一種對稱式直線加減速方法*
2014-07-18 11:56:18黃昭縣王志成
組合機床與自動化加工技術 2014年4期
關鍵詞:方法
黃昭縣,王志成
(1.中國科學院大學,北京 100049;2.中國科學院 沈陽計算技術研究所, 沈陽 110168;3.沈陽高精數控技術有限公司,沈陽 110168)
一種對稱式直線加減速方法*
黃昭縣1,2,王志成2,3
(1.中國科學院大學,北京 100049;2.中國科學院 沈陽計算技術研究所, 沈陽 110168;3.沈陽高精數控技術有限公司,沈陽 110168)
在高速高精加工中,定位時間和定位精度是衡量數控系統性能的兩項重要指標。論文分析了傳統直線加減速中定位時間較長的原因,在此基礎上提出了采用對稱思想使減速段與加速段嚴格對稱的改進方法,并進行了仿真和實驗。結果表明在保證精度的前提下,采用該方法可以縮短定位時間,能夠提高定位效率。
直線加減速;高速;高精;伺服定位
0 引言
在數控加工過程中,為了使機床快速、準確地運行到給定位置,需要對電機的啟停、軌跡轉接等進行速度控制,對運動路徑進行軌跡規劃,使電機的轉動平穩[1]。常見的加減速控制方法有:直線加減速、指數加減速、S形加減速、三角函數加減速等,其中直線加減速因在給定位置、速度、加速度的條件下定位時間最優而得到廣泛應用[2]。
理想直線加減速控制過程可分為加速段、勻速段和減速段三個階段。實際應用中,為了避免被控對象到達目標位置后仍有較大速度產生沖擊,而使減速點提前。為了使被控對象能夠到達目標位置,引入低速定位階段。在高速運動中,低速定位階段運行時間可能比較長,這樣就造成了定位時間長的問題。文獻[3-4]中采用減速段誤差補償的技術使低速定位縮短甚至消除,但它的前提是加速段向勻速段過渡時,速度剛好達到最大速度。然而實際控制中,由于加速度的不連續性,速度往往在達到最大速度的轉折點處產生超調,仍然會出現低速定位階段。為了解決這一問題,本文采用對稱的思想,利用加速段軌跡規劃比較理想這一特點,使減速段與加速段嚴格對稱,以消除低速定位段,減少定位時間并保證定位精度。
1 直線加減速簡介
1.1 直線加減速的原理
直線加減速控制算法標準運動過程中有三個階段:加速段、勻速段、減速段,如圖1所示,形狀似梯形,所以又叫梯形加減速控制算法。第一階段—加速段,由初始速度以恒定的加速度向最大速度遞增;第二階段—勻速段,以恒定的速度運動;第三階段—減速段,以恒定的加速度減速到初始速度,被控對象剛好到達目標位置。
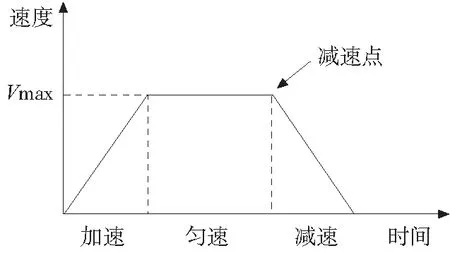
圖1 標準直線加減速
1.2 直線加減速的實現思想
加減速控制的實現方法與位置伺服系統采用的何種插補算法有關,常用的插補算法有脈沖增量插補和數據采樣插補[8]。本文采用的是基于數據采樣插補的加減速控制,它將整個運動過程分割成時間相等的時間間隔即插補周期。插補周期不變,插補步長隨著進給速度的變化而變化。速度越大,插補步長越大;速度越小,插補步長越小。
在伺服驅動器位置環控制模式下,給定目標位置、加速度和最大速度后,加減速控制算法在插補周期中斷到來之前計算出當前周期的位置增量,然后加上前一個周期的位置給定得到當前周期的位置給定,底層位置環周期的刷新位置指令來驅動電機運動[3]。每個插補周期內插補步長即位置增量體現了速度的大小,插補步長越大,速度越大;插補步長越小,速度越小。
