電子羅盤在智能吸塵器路徑分析中的應(yīng)用*
2014-07-18 11:04:02王時(shí)群張永輝曹一波
傳感器與微系統(tǒng) 2014年12期
王時(shí)群, 張永輝, 曹一波
(1.海南大學(xué) 信息科學(xué)技術(shù)學(xué)院,海南 海口 570228;2.華南師范大學(xué) 軟件學(xué)院,廣東 廣州 528225)
電子羅盤在智能吸塵器路徑分析中的應(yīng)用*
王時(shí)群1, 張永輝1, 曹一波2
(1.海南大學(xué) 信息科學(xué)技術(shù)學(xué)院,海南 海口 570228;2.華南師范大學(xué) 軟件學(xué)院,廣東 廣州 528225)
在智能吸塵器開(kāi)發(fā)和路徑規(guī)劃過(guò)程中,直線行走和轉(zhuǎn)彎所產(chǎn)生的偏差是影響路徑規(guī)劃的主要因素。為了適應(yīng)行走路徑的多變性,將電子羅盤應(yīng)用到智能吸塵器的控制系統(tǒng)中,由單片機(jī)通過(guò)I2C接口與電子羅盤進(jìn)行通信,采用Zig Bee無(wú)線模塊將數(shù)據(jù)傳輸?shù)缴衔粰C(jī),通過(guò)Matlab進(jìn)行仿真實(shí)驗(yàn),并對(duì)直線行走和轉(zhuǎn)彎偏差進(jìn)行分析研究。實(shí)驗(yàn)過(guò)程精確得出了智能吸塵器的方位信息和行走路徑,有利于優(yōu)化路徑規(guī)劃算法和提高路徑規(guī)劃效率。
智能吸塵器; 電子羅盤; 路徑規(guī)劃
0 引 言
智能吸塵器通過(guò)行走驅(qū)動(dòng)、合理的路徑規(guī)劃算法和避障算法,按照一定的規(guī)則有序地走完需要清掃的區(qū)域,實(shí)現(xiàn)室內(nèi)、寫字樓等環(huán)境的全自動(dòng)清掃[1]。然而,在實(shí)際工作中,智能吸塵器的直線行走并非想象中那樣不存在方向偏離現(xiàn)象,而且智能吸塵器需要根據(jù)周圍環(huán)境信息不斷地進(jìn)行多次轉(zhuǎn)彎以避開(kāi)障礙物,此過(guò)程中智能吸塵器的方向角受到其速度、重心位置、轉(zhuǎn)動(dòng)慣量、前后輪偏側(cè)系數(shù)、摩擦力、兩個(gè)驅(qū)動(dòng)輪的直徑以及實(shí)際地面環(huán)境等多種因素的影響[2],使得其直線行走、拐彎角度和定位變得十分復(fù)雜和難以控制,導(dǎo)致出現(xiàn)遍歷時(shí)間長(zhǎng)、重復(fù)路線多、清掃覆蓋率不佳等問(wèn)題[3]。
電子羅盤是一種能辨別方位的電子設(shè)備,磁阻效應(yīng)式三維電子羅盤具有體積小、響應(yīng)速度快等優(yōu)點(diǎn),容易嵌入到各種控制系統(tǒng)中[4]。因此,在智能吸塵器的開(kāi)發(fā)階段,可利用電子羅盤能夠獲取運(yùn)動(dòng)信息,實(shí)現(xiàn)精確分析智能吸塵器行走路徑的目的,并滿足路徑規(guī)劃需要。鑒于智能吸塵器是不斷行走的物體,因此,采用了無(wú)線通信模塊實(shí)現(xiàn)數(shù)據(jù)的無(wú)線傳輸。
