AR預測模型的IMM跟蹤算法
2014-08-05 02:41:14仵國鋒胡捍英
計算機工程與應用 2014年24期
竹 博,周 游,仵國鋒,胡捍英
解放軍信息工程大學,鄭州 450002
AR預測模型的IMM跟蹤算法
竹 博,周 游,仵國鋒,胡捍英
解放軍信息工程大學,鄭州 450002
1 引言
機動目標跟蹤已廣泛應用于軍事和民用領域,近幾十年來,人們對該問題進行了廣泛而深入的研究。運動模型的建立和濾波過程是機動目標跟蹤兩個十分重要的過程,其中,濾波過程是建立在目標運動模型的基礎上進行的。
針對運動模型的建立,只有當采用的運動模型與目標的運動形式相匹配時,跟蹤精度才比較理想。但是機動目標的運動形式不可能始終被單一的運動模型所表征。當前解決目標運動模型不確定的主要方法是交互式多模型濾波算法(IMM)[1-3],其特點是可以在多個模型之間“轉換”,自動調節模型概率,很適合機動目標的跟蹤。然而該方法也存在問題:如果模型比較少,不能覆蓋目標的運動狀態,導致跟蹤精度不夠;模型數量比較多時,會帶來模型間不必要的競爭而使得性能下降。針對濾波過程,經典非線性濾波算法有基于一階泰勒級數展開的擴展卡爾曼濾波器(EKF)和無跡卡爾曼濾波(UKF)[4-6]。EKF的性能在很大程度上依賴于局部非線性程度,對于強非線性系統的跟蹤存在較大誤差,而UKF突破傳統的隨機采樣,通過加權采樣進行迭代獲得參數的最優解,很好解決了非線性濾波問題。在LOS環境下,觀測噪聲服從高斯分布,UKF可以獲得良好的跟蹤性能,但是在NLOS環境下,噪聲服從非高斯分布[7],不再符合UKF的高斯假設,造成其跟蹤性能明顯下降,嚴重時導致發散。文獻[8]提出了一種結合M估計的改進的無跡卡爾曼濾波器,以解決其中的非高斯問題,并取得了良好的性能。