通過這種遞推的方式,位置指令向目標位置遞增或遞減,最終到達目標位置。定位完成時,位置增量為零,速度理論上也應為零。
易知整個加減速控制實現的關鍵點在于位置增量即插補步長的準確計算。位置增量的計算有多種方法,經常采用的是簡單直觀的面積計算法[3]。在直線加減速控制算法中,加速度是恒定的,即Vk=Vk-1+Vacc;位置增量等于平均速度與插補周期之積,即ΔS= (Vk+Vk-1)/2*Δt,位置增量的計算問題轉變成了速度Vk的刷新問題,已知插補周期兩端的速度即可求得插補步長。
2 減速點的確定及問題分析
2.1 直線加減速中減速點的確定
直線加減速控制的三個階段中,Vk相對Vk-1的變化規律是不同的。欲正確計算每個插補周期的位置增量,首先要判斷當前運動處于哪個階段,那么須預知各個階段切換點的信息。伺服系統由勻速段進入減速段或由加速段直接進入減速段的位置稱為減速點。減速段對伺服定位精度有重要影響,在軌跡規劃插補算法中,必須要預測減速點的位置,以確定何時進入減速段。
通常確定減速點的方法有兩種,一種利用進給速度、減速時間和減速時加速度等運動參數計算減速點[4]。設伺服系統的最大速度為Vmax,加速度為Vacc,減速段長度為Sd,則由直線加減速規律可計算減速區長度
(1)
v(t)=vmax-vacct
(2)
解方程(1),(2)得
(3)
另一種方法根據在啟動和停止時的加減速規律相同,利用對稱性來確定減速點。設整個運動長度為S,加速段所走長度為Sc,得
Sd=S-Sc
(4)
由于實時性的要求,加減速控制算法運算時間不宜太長,故而在本文中采用后一種方法,降低直線加減速的時間復雜度。
2.2 減速點確定中存在的問題
由于采樣插補控制過程實質上是將預加工軌跡按時間間隔(插補周期)離散為一系列控制點作為控制過程中的目標點[4,7]。對于這樣的離散控制方式,由采樣周期帶來的量化誤差是不可避免的。在直線加減速中,影響減速點確定的因素主要有兩方面:
一方面,在勻速段中,以最大速度Vmax進給,不能保證經過整數個插補周期恰好到達理論減速點。
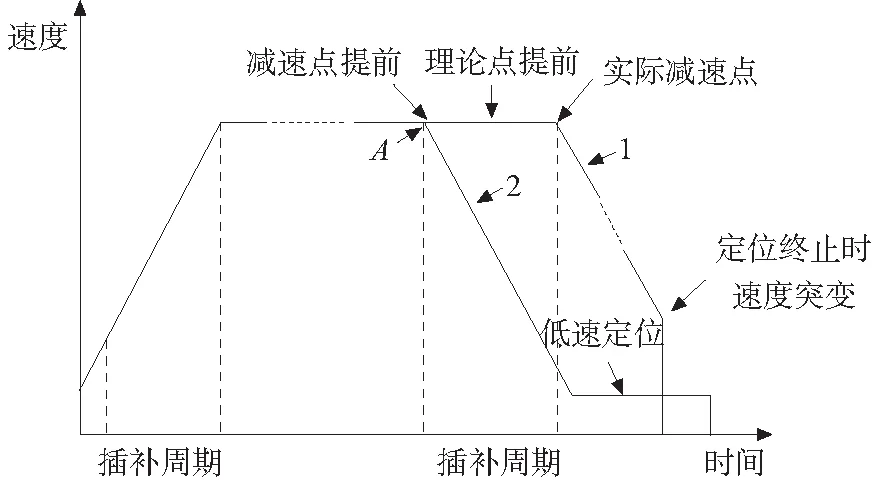
圖2 實際減速點與理論減速點不重合
如圖2所示,當被控對象運動到位置A時,當前位置加上勻速段插補步長將會超過理論減速點位置,使實際減速點滯后。這樣減速段所走的位置小于加速段所走的位置,按預期減速規律將會導致被控對象定位終止時,仍有較大速度,如曲線1所示。若強行停止勢必造成沖擊,影響定位精度和平穩性。
為了避免這種情況,通常使實際減速點提前到位置A,如曲線2所示。這樣將導致速度降為零時電機還未到達目標位置。為了使電機準確定位,必須有一個低速定位階段,這將導致定位時間延長。
另一方面,在加速段中,速度以恒定加速度Vacc遞增,不能保證經過整數個插補周期速度恰好達到最大速度Vmax。
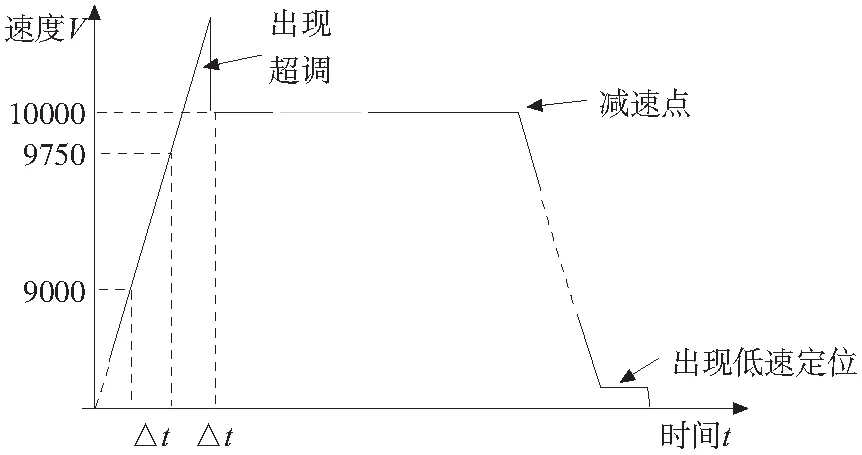
圖3 加速段速度超調導致低速定位
如圖3所示,加速度Vacc= 750,最大速度Vmax= 10000。當Vk= 9750時,Vk+Vacc=10500,出現速度超調。由位置增量計算公式可知,加速段最后一個插補周期的插補步長要大于理想情況下的插補步長,導致加速段位置量比理想情況下稍大。由公式(4)可知,這種情況將導致減速點位置判斷提前,速度減為零時,被控對象仍然沒有達到目標位置,會有一個低速定位過程。在加速度較大時,這種現象尤為明顯,低速定位過程有可能比較長,使整個定位時間延長。