1 系統(tǒng)結(jié)構(gòu)與行走實(shí)現(xiàn)過(guò)程
系統(tǒng)主要由電子羅盤模塊、單片機(jī)控制電路、Zig Bee無(wú)線通信模塊以及上位機(jī)組成,如圖1所示。其中,電子羅盤模塊采用美國(guó)霍尼韋爾(Honeywell)公司的MC5883L三軸磁阻傳感器,它通過(guò)芯片內(nèi)部的AD采樣電路對(duì)電流進(jìn)行采樣、量化和編碼后通過(guò)I2C接口將數(shù)據(jù)送入到單片機(jī)STM32F103VBT6進(jìn)行運(yùn)算后得出方向角。單片機(jī)通過(guò)Zig Bee無(wú)線點(diǎn)對(duì)點(diǎn)通信模塊[6](采用DiGi公司的XBee射頻RF模塊),將方向角數(shù)據(jù)實(shí)時(shí)從智能吸塵器傳送到上位機(jī),利用Matlab獲取串口數(shù)據(jù)并進(jìn)行在線仿真,數(shù)據(jù)由上位機(jī)軟件顯示。
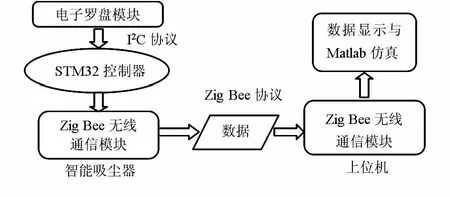
圖1 系統(tǒng)結(jié)構(gòu)框圖Fig 1 Block diagram of system structure
硬件設(shè)計(jì)上,將電子羅盤模塊嵌入在智能吸塵器的主機(jī)PCB板上。此部分程序設(shè)計(jì)中,按照I2C協(xié)議,編寫了以下主要函數(shù):
1)I2C初始化函數(shù)IIC_Init(),用來(lái)配置與電子羅盤相連的STM32的I/O端口。
2)開(kāi)始信號(hào)函數(shù)IIC_Start(),用來(lái)產(chǎn)生I2C起始信號(hào)。
3)結(jié)束信號(hào)函數(shù)IIC_Stop(),用來(lái)產(chǎn)生I2C結(jié)束信號(hào)。
4)應(yīng)答信號(hào)函數(shù)IIC_Ack(),用來(lái)產(chǎn)生I2C應(yīng)答信號(hào)。
5)發(fā)送字節(jié)函數(shù)IIC_Send_Byte(u8 txd) ,從STM32中發(fā)送一個(gè)字節(jié)的數(shù)據(jù)給電子羅盤傳感器HMC5883L,此處用來(lái)發(fā)送從機(jī)地址。
6)接收字節(jié)函數(shù)u8 HMC5883_RecvByte(),用來(lái)從I2C總線上接收電子羅盤傳過(guò)來(lái)的字節(jié)數(shù)據(jù)。
根據(jù)以上基本讀寫函數(shù)編寫如下函數(shù):