基于以上分析,本文從運動模型的建立和濾波過程分別對傳統算法進行改進。首先,針對傳統建模方法不能很好地描述目標機動過程導致跟蹤性能差的問題,本文利用AR預測模型對具有未知參數的目標運動狀態建模,并實時更新目標的運動方程來準確描述目標的運動狀態。其次,對于同一個基站,目標在運動過程中的LOS與NLOS狀態可能會發生轉換,針對傳統的濾波算法未考慮這一轉換過程導致跟蹤性能差的問題,本文利用馬爾可夫鏈來描述LOS與NLOS狀態的轉換過程,對于LOS狀態匹配UKF,對于NLOS狀態匹配RUKF。算法首先利用AR預測模型對目標運動狀態建模,然后通過IMM方法得到移動臺的估計位置,最后利用該位置更新AR預測模型的參數,從而更準確地預測出下一時刻的目標位置。仿真結果表明,在LOS/NLOS混合條件下,該算法能較好地實現對機動目標的魯棒跟蹤。
2 目標跟蹤模型
假設移動臺的狀態向量為 x(n)=[x(n) x˙(n) x¨(n) y(n) y˙(n) y¨(n)]T,分別表示沿x和 y方向的位置、速度和加速度,移動臺在n時刻的狀態方程如下:

其中,A為狀態轉移矩陣,w(n)是過程噪聲,服從均值為0,方差為σ2w的高斯分布,G為輸入矩陣。
在n時刻的觀測方程如下:
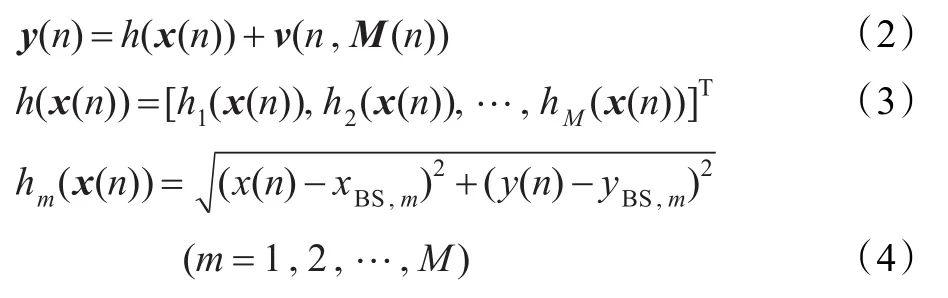
hm(x(n))表示n時刻移動臺與第m個基站的真實距離。M(n)表示n時刻基站與移動臺之間的信道狀態,觀測噪聲v(n,M(n))與狀態變量 M(n)有關。在LOS狀態下,觀測噪聲服從均值為0,方差為σ2G的高斯分布,而在NLOS狀態下,觀測噪聲服從均值為μ的指數分布[9],如下式所示:

3 基于AR預測模型的IMM算法
3.1ARIMM算法概述
針對LOS/NLOS混合條件下對機動目標的魯棒跟蹤問題,本文提出一種基于AR預測模型的交互式多模型(IMM)跟蹤算法。算法原理框圖如圖1所示,分為兩個模塊:AR預測模塊和IMM濾波模塊。AR預測模塊的作用是實時更新目標的運動方程,以匹配目標的真實運動狀態。IMM濾波模塊的作用是從受噪聲污染的觀測向量中得到目標的狀態信息。