基于MRAS的船舶推進電機轉子磁場定向實時校正技術
2014-08-11 14:49:09李國鋒夏建民
造船技術 2014年1期
李國鋒, 夏建民
(北車永濟新時速電機電器有限責任公司, 陜西 西安 710016 )
基于MRAS的船舶推進電機轉子磁場定向實時校正技術
李國鋒, 夏建民
(北車永濟新時速電機電器有限責任公司, 陜西 西安 710016 )
磁場準確定向是利用電動機間接磁場定向控制技術實現轉矩和勵磁解耦獨立控制的關鍵,影響著整個船舶交流電推進系統的穩態和動態性能。通過對船舶電推進電動機矢量控制過程中的磁場定向方式進行演繹,以觀測轉子q軸磁鏈為模型,分析轉子磁鏈大小、位置,并利用MRAS理論通過自適應調節實現轉子磁場定向實時校正。在實際應用中證明了理論的正確性和磁場準確定向校正策略的有效性。
電動機 磁鏈觀測q軸磁鏈誤差 模型參考自適應系統
1 引言
交流異步電動機的動態數學模型是一個高階、非線性、強耦合的多變量系統。它的電流、電壓、磁通和電磁轉矩等量均處于相當復雜的耦合狀態之中。上世紀70年代,西門子工程師F.Blaschke首先提出異步電動機矢量控制理論解決交流電機轉矩控制問題,目前這種理論已廣泛應用于各種交流傳動系統,特別是在新興的船舶電推進系統中得到應用和驗證。矢量控制實現的基本原理是通過測量和控制異步電動機定子電流矢量,根據磁場定向理論分別對異步電動機的勵磁電流和轉矩電流進行控制,從而達到異步電機轉矩控制的目的。高性能異步電動機矢量控制系統建立在轉子磁場準確定向的基礎之上,然而電機運行過程中,容易受到溫度、頻率、磁路飽和和雜散損耗等工況的影響,造成磁鏈觀測誤差及電磁轉矩觀測誤差,導致異步電動機運行在弱磁或者磁場飽和狀態,加劇電機轉矩脈動和轉速脈動。目前應用中的船舶交流電推進系統中控制變流器已經具備異步電動機參數自適應辨識功能,使變頻器在驅動推進電動機進行正常運行過程中自動完成電動機參數的辨識,同時根據辨識結果調制控制算法中的有關參數,達到矢量控制的最優化。
模型參考自適應系統(Model Reference Adaptive System,簡稱MRAS)是利用不含待辨識參數的參考模型和含有待辨識參數的可調模型相減得到一個輸出誤差,然后設計一個自適應規律改變可調模型的輸出值,使得可調模型和參考模型輸出誤差為零。原理如圖1所示。
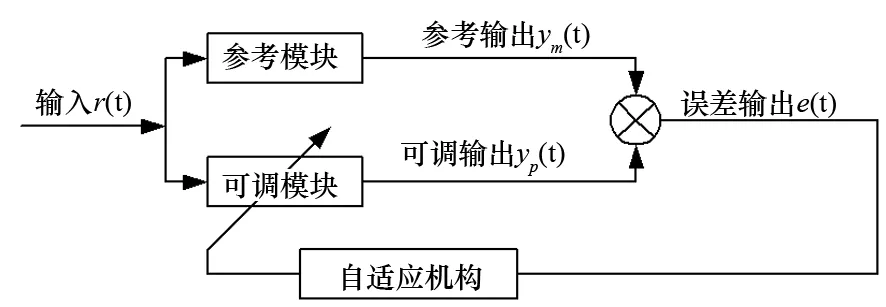
圖1 模型參考自適應控制結構圖
船舶電推進中推進電機的矢量控制以q軸磁鏈為模型,涉及到牽引電機的轉子磁鏈觀測、定子電壓重構、定子電流檢測、轉差頻率的計算和補償等,實現精確的矢量控制。
2 轉子磁鏈觀測
異步電機轉子磁鏈的大小和位置、磁鏈的準確估計對電機的控制性能非常關鍵,轉子磁場定向即是按轉子全磁鏈矢量Ψr定向。要得到轉子磁鏈矢量的幅值和相位,可通過異步電動機磁鏈模型進行計算,模型分為電流模型和電壓模型,兩種模型是進行轉子磁鏈觀測的常用模型,船舶推進變流器控制中磁鏈測量觀測使用的是電壓模型。
在靜止兩相α-β坐標系中由異步電機的電壓方程式可以得出:
(1)
式中:usα、isα為定子在α軸的電壓和電流;usβ、isβ為定子在β軸的電壓和電流;Rs、Ls為定子繞組的電阻和電感;Lm為定轉子繞組間的互感。
牽引電機轉子磁鏈方程為
(2)
式中:Ψrα、Ψrβ為α軸和β軸的定子磁鏈;irα、irβ為轉子在α、β軸的電流。
由式(2)得到轉子電流在α、β軸分量:
(3)
利用式(3)把式(1)中的irα、irβ置換并整理后得到:
那怎么辦,等還是不等?真的交給運氣?比較靠譜的方法我認為是斟酌考慮,比如從車流量看路況,從差不多路線的其它公交車上猜測情況,再可憑多日坐車的經驗等等來判斷。
(4)
式中:σ為漏感系數。
式(4)構成轉子磁鏈電壓模型如圖2所示。