1) Init_HMC5883() 函數(shù),其功能是初始化電子羅盤傳感器,初始化電子羅盤傳感器的模式寄存器,將其設(shè)置成連續(xù)測(cè)量模式。
2)Single_Write_HMC5883(u8 REG_Address,u8 REG_data)函數(shù),其功能是向從機(jī)地址中寫入一個(gè)字節(jié)的數(shù)據(jù),用來(lái)向電子羅盤寄存器中寫數(shù)據(jù)或者命令。
3)Multiple_Read_HMC5883()函數(shù),其功能是依次從電子羅盤傳感器存放X軸、Z軸、Y軸數(shù)據(jù)的寄存器中讀出數(shù)據(jù)后存放在一個(gè)BUF數(shù)組中,為計(jì)算角度提供原始數(shù)據(jù)。
4)方位角計(jì)算函數(shù)HMC5883GetAngle(),其功能是根據(jù)BUF數(shù)組中的數(shù)據(jù)計(jì)算出電子羅盤方位角。
通過(guò)以上函數(shù)就能準(zhǔn)確得到電子羅盤的方位角,程序設(shè)計(jì)流程圖如圖2所示。

圖2 電子羅盤程序流程圖Fig 2 Program flow chart of electronic compass
2 轉(zhuǎn)角實(shí)驗(yàn)
在智能吸塵器路徑規(guī)劃研究過(guò)程中,不同的路徑需要不同的轉(zhuǎn)彎角度,同一路徑中也需要不同角度多次轉(zhuǎn)彎,尤其在障礙物形狀多種多樣的環(huán)境中。因此,需要測(cè)試智能吸塵器多次轉(zhuǎn)動(dòng)后電子羅盤讀數(shù)的誤差,以保證誤差在允許的范圍內(nèi)。由于智能吸塵器實(shí)際轉(zhuǎn)彎過(guò)程的復(fù)雜性,在對(duì)實(shí)驗(yàn)結(jié)果不會(huì)造成很大影響的情況下,簡(jiǎn)化了實(shí)驗(yàn)過(guò)程:將智能吸塵器任意放置在某個(gè)位置后,通過(guò)單片機(jī)軟件控制讓智能吸塵器按正常行走速度原地順時(shí)針依次轉(zhuǎn)動(dòng)α角,直至轉(zhuǎn)動(dòng)一周為止。表1為α=30°時(shí)電子羅盤讀數(shù),表中實(shí)測(cè)值與電子羅盤的初始放置狀態(tài)有關(guān)。
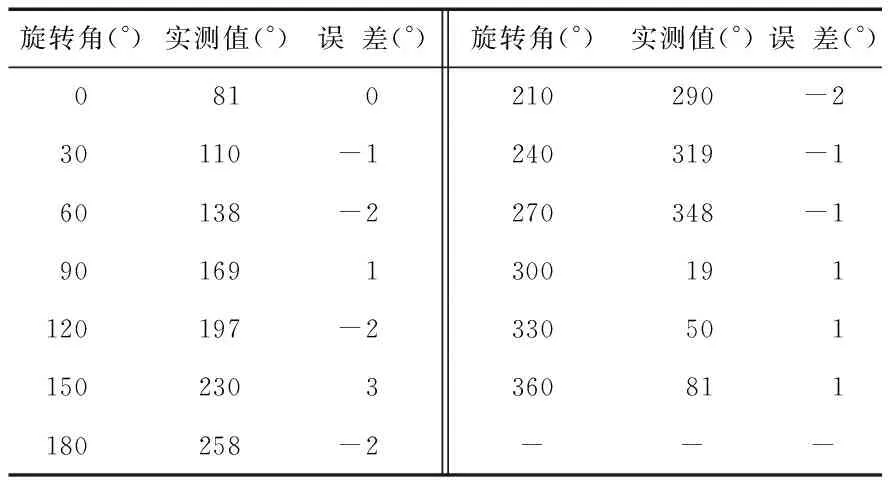
表1 轉(zhuǎn)動(dòng)30°角度電子羅盤讀數(shù)Tab 1 Electronic compass readings for 30°
從表1中可以得出,每次旋轉(zhuǎn)最大誤差為3°,累計(jì)總誤差為-4°,表明智能吸塵器并沒(méi)有完全旋轉(zhuǎn)一周,可以改變 值進(jìn)行多次實(shí)驗(yàn)。實(shí)際上每次轉(zhuǎn)角誤差不超過(guò)3°,累計(jì)總誤差不超過(guò)5°,即滿足路徑規(guī)劃要求。若需進(jìn)一步降低誤差,則對(duì)智能吸塵器的機(jī)械性能和控制算法有更高的要求。
