(14)
λ12(k)是具有knx自由度的χ2分布隨即變量,nx為狀態(tài)向量的維數(shù)。這樣即可對(duì)H0或H1進(jìn)行假設(shè)檢驗(yàn),即如果
λ12(k)≤δ(k)
(15)
則接受H0,否則接受H1。其中閾值滿足
Pr{λ12(k)>δ(k)|H0}=α
(16)
式中,α為檢驗(yàn)的顯著水平,這里一般取0.05。于是,對(duì)于給定的α,δ(k)隨著k的增加而變大,且需實(shí)時(shí)修正。對(duì)于某一nx值,當(dāng)k大于某一值時(shí),δ(k)近似為一遞推式。例如,nx=4,α=0.05,當(dāng)k≥8時(shí):
δ(k)=δ(k-1)+5
(17)
于是,便可以利用其判斷出前、后航跡是否關(guān)聯(lián)。再對(duì)時(shí)間重合部分的航跡進(jìn)行航跡融合,并與前、后航跡一起組成了一條完整、連貫的航跡。
5 仿真實(shí)驗(yàn)
實(shí)驗(yàn)?zāi)M某型射程為5000 km的彈道導(dǎo)彈發(fā)射,導(dǎo)彈發(fā)射點(diǎn)位于147°E, 18°N。
濾波器采用的是無(wú)味卡爾曼濾波器(Unscented Kalman Filter, UKF),主要原因,一是不需要對(duì)非線性狀態(tài)方程和觀測(cè)方程進(jìn)行線性化處理,直接利用非線性狀態(tài)方程來(lái)估算目標(biāo)狀態(tài)向量的概率密度函數(shù),適用于任意非線性模型,狀態(tài)估計(jì)精度較高;二是UKF在使用時(shí)不需要計(jì)算雅克比矩陣,實(shí)現(xiàn)簡(jiǎn)單,時(shí)效性高[3]。
坐標(biāo)系采用地球固連坐標(biāo)系,目標(biāo)的三維坐標(biāo)在該坐標(biāo)系下產(chǎn)生。
5.1 單目標(biāo)跟蹤仿真
兩部雷達(dá)均采用遠(yuǎn)程相控陣?yán)走_(dá),測(cè)距精度為50 m,方位角和俯仰角測(cè)量噪聲標(biāo)準(zhǔn)差為0.2°[4],均服從均值為0的正態(tài)分布。其中,雷達(dá)還存在1×10-3m與1×10-3rad的系統(tǒng)誤差。采樣時(shí)間T=1 s。
導(dǎo)彈在發(fā)射之后共歷時(shí)1538 s后命中目標(biāo)。兩部雷達(dá)在其中的探測(cè)區(qū)間分別是[1100 s,1200 s],[1190 s,1290 s]。
兩部雷達(dá)對(duì)目標(biāo)跟蹤濾波后的圖像見(jiàn)圖4。經(jīng)過(guò)航跡遞推后,得到新航跡與之前航跡結(jié)合,如圖5所示。
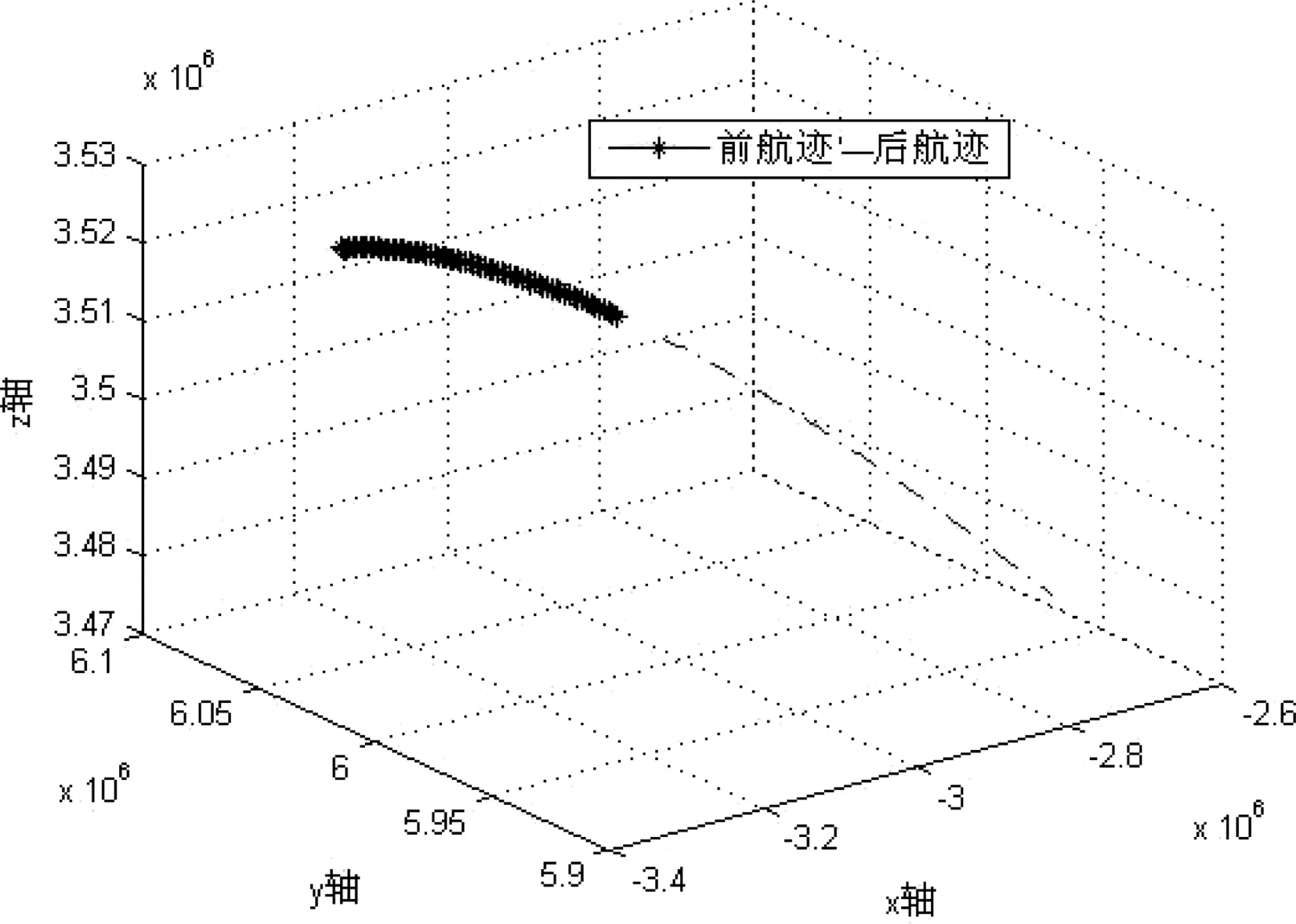
圖4 遞推前航跡
圖5 遞推后航跡
