基于ADAMS平臺的鏈傳動建模方法及仿真研究
2014-07-08 02:15:48李增雙
機械工程師 2014年9期
關鍵詞:模型
李增雙
(湖南華菱鋼鐵股份有限公司,湖南 湘潭 411101)
0 引 言
與帶傳動、齒輪傳動相比,鏈傳動具有傳動比準確且傳動效率高等特點[1],因為其本身存在多邊形效應,造成較大的動載荷,所以在嚙合瞬間會對鏈節較大沖擊,引發鏈條橫向振動,造成磨損和跳齒等。鑒于鏈傳動本身的動力學特性,研究鏈傳動中鏈條的橫向振動,對于解決鏈傳動的穩定性、失效等問題有重要意義。本文通過虛擬樣機技術[2],建立鏈傳動的多剛體多力學模型,模擬鏈傳動過程中工作環境及受力特點,提出了鏈節與鏈節之間柔性鉸約束模型和鏈節與鏈輪之間接觸模型,運用ADAMS命令流建立了鏈傳動虛擬樣機模型,并驗證了建模的準確性,對鏈傳動的振動和沖擊等問題起到很好預測作用。
1 鏈傳動的設計與計算
本文依據設計需求,采用傳動比i=1,雙鏈輪的傳動方式,選擇型號為選用08B 鏈節。它是由內鏈板、外鏈板、銷軸、套筒和滾子組成[3],如圖1(a)所示。鏈輪中分度圓d、齒頂圓da、齒根圓df、齒側凸緣直徑dg等依據《機械設計手冊》相關公式可算出,取中心距a=533 mm,如圖1(b)所示。
2 鏈傳動多體動力學建模
針對ADAMS 對大變形柔性體建模的復雜性,本文采用命令流的方式完成鏈傳動系統的裝配、柔性鉸約束的添加,鏈節與鏈輪接觸約束的添加等操作,具有快速、準確等特點。
2.1 鏈節與鏈節之間建模
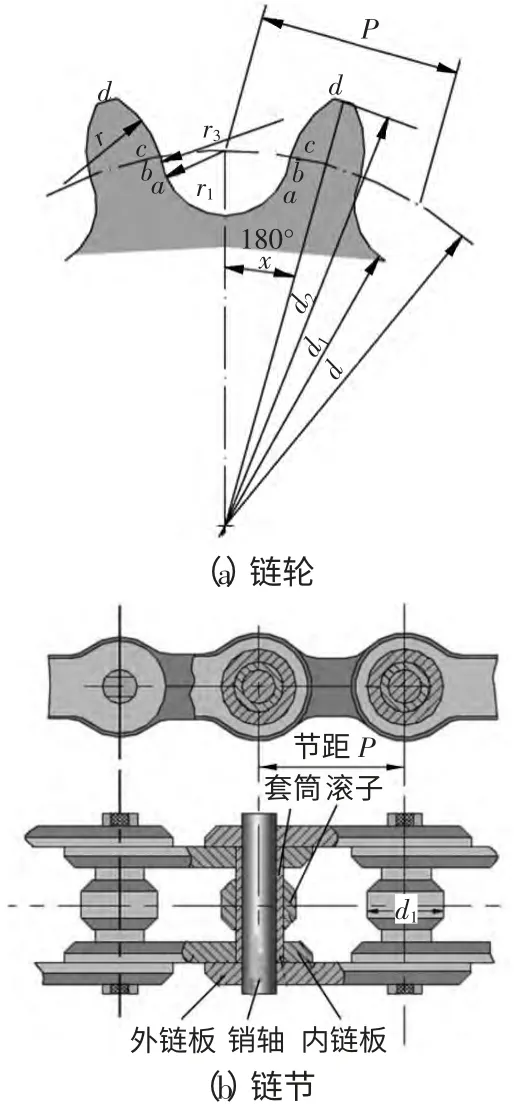
圖1 鏈輪與鏈節設計參數圖