IMM的模型集包括LOS和NLOS兩種模型,即M=2,模型集的選擇具體見3.2節。算法首先將觀測向量 y(n)進行交互式多模型濾波,得到狀態向量x^(n),然后通過AR預測模型來更新當前時刻狀態方程x(n+1)=Ax(n)+w(n),從而使得下一時刻的預測值更加逼近實際位置,實現精確跟蹤。
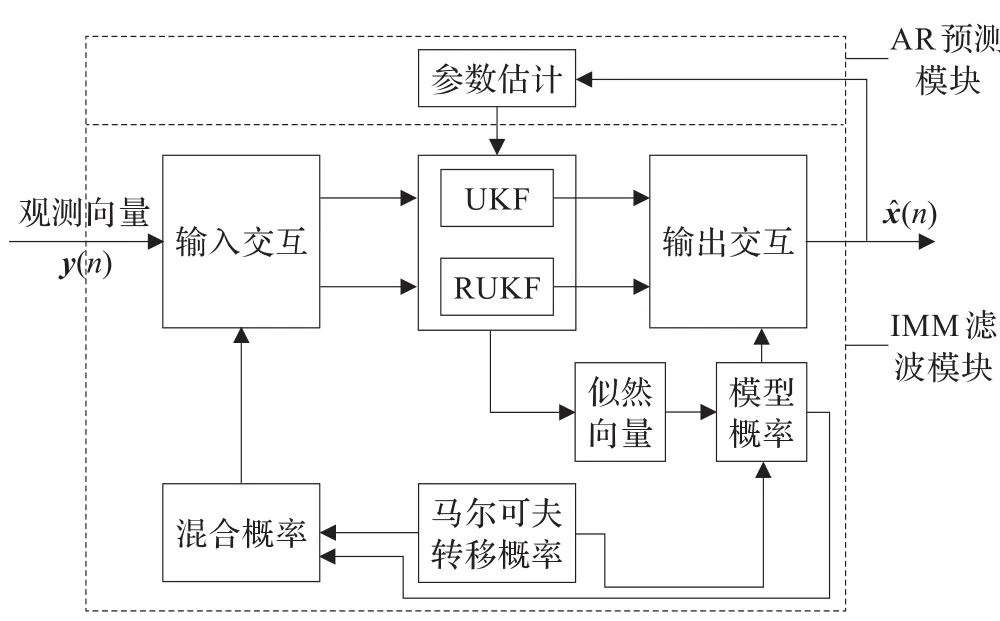
圖1ARIMM算法原理圖
3.2 IMM模型集選擇
對于一個基站,移動臺處于運動中的LOS與NLOS狀態可能會發生變化,狀態轉換過程服從馬爾可夫過程[10],如圖2所示。
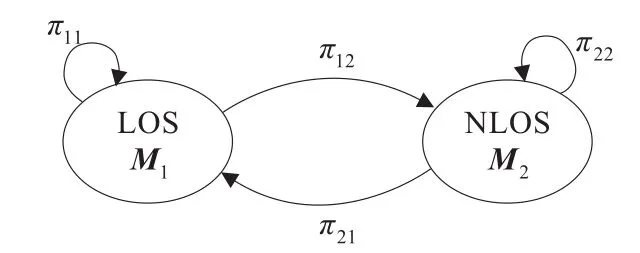
圖2 LOS/NLOS馬爾可夫轉移過程
對于M個基站,就有r=2M種狀態,假設不同基站的LOS與NLOS狀態轉移過程相互獨立,此時的一步轉移概率矩陣:
式中,?表示Kronecker相乘,Πm表示第m個基站的一步轉移概率矩陣。
文獻[11]針對M個基站時共有的r=2M種LOS與 NLOS狀態組合,例如,M=3時存在M1,M2,…,M8種狀態組合,分別為{LOS,LOS,LOS},…,{NLOS,NLOS,NLOS}。需要對每種組合分別匹配一個EKF進行濾波,以完成目標的跟蹤。隨著M的增加,計算量呈指數增長,嚴重影響了跟蹤的實時性。為降低計算復雜度,本文采用兩種狀態:M′1表示所有的基站都處于LOS狀態;M′2表示所有的基站都處于NLOS狀態。當基站處于 M2,M3,…,Mr-1狀態時,狀態估計的結果均可以由上述兩個狀態下的濾波結果線性組合得到。對于M′1狀態,匹配UKF進行濾波,此時觀測協方差矩陣R(k)= σ2GIM,一步轉移概率 p′12=1-p11;對于M′2狀態,匹配RUKF進行濾波,觀測協方差矩陣R(k)=(σ2G+ μ2)IM,一步轉移概率 p′21=1-prr。
3.3 AR預測模型
移動臺在n+1時刻的狀態方程可以如下表示:

其中,A為狀態轉移矩陣,w(n)服從均值為0的高斯分布,協方差矩陣為Q,矩陣A和Q可以通過Yule-Walker方程得到[12]。本文仿真部分利用真實 x(n),n=1,2,3來對算法進行初始化。
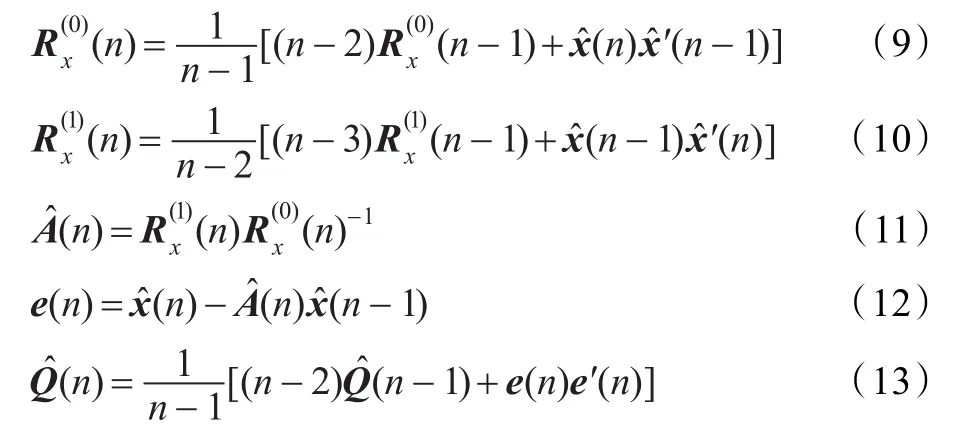
算法的初始化(n=1,2,3):
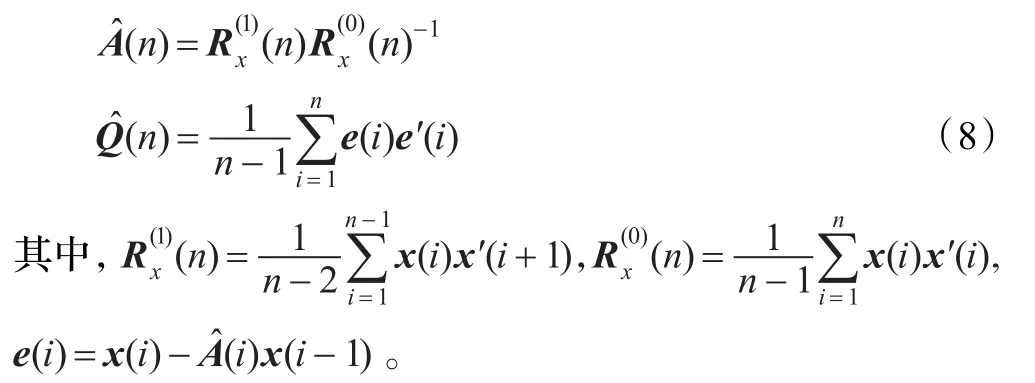
x^(n)是上文中交互式多模型算法(IMM)n時刻的狀態估計輸出,反過來又更新和。遞推估計過程如下(n=4,5,…):
3.4ARIMM算法步驟
ARIMM算法分為以下五個步驟:
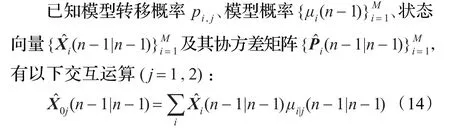
步驟1輸入交互運算
步驟2模型匹配濾波
在步驟1的基礎上,通過模型匹配濾波器,得到各模型的狀態估計和協方差估計。LOS狀態匹配的是無跡卡爾曼濾波器,NLOS狀態匹配的是改進的無跡卡爾曼濾波器。
對于無跡卡爾曼濾波器(j=1):
式(1)和式(2)可寫為Z(n)=D(n)X(n)+V(n),然后利用改進的無跡卡爾曼濾波方法求出狀態估計和協方差矩陣輸出為和。
因無跡卡爾曼濾波和改進的無跡卡爾曼濾波比較常見,限于篇幅,在此不做贅述,具體參考文獻[6]和文獻[8]。
步驟3模型概率的更新
在每一時刻模型概率都必須進行更新,該過程和一般IMM相似。 Λj(n)=N(vj(n);0,Sj(n)),vj(n)為新息,Sj(n)為新息的協方差矩陣。
步驟5運動模型參數估計
4 仿真實驗及分析
仿真1針對移動臺勻速直線運動,未發生機動時,分別在不同噪聲環境下對UKF,RUKF,IMM算法進行仿真實驗,并對其性能進行分析。
