非線性系統主動容錯控制綜述*
2014-07-18 11:03:29毛海杰馮小林
傳感器與微系統 2014年4期
毛海杰, 李 煒, 馮小林
(蘭州理工大學 電氣工程與信息工程學院,甘肅 蘭州 730050)
非線性系統主動容錯控制綜述*
毛海杰, 李 煒, 馮小林
(蘭州理工大學 電氣工程與信息工程學院,甘肅 蘭州 730050)
以故障發生部位為分類視角,分別從傳感器故障、執行器故障及其他部件故障3個方面,較為詳細地對近5年非線性系統主動容錯控制的研究進展情況進行了歸納和總結,重點討論了執行器故障的容錯控制問題,并對所存在的問題與未來的發展趨勢進行了探討。
主動容錯控制; 非線性系統; 故障診斷
0 引 言
近30年發展起來的容錯控制技術,為提高復雜系統可靠性提供了一條有效途徑[1~3],其基本思想是利用系統的冗余資源來實現故障的容錯,即在某些部件發生故障的情況下,通過對故障的魯棒設計或系統重構、控制策略的調整等,仍能保證系統按原定性能指標繼續運行,或以犧牲性能損失為代價,保證系統在規定時間內安全地完成其預定控制任務。
近年來,容錯控制無論在理論研究還是實際應用方面都取得了較大的進展[4~6],在分類方法方面,目前比較公認的分類思想是將容錯控制分為主動容錯控制(AFTC)和被動容錯控制(PFTC)[1]。被動容錯控制在構造思路上借鑒魯棒控制的思想,通過設計一種有效的控制器,使得其對參數變化、外界干擾甚至故障不敏感,從而達到容錯的目的。其特點是對所有可能發生的故障類型事先均需已知,控制器的設計較保守,控制性能難以達到最優。主動容錯控制包含一個故障檢測與診斷(fault detection and diagnosis,FDD)子系統,能在線檢測和分離出系統發生的故障,并根據不同故障模式通過對已有控制律進行重組或重構,進而使故障發生后的系統在新的容錯控制器的支配下獲得較為滿意的控制效果。相比于被動容錯控制,主動容錯控制在性能上總體更優[5],在設計方法上更有彈性,也更有應用價值,因此,學術界也給予了更多的關注。本文重點討論主動容錯控制方法。
現存的主動容錯控制方法中,針對線性系統的研究已趨于成熟,而對非線性系統的研究正處于發展之中,成果相對有限,其困難主要在于非線性系統本身的復雜性,使得原有的對線性系統適用的建模、控制等方法均受到限制。同時主動容錯控制中的FDD與控制器調節機制對于非線性系統的故障檢測和分離具有特殊的復雜性。然而,實際對象大多是非線性的,加上線性系統發生故障后,工作點也很容易進入非線性區域,因此,研究非線性系統的容錯控制方法具有重要的理論與實際應用價值。
本文以故障發生部位為分類視角,分別從傳感器故障的容錯、執行器故障的容錯及其他部件故障的容錯三方面對非線性系統的主動容錯控制方法進行歸納和總結,重點討論了執行器故障的容錯控制問題,并探討存在的問題與未來的發展趨勢。
1 主動容錯控制的基本思想
主動容錯控制是指在故障發生時,通過FDD系統檢測出故障后,利用故障信息,通過調整控制器的參數或結構,主動實現對故障的處理,最終使得系統按期望的性能或性能略有降低安全地完成控制任務。主要包括三方面:FDD、可重構的控制器(reconfigurable controller)及控制器重組機制(controller reconfiguration mechanism)。系統結構如圖1所示。
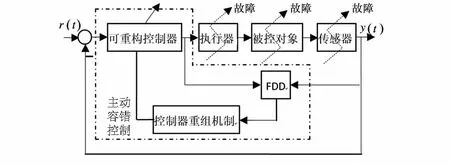
圖1 主動容錯控制結構圖Fig 1 Structure diagram of active fault tolerant control
2 針對傳感器故障的主動容錯控制方法
對傳感器故障實現容錯的思路可分為兩大類:一類是對故障傳感器本身進行重構,另一類是對控制器進行重組或重構,具體分析如下。
2.1 對故障傳感器進行重構