圖6中“*”表示為前航跡向后遞推得到的部分,“+”表示后航跡前向遞推得到的部分,其中遞推部分放大之后的圖像可見(jiàn)圖7。再利用航跡關(guān)聯(lián)的方法,即可判斷出兩部分航跡屬于同一目標(biāo)。

圖6 遞推部分詳細(xì)表示
5.2 群目標(biāo)仿真
在5.1的基礎(chǔ)上,假設(shè)同時(shí)有10批次彈道導(dǎo)彈目標(biāo)進(jìn)入兩部雷達(dá)威力區(qū)域。進(jìn)行多次關(guān)聯(lián)判斷仿真,其中一次的目標(biāo)在雷達(dá)威力區(qū)域軌跡圖如圖7所示。
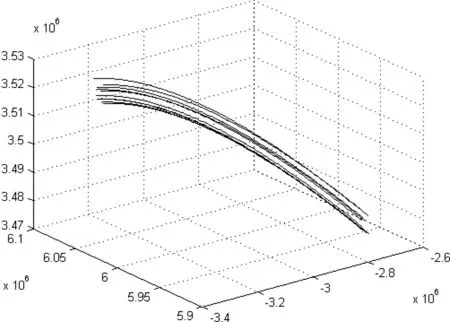
圖7 群目標(biāo)運(yùn)行軌跡
此時(shí),兩部雷達(dá)對(duì)群目標(biāo)探測(cè)的航跡圖像及航跡遞推后關(guān)聯(lián)圖像如圖8、圖9所示。
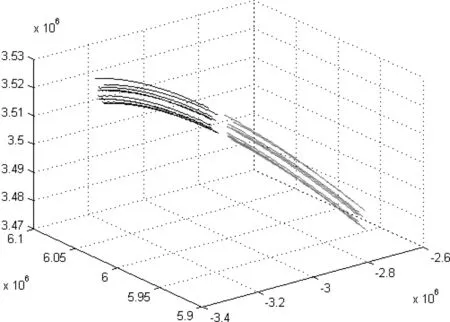
圖8 兩部雷達(dá)分別測(cè)得目標(biāo)軌跡

圖9 遞推后航跡
從上述圖中可以看出目標(biāo)在雷達(dá)威力區(qū)域明顯的航跡中斷現(xiàn)象,再通過(guò)遞推關(guān)聯(lián)判斷等方法處理后可以得出多目標(biāo)航跡的關(guān)聯(lián)情況。
針對(duì)上述多目標(biāo)情況進(jìn)行30次仿真,結(jié)果如表1所示。

表1 多目標(biāo)關(guān)聯(lián)效果
6 結(jié)束語(yǔ)
本文提出了一種利用目標(biāo)狀態(tài)進(jìn)行航跡關(guān)聯(lián)的方法。仿真結(jié)果證實(shí),該方法關(guān)聯(lián)正確率較高,能夠較好地解決在多傳感器低重合率情況下的彈道目標(biāo)航跡關(guān)聯(lián)問(wèn)題。這對(duì)后續(xù)的航跡識(shí)別、平滑處理以及航跡管理具有較大的參考價(jià)值。
[1] 唐宏斌,鄭健,李駿,姜文利,周宇.基于主動(dòng)段狀態(tài)估計(jì)的彈道估計(jì)方法研究[J]. 戰(zhàn)術(shù)導(dǎo)彈技術(shù),2007(3):27-31.
[2] 何友,修建娟,張晶煒,等.雷達(dá)數(shù)據(jù)處理及應(yīng)用[M].北京:電子工業(yè)出版社,2005:26-28,139-144.
[3] 吳紅,等.彈道導(dǎo)彈自由段跟蹤初始狀態(tài)估計(jì)方法研究[J]. 計(jì)算機(jī)仿真,2006(6).
[4] 張榮濤.多雷達(dá)跟蹤彈道導(dǎo)彈交接預(yù)報(bào)技術(shù)研究[J]. 現(xiàn)代雷達(dá),2010(8).
[5] 俞建國(guó),劉梅,陳錦海, 等.彈道目標(biāo)航跡片段關(guān)聯(lián)及優(yōu)化[J]. 航空學(xué)報(bào),2011,32(10).