事實(shí)上,當(dāng)智能吸塵器圍繞不規(guī)則孤立障礙物行走時(shí),若無(wú)外在因素干擾,智能吸塵器將一直圍繞孤立障礙物行走,直到控制行走模式改變?yōu)橹埂R虼?造成路徑重復(fù),可利用電子羅盤轉(zhuǎn)角讀數(shù)加以解決。電子羅盤傳感器的角度讀數(shù)變化有如下規(guī)律:當(dāng)智能吸塵器順時(shí)針轉(zhuǎn)角時(shí),電子羅盤方向角讀數(shù)逐漸增大;相反,逆時(shí)針轉(zhuǎn)角時(shí),電子羅盤方向角讀數(shù)逐漸減少。然而,在智能吸塵器圍繞不規(guī)則孤立障礙物行走過(guò)程中,前行、順時(shí)針轉(zhuǎn)角和逆時(shí)針轉(zhuǎn)角交替出現(xiàn),電子羅盤讀數(shù)也因此呈現(xiàn)非線性變化。此時(shí)只需考慮,若某時(shí)刻電子羅盤讀數(shù)與開(kāi)始圍繞孤立障礙物行走時(shí)的讀數(shù)之差為-360°,則判斷已圍繞孤立障礙物一周,可以改變行走路徑,避免路徑重復(fù)。
3 路徑仿真
為了便于仿真分析,設(shè)計(jì)了一種簡(jiǎn)單且容易實(shí)現(xiàn)的“矩形行走”路徑,以代替智能吸塵器最常見(jiàn)的“迂回式”全區(qū)域覆蓋路徑規(guī)劃。過(guò)程如下:
1)底層系統(tǒng)初始化,包括I/O輸入輸出口、A/D轉(zhuǎn)換、定時(shí)器、電子羅盤傳感器等。
2)規(guī)定智能吸塵器按照一個(gè)1.5 m×1 m的矩形順時(shí)針行走,直角拐彎n次后停止, 初始值為0。
3)每轉(zhuǎn)彎一次,計(jì)數(shù)一次,即 count++。
其詳細(xì)程序流程如圖3所示。
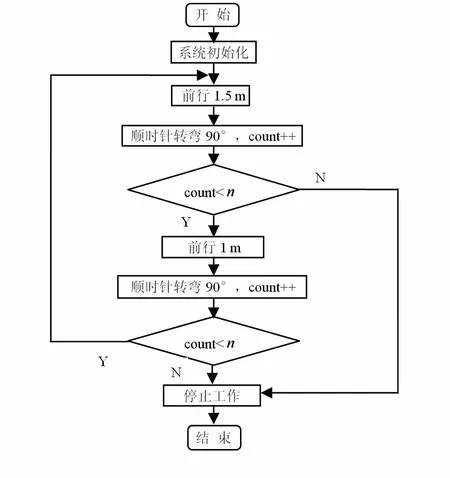
圖3 “矩形行走”程序流程圖Fig 3 Program flow chart of “rectangle walking”
電子羅盤傳感器在沒(méi)有校準(zhǔn)的情況下存在較大誤差,因此,實(shí)驗(yàn)前應(yīng)首先對(duì)其進(jìn)行校準(zhǔn)。為了得到更清晰的行走路徑軌跡,可忽略機(jī)身尺寸,利用Matlab獲取串口數(shù)據(jù)并進(jìn)行仿真,圖4為n=4時(shí)的仿真結(jié)果,電子羅盤傳感器讀數(shù)如表2所示,圖5為n=50時(shí)的仿真結(jié)果。
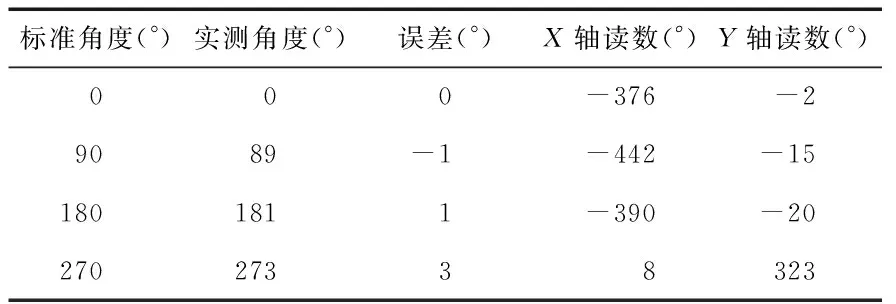
表2 90°轉(zhuǎn)角電子羅盤讀數(shù)Tab 2 Electronic compass readings for 90° angle