仿真結果如圖3~圖5。其中,圖3是當ε=0時,即三個基站都處于LOS狀態時UKF,RUKF,IMM三種算法的跟蹤性能,圖4是當ε=0.25時三種算法的跟蹤性能,圖5是當ε=0.5時三種算法的跟蹤性能。文獻[13]指出當污染度高于50%時,RUKF算法達到“潰點”,帶來跟蹤性能的嚴重下降,故本文未對污染度高于50%的情況進行仿真。從仿真結果可以看出:當所有基站都處于LOS狀態時,UKF算法的跟蹤精度最高,其次是IMM和RUKF算法;當污染度ε=0.25時,IMM算法的跟蹤精度最高,其次是RUKF和UKF算法:當污染度ε=0.5時,RUKF算法的跟蹤精度最高,其次是IMM和UKF算法。從理論上分析,當觀測噪聲服從高斯分布時,無跡卡爾曼濾波器能獲得最優估計,性能比較好。而當噪聲服從非高斯分布時,無跡卡爾曼濾波器的性能會變差,魯棒無跡卡爾曼濾波由于采用了M估計,可以有效減弱或消除觀測值中粗差的影響,達到較好的跟蹤效果。而本文的交互式多模型算法正是結合了這兩種濾波器的優點,在污染度小的情況下,UKF對精度的提高起主要作用,在污染度大時,RUKF對粗差影響的減弱起主要作用,因此在LOS/NLOS混合條件下實現了對機動目標的跟蹤精度與魯棒性的良好折中。
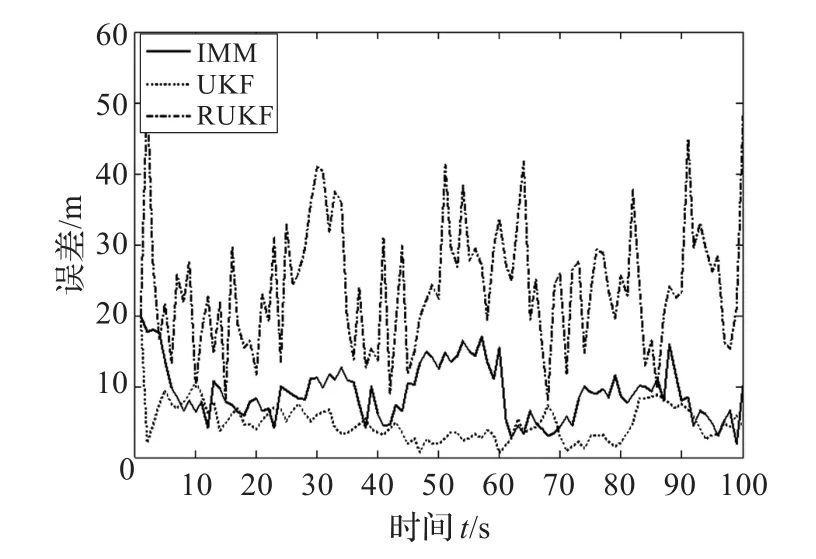
圖3 污染度ε=0時三種算法性能
三種算法的平均跟蹤誤差如表1所示,在低污染度(ε=0)時,IMM算法和UKF算法性能相當;在ε=0.25時,IMM算法性能明顯優于UKF和RUKF;在高污染度(ε=0.5)時,IMM算法和RUKF算法性能相當。可以看出,在不同的污染度下,IMM算法都能保持良好的跟蹤性能,因此,與傳統的UKF和RUKF算法相比,該算法有更好的魯棒性。
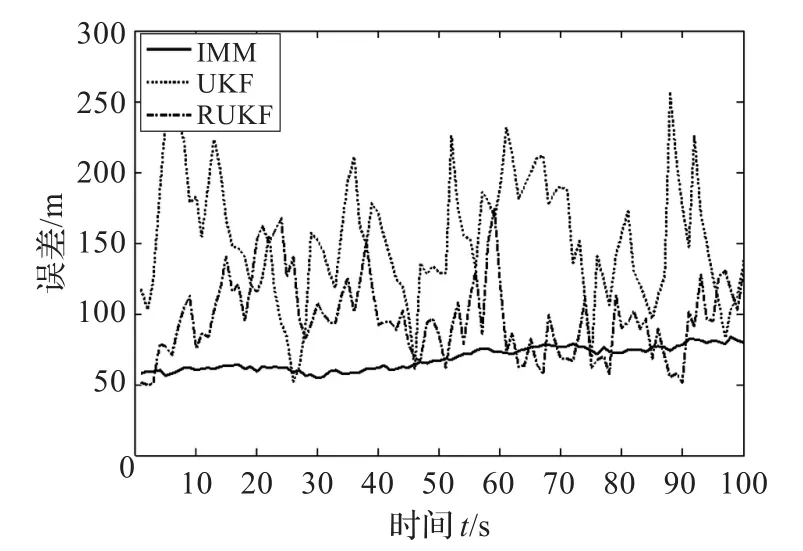
圖4 污染度ε=0.25時三種算法性能
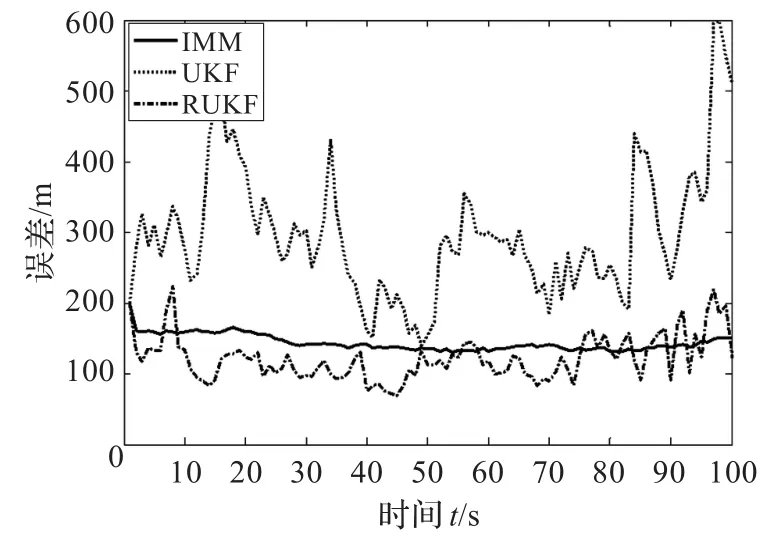
圖5 污染度ε=0.5時三種算法性能
仿真2針對移動臺發生機動時,在LOS/NLOS混合條件下對IMM和ARIMM算法進行仿真實驗,并對其性能進行分析。