鑒于目前鏈傳動的動力學模型有以下4 種[4]:勻質彈性帶模型、集中質量彈簧模型、變質量彈性帶模型和集中質量間隙彈簧模型。勻質與變質量彈性帶模型只考慮到鏈條的連續性,忽略了鏈節之間的間隙及發生的碰撞;另外兩種屬于離散多剛體模型,但忽略了鉸接處的微小位移。考慮到兩個鏈節之間具有相互轉動、橫向位移以及縱向線位移的特性,本文提出了采用軸套約束來模擬兩鏈節之間的約束。軸套力通過定義力和力矩的6 個分量(FXFYFZTXTYTZ)在兩個構件之間添加一種相互作用力[5],如圖2 所示。軸套力計算公式如下所示:
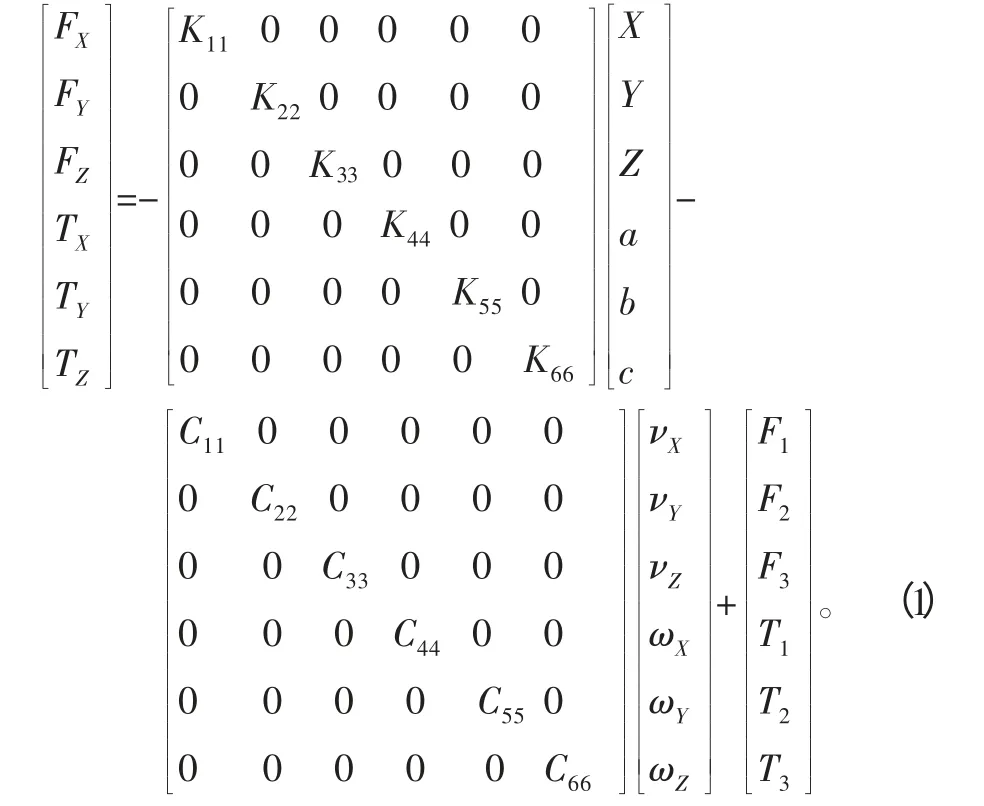
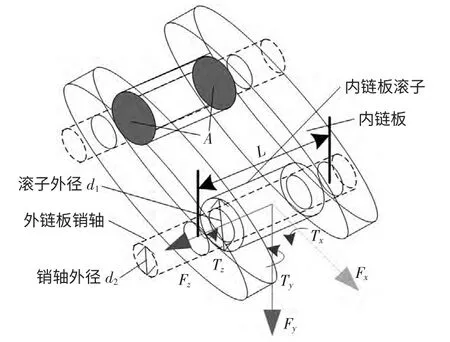
圖2 鏈節受力示意圖
式中:K 為剛度;C 為阻尼;X、Y、Z、a、b、c 為變形量;vX、vY、vZ、ωX、ωY、ωZ為分量速度;F1、F2、F3、T1、T2、T3為預載荷。
式(2)中:K 為碰撞剛度;g 為切入深度;dmax為最大切入深度;e 為力指數;cmax為最大滲入深度時達到的最大阻尼;dg/dt 為滲入速度。
2.2 鏈節與鏈輪之間建模
在ADAMS 中接觸可分為連續接觸和瞬時接觸。計算接觸力有沖擊函數模型和泊松模型。沖擊函數模型表達式為。 (3)
式中:p 為罰參數;ε 為恢復系數。
參數選擇較大收斂變慢,選擇較小則很難保證其單向約束條件。采用改進拉格朗日模型,采用迭代方法求解接觸力,其公式為
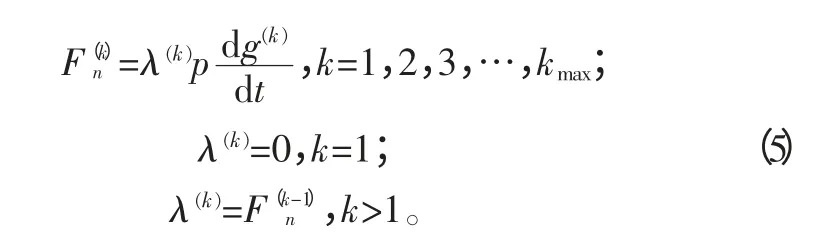
式中,k 為迭代步數。
通過上述過程,完成了對鏈傳動系統虛擬樣機的建模,共包括128 個剛體,4 個轉動副、124 個軸套約束、124個接觸約束,如圖3 所示。

