基于轉矩滯環結構優化的零電壓矢量作用分析*
2014-07-18 11:56:20崔皆凡王鴻雪
組合機床與自動化加工技術 2014年4期
關鍵詞:系統
崔皆凡,王鴻雪,秦 超
(沈陽工業大學 電氣工程學院,沈陽 110870)
基于轉矩滯環結構優化的零電壓矢量作用分析*
崔皆凡,王鴻雪,秦 超
(沈陽工業大學 電氣工程學院,沈陽 110870)
為了提高永磁同步電機直接轉矩控制在高速加工中心、精密磨床等場合的控制性能,從零電壓矢量的作用原理入手,深入的分析了永磁同步電機直接轉矩控制系統中零電壓矢量的作用以及轉矩滯環比較器結構的改變對轉矩波動的影響。與傳統轉矩滯環比較器相比,采用滯環寬度優化的轉矩滯環比較器,通過合理添加零電壓矢量,使轉矩波動明顯減小。利用Matlab仿真平臺,證明了轉矩滯環寬度相同時,系統速度越低轉矩波動越小。在系統速度相同時,轉矩滯環比較器滯環寬度越大轉矩波動越小。
永磁同步電機;直接轉矩控制;零電壓矢量;轉矩滯環比較器
0 引言
直接轉矩控制方法控制簡單,轉矩響應快,動態性能好。鑒于直接轉矩控制在異步電機上的優異表現,一些學者致力于在同步電動機上的應用這種控制方式。因此永磁同步電機直接轉矩控制就逐漸被廣泛應用在高速加工中心、精密磨床等場合。很多人致力于改進永磁同步電機直接轉矩控制系統的各項性能。而如何減小永磁同步電機直接轉矩控制系統中的轉矩波動問題更是成為熱點之一[1-3]。在是否應該使用零電壓矢量的問題上,文獻[4]提出,永磁同步電機不同于感應電機,定轉子磁鏈間沒有轉差,因此早期的直接轉矩控制方式明確指出在永磁同步電機的直接轉矩控制中,不能使用零電壓矢量。而文獻[5]指出零電壓矢量在永磁同步電機直接轉矩控制系統中有保持轉矩的作用,提倡使用零電壓矢量。文獻[6]認為,當永磁同步電機直接轉矩控制系統處于制動狀態時,施加零電壓矢量會引起系統失控,提出要合理謹慎的使用零電壓矢量。文獻[7]認為,零電壓矢量實際上是起到減小轉矩的作用。而文獻[8]認為零電壓矢量有保持轉矩不變的功能,從而可有效抑制磁鏈、轉矩等波動。以上文獻都沒有站在轉矩滯環比較器結構的角度探討零電壓矢量的應用問題。在直接轉矩控制中,零電壓矢量的添加與轉矩滯環比較器的結構有著一一對應的關系。所以本文在永磁同步電機直接轉矩控制系統中,在轉矩滯環比較器結構優化的基礎之上對零電壓矢量的作用展開深入的研究。
1 轉矩波動的產生原理
由文獻[8]可知,面裝式永磁同步電機直接轉矩控制中轉矩的公式為:
(1)
式中:Ld為d軸電感;ψf為永磁體磁鏈,ψs為定子全磁鏈,p為極對數,Te為電磁轉矩,δ為功角,是定子磁鏈和永磁體磁鏈之間的夾角。
由式(1)對時間t求導,可知在極微小的Δt時間內,轉矩的增量是由功角的增量所引起的。
(2)