移動臺的運動軌跡如圖6中實線所示。在運動的過程中,對于LOS狀態,觀測噪聲服從均值為0,方差σ2w=602的高斯分布,對于NLOS狀態,觀測噪聲服從均值μ=100的指數分布,觀測值的污染度ε=0.25。從圖7可以看出,當移動臺發生機動時,ARIMM算法的平均誤差為33 m,而IMM算法的平均誤差為107 m,ARIMM的跟蹤性能更好,從理論上分析,ARIMM算法通過迭代的思想不斷更新AR預測模型中的參數,從而使AR模型與真實運動狀態更匹配,實現精確跟蹤;而IMM算法中,狀態方程是恒定的,當移動臺發生機動時,運動狀態不再符合初始的狀態方程,就會導致下一時刻的預測值嚴重偏離真實位置,從而導致跟蹤性能的下降。
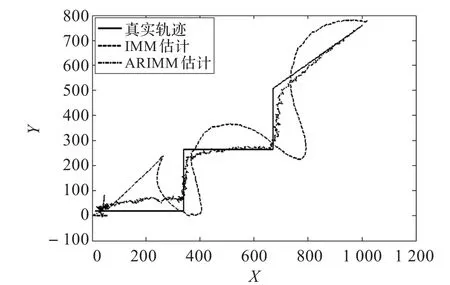
圖6 移動臺真實軌跡和估計軌跡

表1 UKF、RUKF、IMM三種算法平均跟蹤誤差比較m
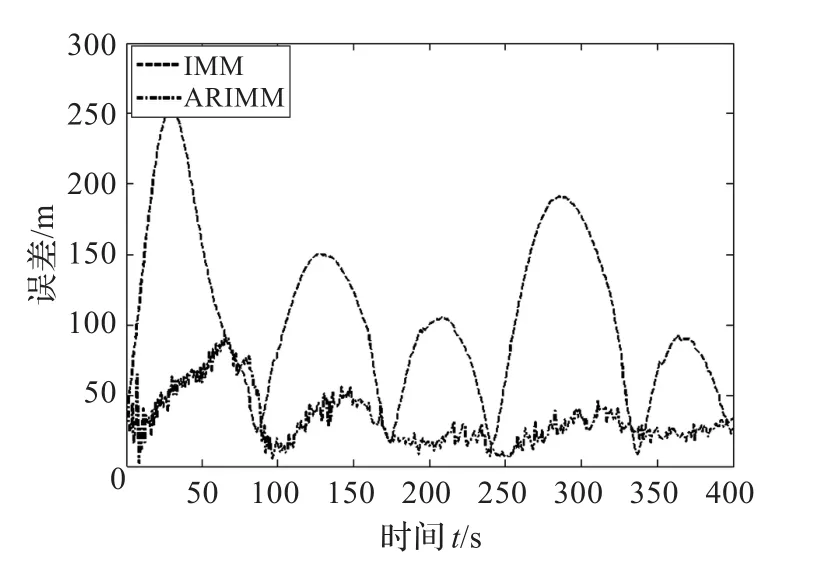
圖7 兩種算法的誤差性能
下面來分析算法的計算效率,仿真計算機的配置如下:CPU為Intel?奔騰?4 2.8 GHz內存為1 GB,操作系統為Windows XP,仿真軟件為MATLAB R2006。UKF、RUKF、IMM和ARIMM四種算法仿真所需的時間如表2所示。

表2 不同濾波算法計算時間
從表2可以看出,UKF的運算時間最少,單次運行時間為43.572 2 ms。RUKF由于其采用了M-估計,增加了運算量。而IMM算法由于并行使用了UKF和RUKF算法,使其運算量大大增加。本文的ARIMM算法和IMM算法區別在于,IMM算法中使用恒定的狀態模型,而ARIMM算法中使用了AR預測模塊實時更新目標的運動狀態,導致本文算法的運算時間比IMM有所增加。由于文中的AR預測模型為一階,當前時刻的狀態更新僅與上一時刻有關,運算過程和IMM算法中的交互、濾波模塊相比運算簡單,因此本文算法的運算時間較IMM算法稍有增加,大約增加了7%,這對現有的硬件條件是可以接受的。綜合跟蹤精度和運算量考慮,ARIMM算法是一種在LOS/NLOS混合環境下的有效跟蹤算法。
5 結束語
針對LOS/NLOS條件下對機動目標的魯棒跟蹤,提出一種基于AR預測模型的IMM跟蹤算法。該算法利用AR預測模型描述目標的運動狀態,通過并行使用UKF和RUKF完成濾波,充分發揮了無跡卡爾曼濾波和改進的無跡卡爾曼濾波的優點,在LOS/NLOS混合條件下實現了對機動目標的魯棒跟蹤,最后通過仿真驗證了所提算法的有效性。
[1]Seah C E,Hwang I.Algorithm for performance analysis of the IMM algorithm[J].IEEE Transon Aerosp Electron Syst,2011,47(2):1114-1124.
[2]Foo P H,Ng G W.Combining the interacting multiple model method with particle filters for manoeuvring target tracking[J].IEEE Trans on Radar,Sonar and Navigation,2011,5(3):234-255.
[3]Farrel W.Interacting multiple model filter for tactical ballistic missile tracking[J].IEEE Trans on Aerosp Electron Syst,2008,44(2):418-426.
[4]Kay S.Fundamentals of statistical signal processing:estimation theory[M].Englewood Cliffs,NJ:Prentice-Hall,1993.
