基于多新息理論的PID神經網絡改進算法
2014-07-23 01:37:34孫敏敏秦品樂
網絡安全技術與應用 2014年2期
關鍵詞:系統
孫敏敏 秦品樂
(中北大學計算機與控制工程學院 山西 030051)
0 引言
文[1]將PID控制與神經網絡結合,提出了PID神經網絡,PID神經網絡具有PID控制規律,與傳統的前向神經網絡相比具有神經元的輸入輸出呈現出動態性,原因在于往神經網絡中引入了比例(P)、積分(I)、微分(D)神經元。PID神經網絡同時具備傳統前向神經網絡逼近任意非線性函數的特性,能夠進行非線性,動態復雜系統的辨識與控制。文[2]采用BP算法的批處理模式進行神經元網絡權值的調整,不便于系統實時辨識和控制,受文[3]的啟發,采用BP算法的在線模式進行權重值的修正進行系統辨識,這為本文將多新息辨識算法引入PID神經網絡做了準備。PID神經網絡采用傳統的BP算法的批處理模式進行權值的修正,從辨識的精度上考慮,批處理法擬合系統實際輸入輸出的效果優于在線模式,但從實時辨識與控制角度考慮,在線模式優于批處理法。在線模式對權值的修正值利用了系統當前的輸入輸出數據,沒有利用歷史的輸入輸出數據,壞數據對網絡權值修正的影響大。丁鋒等人提出的多新息辨識方法利用當前與歷史輸入輸出數據,能減小壞數據的影響,提高系統辨識的精度。受文[4]啟發,本文將多新息辨識方法引入PID神經網絡,提出基于PID神經網絡的多新息學習算法并給出了收斂性證明,仿真實例說明能取得較好的效果。
1 PID神經網絡多新息學習算法
考慮1+?pt到t時刻的p組輸入輸出數據,PID神經網絡輸入層各節點的輸出向量為

輸出層節點的輸出向量為

理想輸出向量為

誤差函數變為
那么,PID神經網絡的隱含層至輸出層權值修改式為

網絡的輸入層至隱含層權值修改式為
從而有隱含層至輸出層權值修改式為

輸出層至隱含層權值調整式為

2 仿真實例
為了說明所提出的基于PID神經網絡的多新息學習算法的有效性,在和PID神經網絡采用的標準BP算法進行比較時,采用文獻[7]中的例子。
例1.考慮下面方程描述的非線性動態系統

其中)(ty為t時刻系統輸出,)(tu為t時刻系統輸入。

輸入函數為

網絡采用在線梯度法,每個學習回合采集200個樣本點進行學習和訓練,輸入層至隱含層權值矩陣的初始值為W(0)=[1,0.1,1;?1,?0.1,?1],隱含層至輸出層權值向量的初始值為V(0)=(0.1,0.1,0.1),其中y(t)為網絡理想輸出,d(t)為網絡實際輸出。取新息長度p=2,學習率η=0.175,當網絡學習和訓練20步后,改進算法與未改進算法的辨識結果如圖1和圖2所示。
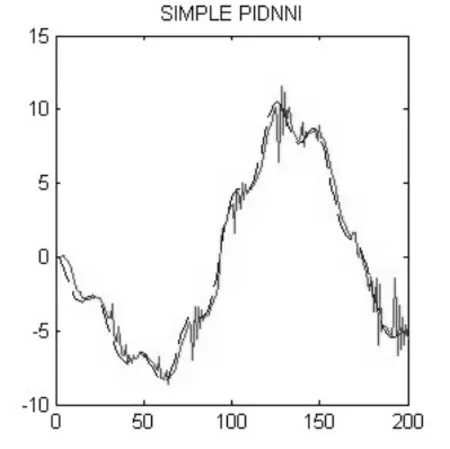
圖1 未改進算法的辨識結果
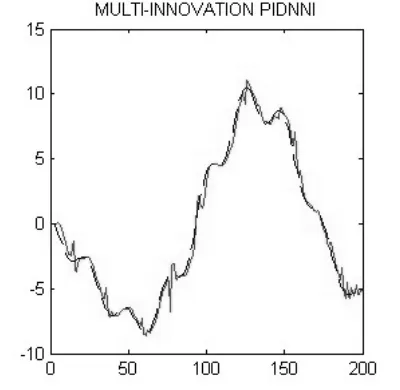
圖2 改進算法的辨識結果
3 結語
結合多新息辨識理論,推導出基于多新息理論的PID神經網絡算法。仿真實例表明所提出的算法能有效估計參數,且具有較快的收斂速度。
[1]舒懷林.PID控制與神經網絡的結合及PID神經網絡非線性控制系統[M].第十九屆中國控制會議論文集(二),2000:228-332
[2]舒懷林.PID神經元網絡及其控制系統[M].北京:國防工業出版社,2006:23-51
[3]許少云.BP學習算法的在線模式與批處理模式[M].1996年中國智能自動化學術會議論文(上冊),1996
[4]劉英玉.一種基于前向神經網絡的多新息隨機梯度算法[J].哈爾濱商業大學學報(自然科學版)2006,22(2)
[5]Feng Ding,Tongwen Chen.Performance analysis of multi-innovation gradient type identification methods.2009,43(1):1-14
[6]郭雷.時變隨機系統-穩定性、估計與控制.長春:吉林科學技術出版社,1993
[7]舒懷林.PID神經網絡及其非線性動態系統辨識能力分析[J].自動化與信息工程
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