仔細研究式(2),發現功角的增量有如式(3)、(4)、(5)的關系:
Δδs=ωsΔt
(3)
Δδr=ωrΔt
(4)
Δδ=Δδs-Δδr
(5)
功角的增量Δδ就是定子磁鏈在Δt時間內的角度增量Δδs和永磁體磁鏈在Δt時間內的角度的增量Δδr的差值,ωs、ωr分別是定子和轉子的角速度。若忽略定子電阻,則可以用式(6)、(7)得到Δδs。us為Δt時間內,要實現定子磁鏈變化的預期電壓矢量。
Δψs=usΔt
(6)
(7)
同時可以由式(8)得到Δδr。
Δδr=ωrΔt
(8)
(9)
當零電壓矢量作用時,us=0,那么Δδs=0,所以得到:
Δδ=-Δδr=-ωrΔt
(10)
那么在零電壓矢量作用期間功角的增量就只與轉子的角速度和Δt的乘積有關,速度與Δt的乘積較小,轉矩波動就相對小。
2 滯環結構與零電壓矢量添加方式
根據直接轉矩控制系統中轉矩滯環比較器的作用原理,可用一個平面直角坐標系來表示滯環比較器的結構。以給定轉矩和實際轉矩的差值ΔTe為自變量X,縱坐標為滯環比較器的輸出值Y,當Y= 1時,系統需要使用有效電壓矢量增大轉矩,當Y= -1時系統需要使用有效電壓矢量減小轉矩,當Y= 0時系統需要使用零電壓矢量保持轉矩。
不同的轉矩滯環比較器的結構,零電壓矢量的添加方式就有很大的不同,傳統的滯環比較器如圖1所示。

圖1 傳統轉矩滯環比較器
傳統滯環比較器的作用過程是這樣的,隨著X值不斷減小,從X> 1的位置一直減小到X= 0的位置,Y= 1。隨著X繼續減小從X= 0到X= -1的過程中Y= 0,就是使用了零電壓矢量。同理從X< -1的位置一直增大到X= 0的位置,Y= -1。隨著X繼續增大從X= 0到X= 1的過程中Y= 0,就是使用了零電壓矢量。
改進的轉矩滯環比較器的結構如圖2、3、4所示,按照滯環寬度由寬到窄依次標注A型、B型、C型。
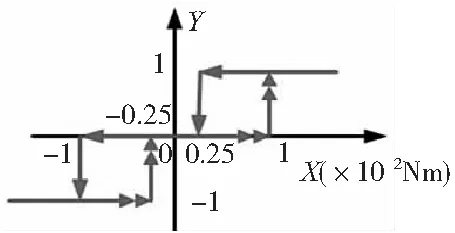
圖2 A型滯環比較器結構
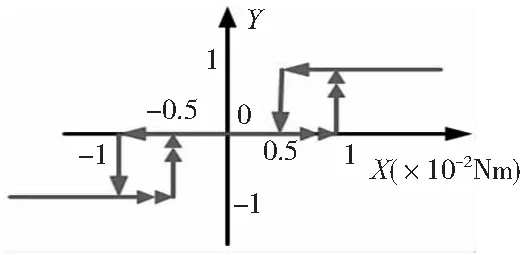
圖3 B型滯環比較器結構
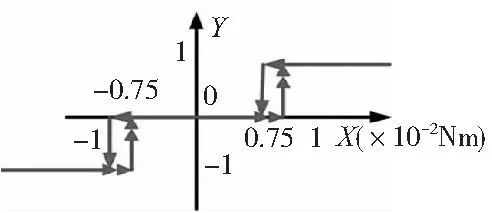
圖4 C型滯環比較器結構
以A型為例說明零電壓矢量添加過程。從X>1減小到X=0.25的過程中,Y=1;從X= 0.25減小到X= -1的過程中,系統一直使用零電壓矢量。從X<-1到X=-0.25的過程,Y= -1;從X= -0.25增大到X= 1的過程中系統一直使用零電壓矢量。與A型轉矩滯環比較器不同,B型和C型轉矩滯環比較器的輸出跳變點分別設置在X=±0.5和X=±0.75處。在每個控制周期中,A型、B型、C型三種轉矩滯環比較器的滯環寬度依次由寬到窄,相應依次增加了零電壓矢量作用時間即:ΔtA<ΔtB<ΔtC。