[5]Gustafsson F,Hendeby G.Some relation between extend and unscend kalman filter[J].IEEE Trans on Signal Processing,2012,60(2):545-555.
[6]Liu Changyun,Shui Penglang.Unscented extended Kalman filter for target tracking[J].IEEE Journal of Systems Engineering and Electronics,2011,22(2):188-192.
[7]Gezici S,Sahinoglu Z.UWB geolocation techniques for IEEE 802.15.4a personal area networks[R].Cambridge,MA,2004.
[8]Wang X,Cui N.Huber-based unscented filtering and its application to vision-based relative navigation[J].IET Radar,Sonar and Navigation,2010,4(1):134-141.
[9]Guvenc I,Chong Chia-Chin.A survey on TOA based wireless localization and NLOS mitigation techniques[J].IEEE Communication Surveys and Tutorials,2009,11(3):107-124.
[10]Li Wenling,Jia Yingmin.Location of mobile station with maneuvers using an IMM-based cubature kalman filter[J]. IEEE Trans on Industrial Electronics,2012,59(11):4338-4348.
[11]Fritsche C,Hammes U.Robust mobile terminal tracking in NLOS environment using IMM[C]//ICASSP,2009:3049-3052.
[12]Lim J S,Oppenheim A V.Advanced topics in signal processing[M].[S.l.]:Prentice Hall,1987.
[13]Cover T M,Thomas J A.Elements of information theory[M]. New York:Wiley,1991.
ZHU Bo,ZHOU You,WU Guofeng,HU Hanying
PLA Information Engineering University,Zhengzhou 450002,China
In view of the problem of robust tracking of maneuvering target under LOS/NLOS condition,an IMM algorithm based on AR prediction model is proposed(ARIMM).AR prediction model is adopted to model the motion state, and UKF and RUKF are utilized separately for the reason that the state LOS and NLOS have different distribution of observation noise,and the IMM filter is used to estimate the position of BS,and the position is used to update the current parameters in AR prediction model and the AR model is made more matched with the true motion state,therefore the algorithm can perform precisely tracking.Simulation result demonstrates that the proposed algorithm performs better robustness under LOS/NLOS condition compared with the traditional UKF and RUKF.
maneuvering target tracking;Interacting Multiple Model(IMM);Auto Regressive(AR)prediction model; Unscented Kalman Filter(UKF)
針對LOS/NLOS混合條件下對機動目標的魯棒跟蹤問題,提出一種基于AR預測模型的交互式多模型(Interacting Multiple Model,IMM)跟蹤算法(ARIMM)。該算法利用AR預測模型對運動狀態建模,針對LOS與NLOS條件下觀測噪聲的分布不同分別使用無跡卡爾曼濾波器(Unscented Kalman Filter,UKF)和改進的無跡卡爾曼濾波器(Robust Unscented Kalman Filter,RUKF),通過IMM方法估計出移動臺的位置,利用該位置更新AR模型的參數,使AR模型與真實運動狀態更加匹配,實現精確跟蹤。仿真結果表明,在LOS/NLOS混合條件下,與傳統的UKF和RUKF算法相比,該算法對機動目標跟蹤的魯棒性更好。
機動目標跟蹤;交互式多模型;自回歸(AR)預測模型;無跡卡爾曼濾波器
A
TN925
10.3778/j.issn.1002-8331.1302-0129
ZHU Bo,ZHOU You,WU Guofeng,et al.AR prediction model based IMM tracking algorithm.Computer Engineering and Applications,2014,50(24):222-226.
國家科技重大專項(No.2011ZX03003-003-02)。
竹博(1988—),男,碩士研究生,主研方向為蜂窩網定位。E-mail:zhuboapple@163.com
2013-02-22
2013-04-07
1002-8331(2014)24-0222-05
CNKI網絡優先出版:2013-04-10,http∶//www.cnki.net/kcms/detail/11.2127.TP.20130410.1554.002.html
◎工程與應用◎
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