此類方法是基于系統中各個傳感器之間的冗余性,利用狀態估計方法或軟測量等技術以實現對故障傳感器本身的估計或重構。文獻[7]針對導彈姿態仰俯控制系統中傳感器故障問題,通過構造數值積分器和微分器實現了對故障傳感器的重構,并采用輸出反饋控制策略達到對故障的主動容錯。文獻[8]應用自適應濾波器FIR輸出替代故障傳感器信號,實現傳感器故障情形下水下機器人的容錯控制。上述文獻都是針對單傳感器故障情形。文獻[9]針對一類多變量不確定系統的多傳感器故障問題,利用加權移動平均殘差技術檢測多重傳感器故障,基于神經網絡建模技術在線重構故障傳感器信號,并將重構的傳感器信號切換到PID控制器的反饋回路,以實現對多故障傳感器的容錯。文獻[10]采用廣義系統方法對傳感器故障進行重構和補償,實現了在控制器不變情況下,故障后系統的穩定。
2.2 對控制器進行重構

3 針對執行器故障的主動容錯控制方法
執行器作為控制系統的驅動設備,直接作用于被控對象或過程,因長期頻繁地執行控制任務,是極易發生故障的部件。執行器發生故障后,不僅原來的控制律得不到執行,而且任何微小的故障都將直接快速地影響被控對象的輸出,從而影響整個控制系統的性能。
相比于傳感器故障,執行器故障處理起來更加棘手[16]。在研究方法方面,針對執行器故障的容錯控制可歸結為基于自適應重構方法、基于故障調節方法、基于多模型方法及基于智能控制方法四大類,具體分析如下。
3.1 基于自適應重構方法
該方法的總體思想是利用自適應算法重構或跟蹤系統的不確定性,采用魯棒控制、線性矩陣不等式、自適應逆最優控制等相應的控制策略,保證了故障系統在Lyapunov意義下的穩定性,從而達到容錯控制的目的。由于其靈活性和多樣性,適用范圍廣,幾乎涵蓋各種類型的故障,因此,它是研究較為廣泛的一類方法。文獻[17]基于自適應逆最優控制原理,針對衛星在軌飛行中執行機構故障情況,將系統的不確定性參數作為估計的自適應參數,通過求解自適應控制Lyapunov函數,設計了能夠保證原系統穩定的自適應逆最優控制器,并從理論上證明了控制器的穩定性。文獻[18]采用軌跡線性化方法,針對無人機的四旋翼飛行器推進器微小故障和嚴重故障,分別采用了自適應時變帶寬技術和增益再分配等方法。文獻[20,21]分別針對MISO和MIMO一類具有執行器卡死、執行器部分失效及組合故障的非線性最小相位系統,提出一種自適應容錯跟蹤控制方案。采用自適應算法估計系統的不確定性,利用神經網絡逼近執行器未知故障函數,完成了執行器組合故障狀態下的跟蹤控制。文獻[22]針對具有無窮分布時延的離散非線性系統,通過對執行器故障特征分析,提出了新的滿足故障區間概率分布的執行器故障模型,并根據Lyapunov穩定性理論和線性矩陣不等式方法,給出了故障分布依賴的均方穩定的容錯控制器解的存在條件。
3.2 基于故障調節方法
故障調節是在故障發生后,首先對系統進行故障檢測、隔離、估計等,利用故障診斷得到的故障信息,通過附加控制律等方法,以補償故障對系統造成的影響,從而達到容錯控制的目的。在此過程中,故障檢測的快速性和故障估計的準確性問題、附加控制律的設計問題是研究的重點和難點。為此,人們相繼提出了許多方法,如基于學習的方法、基于觀測器的方法等。基于觀測器方法因故障估計的準確性和對未知參數的魯棒性較好而受到更多的關注。姜斌等人在此方面做了較多的卓有成效的工作[23~25]。文獻[23]針對近空間超音飛行器(NSHV)執行器故障,基于模糊控制和滑模觀測器技術,用T-S模糊模型描述NSHV非線性特征,并對其設計了一組滑模觀測器,利用在線得到的故障估計信息,通過設計一種故障調節策略,補償了故障的影響,最后基于線性矩陣不等式技術給出了保證故障系統穩定的充分條件。文獻[24]針對執行器故障的不確定系統,用神經網絡估計了模型的不確定性,并采用故障估計算法,在故障發生后,研究了綜合且滿足H2性能要求的容錯控制器,并用滑模控制抑制神經網絡估計的誤差,同時給出了具有指定穩定度的H2控制律的充分條件。
3.3 基于多模型方法