3 對稱式直線加減速方法
由上述分析可知,減速點判斷的準確與否直接影響定位精度和定位時間。為了保證定位精度,引入的低速定位段又延長了定位時間,很難使精度與時間相協調。本文采用對稱的思想,使減速段與加速段嚴格對稱,即減速段每個插補周期的插補步長與加速段一一對應,這樣保證了定位終止時速度剛好為初始值的理想狀態。
為了實現這種對稱式的直線加減速控制方法,對傳統的直線加減速做了兩方面的改進:
一方面,提高判斷減速點的位置的準確性。針對理論減速點與實際減速點不重合的情況(見圖2),我們增加一個預減速點,如圖4所示:當到達預減速點后,如果當前位置加上勻速段插補步長超過理論減速點位置,就調整插補步長使被控對象剛好到達理論減速點。
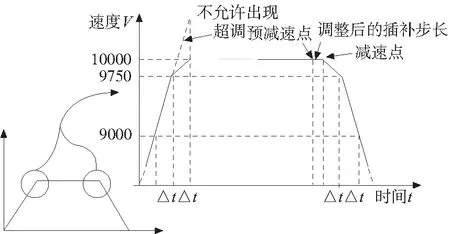
圖4 減速段與加速段嚴格對稱示意圖
4 實驗與結果分析
為了檢驗對稱式直線加減速方法控制效果,使之與傳統方法進行實驗仿真對比。所采用的運動參數如表1,默認插補周期設定為1ms,初速度為1000 pulse/s,起始位置坐標為0。

表1 運動參數
針對勻速段中不能準確判斷減速點導致定位誤差,采用第一組運動參數,運行結果如圖5所示。傳統的直線加減速控制中,使實際減速點比理論減速點提前,在減速段后有一段較長的低速定位階段。改進后的算法對到達預減速點后的插補步長作出調整,消除了低速定位,縮短了定位時間由原來的100個插補周期縮短為80個插補周期。

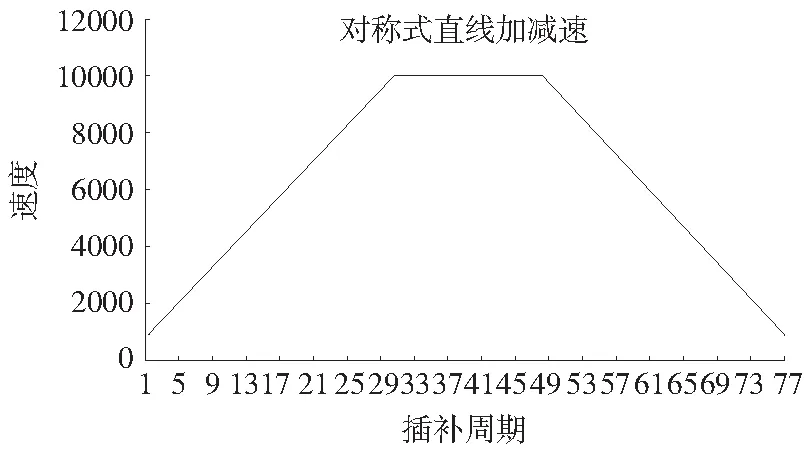
圖5 減速點判斷誤差對比圖
針對加速段中在速度向最大速度過渡時存在超調的可能,采用第二組運動參數,運行結果如圖6所示。傳統的直線加減速控制出現了較長的低速定位階段,整個運動過程用了70個插補周期。采用改進后的算法,避免了速度超調,使減速段與加速段嚴格對稱,消除了低速定位階段,縮短了定位時間,由原來的70個插補周期縮短到了60個插補周期,提高了定位效率。

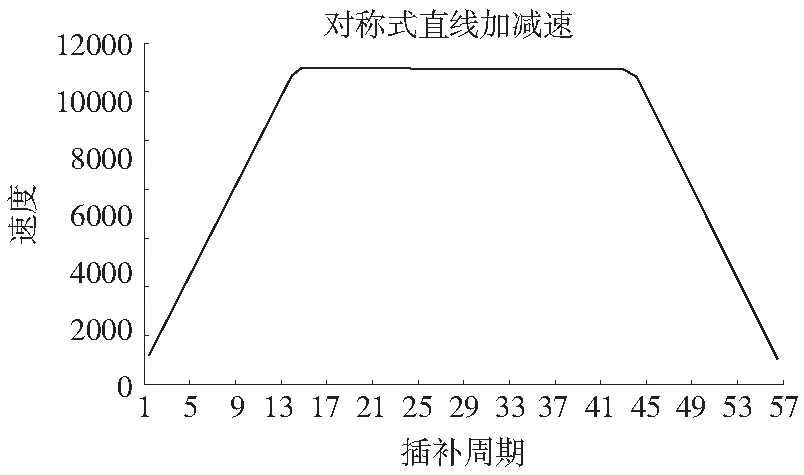
圖6 加速段速度超調對比圖
5 結論
(1)研究的對稱式直線加減速方法消除了低速定位段,縮短了定位時間,提高了定位效率。
(2)S形加減速在理想情況下,減速段與加速段也完全對稱,所以上述改進方法同樣適用于S形加減速。
(3) 研究中提到的對稱思想為變速變加速運動模式的加減速控制中減速點的判斷提供了解決思路。
[1]黃兆斌,黃云龍,余世明.幾種步進電機加減速方法的研究與應用[J].機電工程.2011,28(8):951-953,974.
[2]陳蘇, 胡金高. 高性能伺服控制器算法的研究[J]. 伺服控制. 2010(8) :41-43.
[3]楊凱峰.單軸運動控制器的設計[D]. 武漢:華中科技大學,2008.
[4]郭新貴.采用線性加減速伺服系統的快速準確定位方法[J].機械工程學報.2003(7):74-79.
[5]陳友東.數控系統的直線和S形加減速離散算法[J].中國機械工程.2010(3):567-568.
[6]王曉明.電動機的DSP控制[M].北京:北京航空航天大學出版社,2009.
[7]林榮華.新型運動控制器及其核心算法設計與實現[D].廣州:華南理工大學,2012.