由表2可知,轉(zhuǎn)彎角度最大誤差為3°,累計(jì)總誤差為3°;相應(yīng)地從圖4可以看出,智能吸塵器的行走路徑并非一個(gè)完整的矩形,起始位置與最終位置不在同一地點(diǎn),直線行走和轉(zhuǎn)彎有偏差,兩者綜合影響導(dǎo)致行走軌跡出現(xiàn)偏離,已不符合智能吸塵器路徑規(guī)劃要求。除了電子羅盤自身誤差和環(huán)境誤差(鐵磁介質(zhì)干擾)影響外,樣機(jī)的重心位置和驅(qū)動(dòng)輪的機(jī)械設(shè)計(jì)問(wèn)題是主要影響因素。電子羅盤自身誤差是芯片固有的,無(wú)法徹底解決,但一般不會(huì)影響正常使用,環(huán)境誤差只需重新校準(zhǔn)電子羅盤便可消除。
重心和機(jī)械設(shè)計(jì)偏差可通過(guò)多次直線行走實(shí)驗(yàn)并結(jié)合電子羅盤讀數(shù)偏差進(jìn)行調(diào)整。長(zhǎng)距離直線行走是檢測(cè)樣機(jī)機(jī)械設(shè)計(jì)問(wèn)題的有效方法,直線行走距離越長(zhǎng),偏離軌道越明顯。一般家庭室內(nèi)區(qū)域有限,因此,只需保證智能吸塵器在一定距離范圍內(nèi)(一般為10 m)直線行走時(shí)電子羅盤讀數(shù)累計(jì)偏差低于3°即滿足要求。圖5中,由于誤差累計(jì),行走路徑嚴(yán)重偏離原來(lái)的軌跡。最終導(dǎo)致智能吸塵器行走路徑混疊,以至于出現(xiàn)重復(fù)路線多、清掃覆蓋率低等現(xiàn)象。此時(shí)需要對(duì)智能吸塵器的機(jī)械性能和控制程序進(jìn)行改善,以達(dá)到路徑規(guī)劃的要求。
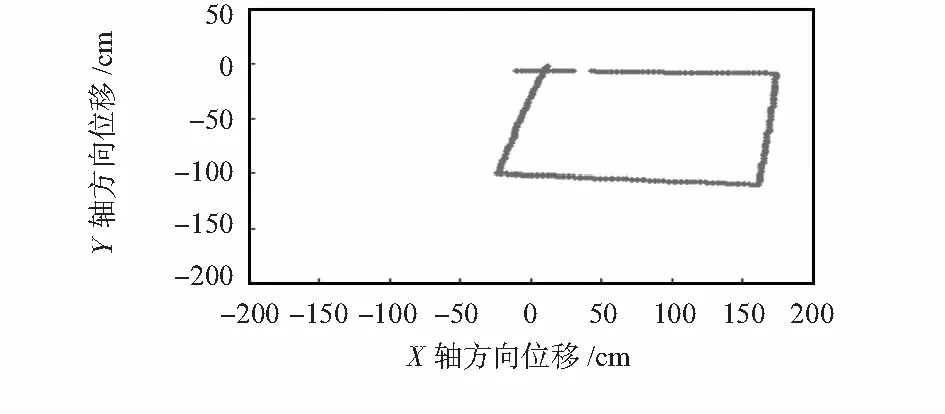
圖4 “矩形行走”一周路徑仿真結(jié)果Fig 4 Simulation results for“rectangle walking”one circle path

圖5 “矩形行走”多周路徑仿真結(jié)果Fig 5 Simulation results for“rectangle walking”multiple circle path
4 結(jié)束語(yǔ)
在智能吸塵器項(xiàng)目中,受傳感器技術(shù)和控制系統(tǒng)開(kāi)發(fā)難度的影響,路徑規(guī)劃具有一定的局限性。通過(guò)電子羅盤在智能吸塵器路徑分析中的應(yīng)用,借助無(wú)線傳輸模塊,能夠明確智能吸塵器的位置、直線行走和轉(zhuǎn)彎的路徑軌跡;通過(guò)實(shí)驗(yàn)和仿真并結(jié)合電子羅盤讀數(shù)對(duì)路徑偏差進(jìn)行分析和研究,滿足了路徑規(guī)劃中數(shù)據(jù)分析的需要,提高了分析結(jié)果的精確度;對(duì)智能吸塵器的機(jī)械性能和控制性能有更高的要求,有利于為智能吸塵器改進(jìn)有效的遍歷性能。
[1] 戴光智,許錦標(biāo),王 群.家用智能吸塵器測(cè)控系統(tǒng)的研究[J].微特電機(jī),2005(1):5-7.