3 滯環寬度的優化對轉矩波動的影響
在Matlab/Simulink仿真中采用永磁同步電機參數為:定子電阻Rs=4.2Ω,直、交軸等效Ld=Lq=0.026H,轉子磁鏈ψf=0.175Wb,轉動慣量J=0.0008kg·m2,粘滯系數B=0,極對數p=2。
分析了當系統給定轉速分別是190r/min、760r/min、1430r/min時的轉矩波動,同一轉速下分別采用了A、B、C三種類型滯環比較器,得出仿真結果如圖5、6、7所示。
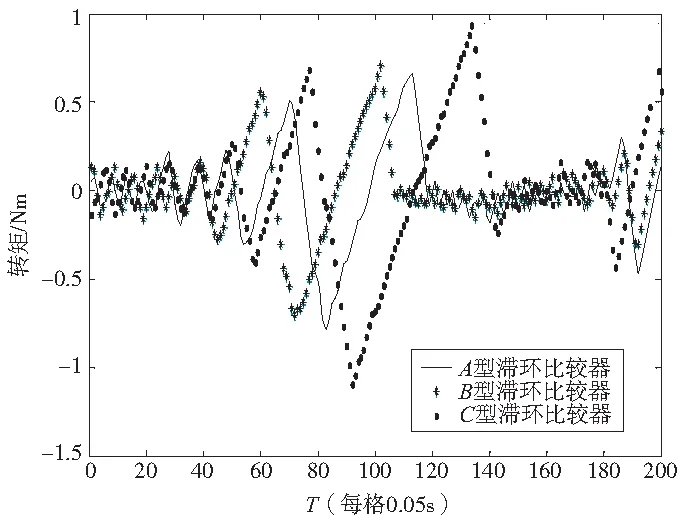
圖5 轉速190 r/min時的轉矩波動
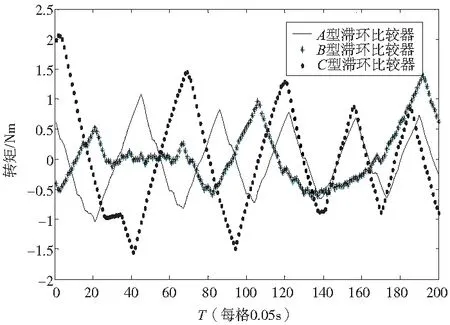
圖6 轉速760 r/min時的轉矩波動
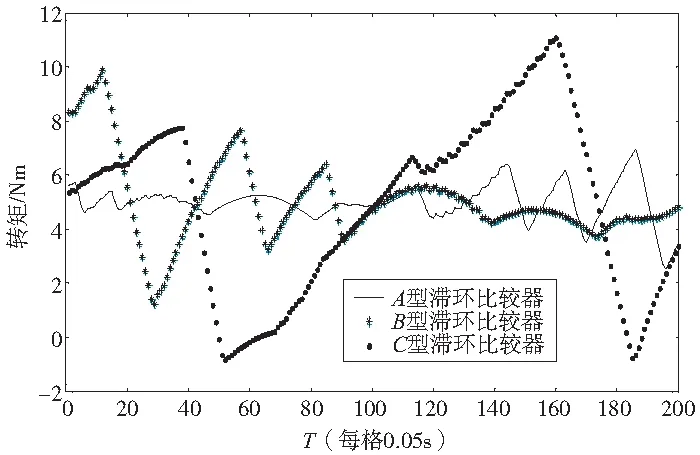
圖7 轉速1430 r/min時的轉矩波動
三種轉矩滯環比較器結構不同,轉矩滯環寬度不同,在每一個控制周期內零電壓矢量作用的時間也不同,由短到長依次是ΔtA<ΔtB<ΔtC。在零電壓矢量作用中,轉矩的波動只與功角的增量Δδ=-Δδr=-ωrΔt有關,由圖5、6、7可知,在相同的給定速度下隨著轉矩滯環比較器的滯環寬度的增大,轉矩的波動逐漸減小,通過圖5可以看到在相對低速下,轉矩波動甚至有一段時間接近于零,比較圖5、6、7發現相同的滯環寬度下,隨著系統速度的降低,轉矩波動的情況得到有效的抑制。系統速度相同時,轉矩滯環比較器滯環寬度越大,轉矩波動越小。表1為給定轉速分別是190r/min、760r/min、1430r/min時的轉矩波動,系統在同一轉速條件下分別采用了A、B、C三種類型滯環比較器和傳統型轉矩滯環比較器。在相同的轉速條件下,三種改進型滯環比較器A型、B型、C型的轉矩波動都要比傳統的滯環比較器的轉矩波動小。在此三種改進型滯環器中相同轉速條件下,滯環寬度越大轉矩波動越小。對于所有類型的轉矩滯環比較器來說,滯環寬度相同,轉速越低,系統轉矩波動越小。

表1 轉矩滯環比較器在三種速度條件下的轉矩波動表
4 結論
在永磁同步電機直接轉矩系統中,要采用滯環寬度優化的轉矩滯環比較器,選擇合適的零電壓矢量,使系統轉矩波動明顯減小。當系統速度相同時,轉矩滯環比較器滯環寬度越大轉矩波動越小;滯環寬度相同時,轉速越低轉矩波動越小。因此,在永磁同步電機直接轉矩控制系統中,應選擇相對低的系統運行速度,滯環寬度較大的變結構轉矩滯環比較器,利用零電壓矢量,可以更有效減小其轉矩波動。
[1] 王兵,潘玉田,劉剛.異步電機直接轉矩控制脈動抑制測量[J].組合機床與自動化加工技術,2009(12):66-68.