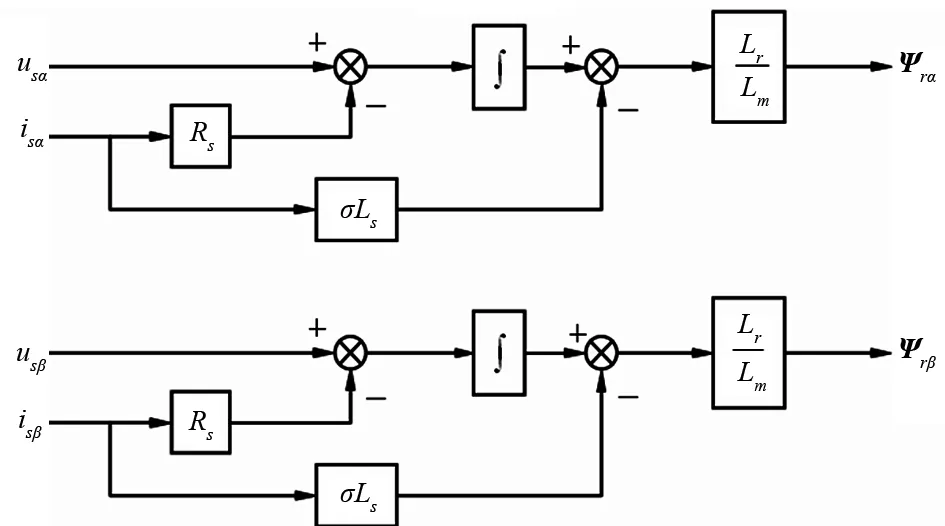
圖2 電壓模型磁鏈觀測器運算框圖
基于電壓模型法的磁鏈觀測需要定子電阻、定子電感、轉子電感、定轉子互感等參數,船舶推進變流器的控制過程中假定定子電感、轉子電感不變,定轉子互感則考慮了氣隙磁通變化造成的影響,定子電阻的變化則通過安裝在定子上的溫度傳感器的反饋進行校正計算,定子電流利用電流傳感器進行測量,電壓信號則通過電壓重構來確定。
船舶電推進變流器采用電壓源逆變器技術,利用電壓重構技術得到磁鏈觀測器中的電壓變量值,電壓重構方式選擇基于PWM(脈寬調制Pulse Width Modulation)占空比配合中間電壓測量并考慮針對半導體器件軟件補償技術來實現。理想的輸出電壓重構計算為
(5)
式中:Van、Vbn、Vcn為變頻器輸出三相電壓;s1、s2、s3為三相橋臂上橋臂的占空比;Vdc為中間直流回路電壓值。
由于半導體器件為非理想器件,人為設置的死區時間、開通時間、關斷時間以及器件的管壓降都會造成輸出電壓的失真,經過補償后重構的變頻器輸出電壓為[2]
(6)

基于電壓模型法和電壓重構形成的機車牽引電機轉子磁鏈觀測器內部模塊結構圖,如圖3所示。

圖3 磁鏈觀測模型框圖
電壓模型法用于高速時性能比較好,低速時因電機產生的反電勢較小,在此基礎上計算得到的轉子磁鏈不太準確;由于船舶推進電機配置了轉速傳感器,因此低速時選擇磁鏈開環的轉差頻率矢量控制方式來過渡,此時根據性能需求允許在機車啟動時考慮預勵磁功能。
3 基于q軸磁鏈的MRAS參數辨識與校正
電壓模型磁鏈觀測器可以實現轉子磁鏈的觀測,且觀測器不受轉子電阻變化的影響,但模型中包含定子電阻Rs、Ls、Lr、Lm等電動機參數,這些參數的穩定性不同但都不是固定不變的;同時電壓模型包含積分項,積分的初始值和累計誤差都會影響到計算結果,使電壓模型不夠準確,影響到磁鏈的觀測精度。船舶推進電機磁鏈觀測采用在線參數自適應辨識的方法進行實時校正,基本框圖如圖4所示。

圖4 基于q軸磁鏈的MRAS系統計算框圖
以轉子磁場定向的矢量控制系統中,將同步旋轉坐標系的d軸固定在轉子磁鏈相同方向上,此時轉子磁鏈在q軸上的分量應該為0。由于磁鏈觀測的誤差,會導致轉子磁鏈在dq軸上的分量重新分配,除了d軸存在轉子磁鏈分量外,q軸會存在磁鏈分量而不再為0。為此構成磁鏈方向的自適應調節模型,如圖5所示。
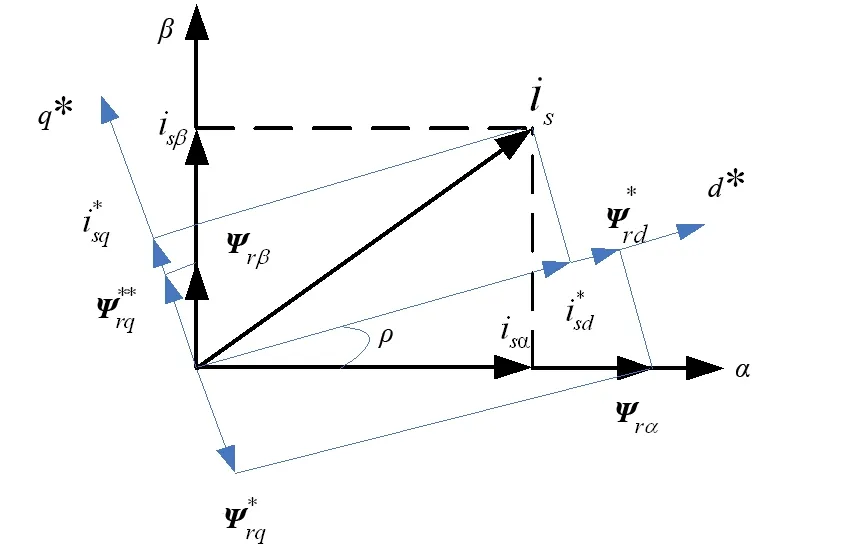
圖5 自適應調節模型
根據圖5構造的q軸磁鏈可調模型為
(7)
MARS自適應調節的過程為:利用重構的電壓和采樣得到的電流進行磁鏈觀測,經過旋轉坐標變換得到q軸磁鏈分量Ψadj,如果該值不為0,意味著轉子磁場定向不準確,這來源于旋轉坐標變換所采樣的磁場定向角度ρ不準確,ρ的偏差則在于轉差頻率計算時所選擇的電機參數的偏差,針對電機參數偏差的實時校正,不僅提高磁鏈觀測的準確性,同時也為電機參數的實時校正提供條件。
對于自適應機制的選取,有兩種較常用的設計方法,李雅普諾夫定理和超穩定性理論。對于高階的線性系統或者多個自適應變量的系統,自適應機制的設計比較繁瑣,數學推導復雜,計算量大。船舶交流傳動推進系統在假設條件下使可調模型是一階變量,采用最簡單的自適應機制:PI調節器。比較特別的是參考模型設定為0,當q軸磁鏈不為0時,偏差將經過PI調解,產生一個轉差頻率補償值Δ(見式8),針對補償后的轉差頻率經過積分環節后修正磁鏈角度。
(8)
4 結論