根據被控對象的不確定范圍,用多個模型來逼近對象的全局動態特性,進而基于多個模型建立相應的控制器,通過模型(控制器)調度策略以達到快速響應外界需求的目的。多模型是一種基于分解—合成策略的控制方法,把難以用一個模型表達的復雜系統,采用多個簡單模型逼近,因此是非常適合非線性系統分析的一種方法。李煒等人[26,27]基于多模型切換技術,結合動態模型庫,采用基于RBF神經網絡和最小二乘支持向量機(LS-SVM)等方法建立各種已知故障模型或逆模型,控制策略分別采用預測控制、內模控制及逆系統等,以一種隱性的FDD策略和決策機制實現對系統的故障診斷和控制律的切換調整。但上述方法僅實現了對已知故障的容錯。針對執行器未知故障情況,文獻[28]基于數據驅動思想,分別將無模型自適應控制引入未知故障建模期間的控制,以過渡容錯策略保證了系統在線建模期間的安全。文獻[29]通過設計自適應觀測器,采用恰當的切換策略,保證了閉環信號的有界和輸出的漸近跟蹤。文獻[30]采用減法聚類和模式分類算法建立多模型集, 基于累計誤差最小的模型切換策略在線選擇最優控制模型, 并采用預測控制方法, 確保了高速動車組在動態未知故障或干擾下的安全穩定運行。上述3文獻初步試探性地解決了未知故障的容錯問題。
3.4 基于智能控制方法
該方法是研究非線性系統較為常用的一類方法,其基本思想是利用智能控制的相關理論,如,神經網絡、模糊控制等來對故障系統進行建模、故障識別、分類及容錯控制器的設計等。
神經網絡由于具有逼近任意非線性函數的特點顯示了其在解決高度非線性和嚴重不確定性系統的控制方面具有很大潛力,又因為在結構上具有功能冗余性的特點,因此,被人們引入到容錯控制器的設計上[32~34]。當然,神經網絡也有許多不完善的地方,例如:魯棒性差、結果不確定等,因此,將神經網絡與其他方法如自適應、粗糙集等技術相結合是切實可行的方法。文獻[34]針對高速列車牽引與制動系統中速度與位置控制,考慮牽引和制動的非線性及執行器故障問題,采用自適應神經網絡技術,在不需要已知系統確定的數學模型情況下,利用已知的輸入輸出數據訓練神經網絡,設計了基于數據驅動的故障容錯控制器。
模糊控制采用IF-THEN語句,適合描述一大類模型不確定系統,所建立的模型具有融合語言描述和專家知識的優點。文獻[35]采用了T-S模型對非線性進行建模,利用并行分布補償方法設計了基于觀測器的模糊容錯控制器。針對狀態不可測的多執行器同時發生時變故障情況,文獻[36]采用T-S模型對含有未知故障類型的執行器進行建模,采用滑模觀測器對故障進行檢測與分離,利用Lyapunov穩定性理論,分別針對狀態可測與不可測2種情況給出了容錯控制策略。
4 針對其他部件故障的主動容錯控制方法
這里的其他部件故障是指除了傳感器和執行器之外的控制系統的其他部分所產生的故障,如,被控對象、控制器、參考元件等出現故障,因回路設置不當而產生的故障等。相比于前兩類故障,其他部件故障研究成果相對較少[14,19,26~28,37]。在研究方法上,總體思路與上述介紹的傳感器和執行器故障情形類似。文獻[37]針對被控對象突變及初期故障,基于支持向量機的模型預測控制,利用在線支持向量機回歸技術實時訓練故障模型,在FDD檢測出故障時,采用模型預測控制,實現對在線更新的故障模型的主動容錯。
5 結束語
1)如何充分利用系統大量的在線和離線數據,研究基于數據驅動的容錯控制方法,對于非線性系統而言尤為重要,也將是未來的研究重點。
2)文獻[38,39]針對執行器故障,分別采用不同的方法,最終實現了補償執行器故障的同時優化了系統的性能,但兩文獻僅限于線性系統。在此基礎上,如何采取相應的非線性分析方法,研究適合非線性系統的復合容錯控制是值得探索的一個方向。
3)大多數主動容錯控制文獻,更多的是關注故障診斷能否診斷出故障,容錯控制能否實現容錯的問題,對二者之間的時間間隔卻很少涉及,因此,研究不同診斷方法的耗時問題,以及過渡容錯的時間問題,減少故障診斷與容錯控制之間的時延,避免由此給控制系統所帶來的高風險,對工程實踐將具有重要的指導意義。
4)生產過程的控制包括底層回路控制、過程控制、計劃調度等多個層次,各層次自身和層次之間均有出現故障的可能,目前的方法僅局限于底層和過程控制層,因此,對各個層次和層次間進行故障的容錯性設計,或將容錯控制的思想向上層擴展研究,也是具有實際意義的一個方向。
[1] Patton Ron J.Fault tolerant control systems:The 1997 situation[C]∥IFAC Symposium on Fault Detection Supervision and Safety for Technical Processes,1997:1033-1054.