[8]向樂萍.高速CNC變速變加速算法研究與實現[D].廣州:華南理工大學,2012.
[9]于金剛.一種新型的Jerk連續加減速控制方法研究[J].組合機床與自動化加工技術.2009(8):61-64,67.
[10]盧勇.數控系統往復運動控制的研究.[D].廣州:華南理工大學,2012.
(編輯 趙蓉)
A Symmetrical Linear Acceleration and Deceleration Control Method
HUANG Zhao-xian1,2,WANG Zhi-cheng2,3
(1.University of Chinese Academy of Sciences ,Beijing 100049,China; 2.Shenyang Institute of Computing Technology of Chinese Academy of Sciences, Shenyang 110168,China)
In high-speed and high-precision processing industry, the positioning time and positioning accuracy are the most important indicators in measured the performance of CNC machine tools .The reasons of positioning time longer in the traditional linear acceleration and deceleration control is analyzed.On this basis,it puts forward an improved linear acceleration and deceleration control methods whose deceleration and acceleration segments are strictly symmetrical and carries out simulation and experiment.The results show that this method can shorten the positioned time and improve the positioning efficiency under the premise of ensuring accuracy.
linear acceleration and deceleration; high-speed; high-precision; servo positioning
1001-2265(2014)04-0068-03
10.13462/j.cnki.mmtamt.2014.04.018
2013-08-10
"高檔數控機床與基礎制造裝備"國家科技重大專項、高檔數控系統在航空領域的示范應用(2013ZX04012-021)
黃昭縣(1987—),男,濟南人,中國科學院大學、中科院沈陽計算技術研究所碩士研究生,研究方向為嵌入式與數控技術,(E-mail)huang9168@126.com。
TH166;TG65
A
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56