基于大功率、高電壓等級IGBT的變流器矢量控制策略有其自身的特點和規律,這些特點和規律已經在船舶上得到應用,驗證了系統抵抗參數變化和抗干擾的魯棒性。船舶電推進系統是本公司針對高鐵技術引進關鍵核心技術消化吸收并推廣應用的成果,以高鐵技術引進為基礎的大功率交流電傳動系統在船舶電推進領域的推廣僅僅是個開始,將為后續基于3 300 V/1 500 A、4 500 V/900 A、6 500 V/600 A等級IGBT器件,單軸電推進功率達到8 MW、16 MW的船舶交流電推進系統的應用開發積累經驗。
[1] 陳伯時,陳敏遜.交流調速系統[M].北京:機械工業出版社,2013.
[2] 冬雷,李永東,王文森等.矢量控制中感應電動機轉子電阻的自適應辨識[J].電工技術學報,2002,17(4):13-17.
[3] 孫向東,尚媛,鐘彥儒等.三相電壓源逆變器輸出電壓重構技術的研究[J].西安理工大學學報,2005,21(2):122-124.
[4] Lorenz R D. A Simplified Approach to Continuous On-Line Tuning of Field-Oriented Induction Machine Drives[J].Industry Applications,IEEE Transactions on,1990,3(26):420-424.
The MRAS-based Rotor Flux Orientation Real-time Correction Technique for Traction Motor of ship
LI Guo-feng, XIA Jian-min
(Technical Center,NCR Yongji Xinshisu Motor Electrical Equipment Co., Ltd.,Xian Shannxi 710016, China)
Accurate flux orientation is the key to achieve decoupling and independent control for torque and excitation using indirect field oriented control technology of electric motor, which has an influence on static and dynamic performance of the whole ship’s AC propulsion system. In this paper, the mode of flux orientation in ship’s propulsion motor vector control process is deducted. Based on the rotor q-axis flux model, we analysis the magnitude and location of the rotor flux, and by using the MRAS theory and adaptively adjusting to realize the real-time correction of rotor field oriented Experimental results verify that theoretical analysis is correct and correction strategy for accurate field orientation is effective.
Traction motor Flux estimationq-axis flux error MARS
李國鋒(1969-),男,高級工程師。
U672
A
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
光學精密工程(2016年6期)2016-11-07 09:07:19