[2] 楊玉巍,田夢君,黃玉強..基于三點式轉矩調節的交流電機直接轉矩控制系統仿真研究[J].組合機床與自動化加工技術,2006(1):41-44.
[3] 孫軍,劉偉,田龍等.基于SIMULINK的伺服進給系統仿真模型與分析[J].組合機床與自動化加工技術.2013(3):80-83.
[4]TaylorD.Nonlinearcontrolofelectricmachines:anoverview[J].IEEETrans,onControlSystemsMagazine, 1994, 14(6) 41-51.
[5] 田淳,胡育文.永磁同步電機直接轉矩控制系統理論及控制方案的研究[J].電工技術學報,2002,17(1):7-11.
[6] 李耀華,劉衛國.零電壓矢量在PMSM直接轉矩控制系統中的應用[J].電力電子技術,2010,44(9):50-51.
[7] 王瑩,胡育文,楊建飛.零矢量在永磁同步電機直接轉矩控制中的作用及仿真研究[J].微電機,2011, 44(5) :48-51.
[8] 賈洪平,賀益康.永磁同步電機直接轉矩控制中零矢量的作用研究[J].電氣傳動2006,36(4):13-16.
[9] 朱國昕.基于SVPWM的永磁同步電動機直接轉矩控制[J].變頻器世界,2012(5):64-66.
[10] 趙宏革,朱景偉,樊印海.直接轉矩控制系統零電壓矢量的調節作用[J].大連海事大學學報,2010,36(2):71-74.
[11] 盧達,趙光宙,李楠.包含零矢量的永磁同步電機直接轉矩控制[J].電機與控制學報,2010,14(9): 1-6.
(編輯 趙蓉)
The Function Analysis of Zero Voltage Vector Based on the Structure of the Torque Hysteresis in Optimizing
CUI Jie-fan,WANG Hong-xue,QIN Chao
(School of Electrical Engineering,Shenyang University of Technology,Shenyang 110870,China.)
In order to improve the performance of permanent magnet synchronous motor direct torque control such as high speed machining center and precision grinder, from the principle of zero voltage vector function, it analyzes the role of zero voltage vector in the Permanent magnet synchronous motor control system and the impact on Torque hysteresis comparator structure of rotating torque fluctuations deeply. Compared with the traditional torque hysteresis comparator, the hysteresis width optimized torque hysteresis comparator reduces torque ripple obviously, by adding zero voltage vectors reasonably. Using the Matlab simulation platform, it proves that under the condition of the same width of hysteresis the smaller the system speeds the smaller the torque ripples, and under the condition of the same system speed the greater the hysteresis width, the smaller the torque ripple.
permanent magnet synchronous motor; direct torque control; zero voltage vector; torque hysteresis
1001-2265(2014)04-0038-03
10.13462/j.cnki.mmtamt.2014.04.010
2013-09-16
遼寧省科技廳資助基金項目(201202167)
崔皆凡(1963—),女,沈陽人,沈陽工業大學教授,博士,主要從事特種電機及其控制的研究,(E-mail)747906006@qq.com。
TH16;TG65
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32