[2] Jiang Jin,Yu Xiang.Fault tolerant control systems:A comparative study between active and passive approaches[J].Annual Reviews in Control,2012,36:60-72.
[3] Jiang Jin.Fault tolerant control systems—An introductory overview[J].Automatic Sinica,2005,31(1):161-174.
[4] Zhang Youmin,Jiang Jin.Bibliographical review on reconfigurable fault-tolerant control systems[J].Annual Reviews in Control,2008,32:229-252.
[5] 周東華,葉銀忠.現代故障診斷與容錯控制[M].北京:清華大學出版社,2000.
[6] Blanke Mogens,Kinnaer Michel,Lunze Jan,et al.Diagnosis and fault-tolerant control[M].2nd ed.Berlin:Springer-Verlag,2006.
[7] 曹祥宇,胡昌華,馬清亮.考慮傳感器故障的導彈姿態控制系統主動容錯控制研究[J].控制與決策,2012,27(3):379-382.
[8] 朱大奇,陳 亮,劉 乾.一種水下機器人傳感器故障診斷與容錯控制方法[J].控制與決策,2009,24(9):1335-1339.
[9] 薄翠梅,王執銓,王永華,等.一類多變量傳感器故障容錯PID控制器的設計與應用[J].東南大學學報,2006,36:43-47.
[10] Gao Z,Ding S X.Sensor fault reconstruction and sensor compensation for a class of nonlinear state-space systems via a descriptor system approach[J].IET Control Theory Appl,2007,1(3):578-585.
[11] 韓曉娜,陳朝旭,緱林峰.一類傳感器故障的主動容錯控制[J].西北大學學報:自然科學版,2010,40(1):39-42.
[12] Sourander M,Vermasvuori M,Sauter D,et al.Fault tolerant control for a dearomatisation process[J].Journal of Process Control,2009,19(7):1091-1102.
[13] Liu Ming,Shi Peng. Sensor fault estimation and tolerant control for Ito stochastic systems with a descriptor sliding mode approa-ch[J].Automatica,2013,49:1242-1250.
[14] Yetendje Alain,DonáJosé A De,Seron Maria M.Multisensor fusion fault-tolerant control[J].Automatica,2011,47:1461-1466.
[15] Hao Yang,Bin Jiang,Vincent Cocquempot.Supervisory fault-tole-rant regulation for nonlinear systems[J].Nonlinear Analysis:Real World Applications,2011,12:789-798.
[16] Hassan Noura,Didier Theilliol.Fault-tolerant control systems[M].London:Springer-Verlag Limited,2009.
[17] 李 廣,王 青,董朝陽.基于自適應逆最優控制的衛星容錯控制[J].南京航空航天大學學報,2011,43(8):79-82.
[18] Jiang Hao,Yu Yushu,Ding Xilun.A fault tolerant control strategy for quadrotor UAVs based on trajectory linearization approa-ch[C]∥Proceedings of 2012 IEEE International Conference on Mechatronics and Automation,Chengdu,China:1174-1179.
[19] Fan Lingling,Song Yongduan.Fault-tolerant control and distur-bance attenuation of a class of nonlinear systems with actuator and component failures[J].ACTA Automatica Sinica,2011,37(5):623-628.
[20] 張紹杰,劉春生,胡壽松.一類MISO最小相位系統的執行器故障自適應容錯控制[J].控制與決策,2010,25(7):1084-1087.
[21] 張紹杰,劉春生,胡壽松.多輸入多輸出最小相位系統的執行器故障自適應容錯控制[J].控制理論與應用,2010,27(9):1190-1194.
[22] 杜黎龍,張建華,顧 洲.具有無窮分布時延的非線性離散系統容錯控制[J].系統工程與電子技術,2012,34(2):358-363.