[6] William J F.Interacting multiple model filter for tactical ballistic missile tracking[J].IEEE Trans. on Aerospace and Electronic Systems,2008,44(2):418-426.
Research on track correlation technology of ballistic targets for multiple sensors with low overlapping rate
ZHU Guan-yu, ZHOU Yan, GUO Ge, XU Ying, LI Chang-xi
(Air Force Early Warning Academy, Wuhan 430019)
On account of such factors as high moving speed, wide span space and big measurement error for ballistic targets, the track interrupt caused by low overlapping rate is a relatively common phenomenon when multiple sensors are tracking the targets cooperatively and it is a serious problem that needs to be solved. Aimed at this problem, a method of using the target state to perform track correlation is proposed through extending the existing tracks. The test results show that the method can effectively solve the problem of track correlation of ballistic targets with low overlapping rate.
ballistic target; track prediction; track correlation; multiple sensors
2014-05-03;
2014-05-16
朱冠宇(1990-),男,碩士研究生,研究方向:信息融合;周焰(1966-),男,教授,研究方向:信息融合與圖像處理;郭戈(1985-),男,博士研究生,研究方向:信息融合;徐穎(1985-),女,博士研究生,研究方向:信息融合與圖像處理;李昌璽(1986-),男,博士研究生,研究方向:信息融合。
TN957.522
A
1009-0401(2014)03-0056-05
猜你喜歡
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56