[2] 艾延廷,楊明綏,崔 靜,等.智能吸塵器控制系統(tǒng)軟件設(shè)計(jì)[J].測(cè)控技術(shù),2007,26(2):73-75.
[3] 張 義.電動(dòng)噴涂機(jī)器人中的步進(jìn)電機(jī)控制[J].機(jī)器人技術(shù)與應(yīng)用,2001(5):21-24.
[4] 韓 峰.基于磁傳感器的電子羅盤的研究[D].長(zhǎng)春:吉林大學(xué),2013.
[5] 支 煒.基于AVR單片機(jī)的數(shù)字電子羅盤的研究和實(shí)現(xiàn)[D].大連:大連交通大學(xué),2009.
[6] 鐘永鋒,劉永俊.Zig Bee無(wú)線傳感器網(wǎng)絡(luò)[M].北京:北京郵電大學(xué)出版社,2011.
[7] 陶良鵬,華 蓓.無(wú)線傳感器網(wǎng)絡(luò)基于信號(hào)相關(guān)的目標(biāo)計(jì)數(shù)[J].計(jì)算機(jī)仿真,2009,26(5):65-67.
[8] Fu Yili,Li Han,Jiang Zainan,et al.Double layers fuzzy logic-based mobile robot path planning in unknown environment[J].Intelligent Automation and Soft Computing,2009,15(2):275-288.
[9] 劉 義,張 宇.基于改進(jìn)人工勢(shì)場(chǎng)法的移動(dòng)機(jī)器人局部路徑規(guī)劃的研究[J].現(xiàn)代機(jī)械,2006(6):48-49.
[10] 王等華,張翠敏.智能機(jī)器人綜合路徑規(guī)劃算法Matlab中的實(shí)現(xiàn)[J].天津工程師范學(xué)院學(xué)報(bào),2006(3):47-50.
Application of electronic compass in intelligent cleaner path analysis*
WANG Shi-qun1, ZHANG Yong-hui1, CAO Yi-bo2
(1.School of Information Science and Technology,Hainan University,Haikou 570228,China;2.School of Software,South China Normal University,Guangzhou 528225,China)
In process of intelligent cleaner development and path planning,deviation produced in straight walking and turning are main factors influencing path planning.In order to adapt to variability of walking paths,electronic compass is used to control system of intelligent cleaner,and communicate with MCU through I2C interface; Zig Bee wireless module is used to transmit data to upper PC,simulation experiments are carried out through Matlab and analyze deviation.The process of experiment accurately obtains azimuth information and walking paths,it's conducive to optimize path planning algorithm and improve efficiency of path planning.
intelligent cleaner; electronic compass; path planning
10.13873/J.1000—9787(2014)12—0155—03
2014—08—29
海南省自然科學(xué)基金資助項(xiàng)目(612129)
TP 242
A
1000—9787(2014)12—0155—03
王時(shí)群(1982-),男,湖南邵陽(yáng)人,碩士研究生,主要研究領(lǐng)域?yàn)榍度胧较到y(tǒng)開(kāi)發(fā)與應(yīng)用。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16