[23] Xu Yufei,Jiang Bin,Tao Gang,et al.Fault accommodation for near space hypersonic vehicle with actuator fault[J].International Journal of Innovative Computing,Information and Control,2011,7(5):2187-2200.
[24] 劉春生,姜 斌.一類非線性系統的H2容錯控制器的設計及其在空間飛行器的應用[J].自動化學報,2013,39(2):188-196.
[25] Qian Moshu,Jiang Bin,Xu Dezhi.Fault tolerant tracking control scheme for UAV using dynamic surface control technique[J].Circuits,Systems and Signal Processing,2012,31(5):1713-1729.
[26] 李 煒,許德智,李二超.基于RBF網絡的逆系統多模型內模主動容錯控制[J].華中科技大學學報,2009,37(1):98-101.
[27] 李 煒,王鳳達,馬 克.基于LS-SVM的多模型非線性主動預測容錯控制[J].蘭州理工大學學報,2009,35(2):70-75.
[28] 李 煒,程應峰,許德智.數據驅動逆系統方法的多模型主動容錯控制[J].計算機測量與控制,2011,19(6):1357-1363.
[29] Guo Yuying,Zhang Youmin.Multi-model based adaptive reconfiguration control for flight control systems with actuator faults[C]∥2011 Chinese Control and Decision Conference,2011:1335-1340.
[30] 楊 輝,張坤鵬,王 昕.高速動車組多模型切換主動容錯預測控制[J].控制理論與應用,2012,29(9):1211-1214.
[31] Guo Yuying,Jiang Bin.Multiple model-based adaptive reconfiguration control for actuator fault[J].ACTA Automatica Sinica,2009,35(11):1452-1458.
[32] Bahi Jacques M,Contassot-Vivier Sylvain,Sauget Marc,et al.A parallel incremental learning algorithm for neural networks with fault tolerance[J].Lecture Notes in Computer Science,2008,5336:174-187.
[33] Zakwan Skaf,Wang Hong,Guo Lei.Fault tolerant control based on stochastic distribution via RBF neural networks[J].Journal of Systems Engineering and Electronics,2011,22(1):63-69.
[34] Song Q,Song Y D.Data-based fault-tolerant control of high-speed trains with traction/braking notch nonlinearities and actuator fai-lures[J].IEEE Transactions on Neural Networks,2011,22(12):2250-2261.
[35] 王鐵超,佟紹成.一類不確定非線性系統的執行器故障模糊容錯控制[J].模糊系統與數學,2011,25(2):93-105.
[36] Shen Q,Jiang B,Cocquempot V.Fuzzy logic system-based adaptive fault-tolerant control for near-space vehicle attitude dynamics with actuator faults[J].IEEE Transactions on Fuzzy Systems,2013,21(2):289-300.
[37] Rodil Sergio Saludes,Fuente M J.Fault tolerance in the framework of support vector machines based model predictive control[J].Engineering Applications of Artificial Intelligence,2010,23:1127-1139.
[38] 金小崢,楊光紅,常曉恒,等.容錯控制系統魯棒H∞和自適應補償設計[J].自動化學報,2013,39(1):31-42.
[39] Yu Xiang,Jiang Jin.Hybrid fault-tolerant flight control system design against partial actuator failures[J].IEEE Transactions on Control Systems Technology,2012,20(4):871-886.
Review of active fault tolerant control for nonlinear system*
MAO Hai-jie, LI Wei, FENG Xiao-lin
(College of Electrical and Information Engineering,Lanzhou University of Technology,Lanzhou 730050,China)
A review on active fault tolerant control(AFTC)for nonlinear systems is presented from fault location point of view, the different kinds of AFTC methods in the nearly 5 years from three aspects,which are sensor faults, actuator faults and other components faults are investigated,especially for actuator faults in detail,and existing problems, and the development trend in the future are discussed.
active fault tolerant control(AFTC); nonlinear system; fault diagnosis
2013—09—04
國家自然科學基金資助項目(61364011,61370037,61263047); 甘肅省自然科學基金資助項目(1310RJYA019)
TP 273
A
1000—9787(2014)04—0006—04
毛海杰(1978-),女,內蒙古赤峰人,博士研究生,講師,主要研究方向為動態系統故障診斷與容錯控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(2015年6期)2015-04-17 03:31:50