圖3 鏈傳動系統虛擬樣機
3 鏈傳動的仿真驗證及結果分析
3.1 仿真驗證
鏈傳動按鏈節所處的位置可分為以下4 個部分:主動輪驅動部分、從動輪部分、緊邊部分和松邊部分,如圖4所示。本文采用驗證鏈傳動的緊邊力與松邊力的方法,即通過仿真測出緊邊力與松邊力,然后同理論計算值相比較,計算誤差是否在符合范圍內來確定鏈傳動的建模是否準確。
依據《機械設計》,鏈傳動緊邊拉力

鏈傳動松邊所受到拉力
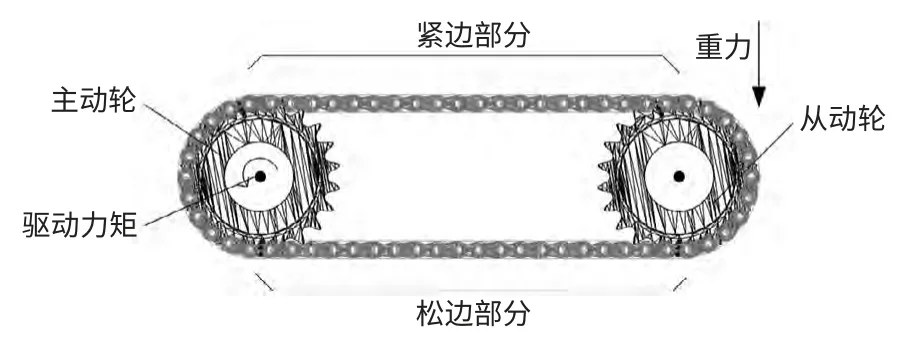
圖4 鏈傳動機構

式中:Fe為有效圓周力,Fe=1 000P/ν;Fc為離心力引起的拉力,Fc=qv2;Ff為懸垂拉力,Ff=Kfqa×10-2。
本文中依據所選鏈節型號,垂度系數Kf=1.5,鏈節速度v=0.09 m/s,q=0.7 kg/m。
依據上述參數帶入公式中得:F1=178.27 N,F2=161.57 N,為保證所得曲線能夠最大限度地反映真實情況,設定仿真時間為5 s,緊邊力與松邊力仿真結果如圖5、圖6 所示
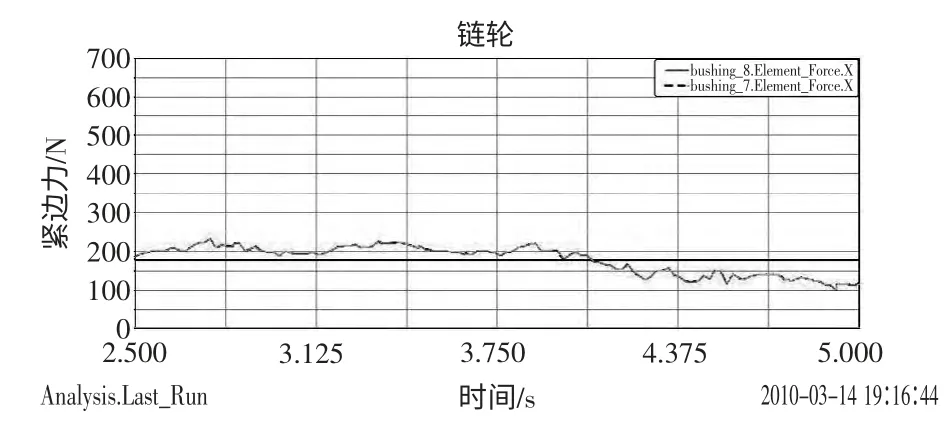
圖5 緊邊力變化圖
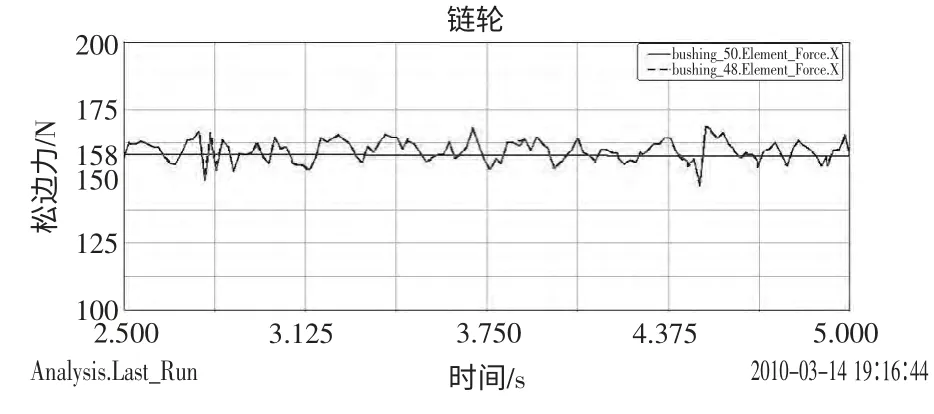
圖6 松邊力變化圖
對緊邊力和松邊力的仿真曲線積分,然后對時間做除法運算,得到力的平均值。緊邊力平均值為F1=177.29 N,與理論值的誤差為η=0.5%;松邊力平均值F2=158.4 N,與理論值的誤差為η=2.0%。考慮到鏈輪與鏈節之間摩擦、軸承之間摩擦等因素的影響,閉式鏈的誤差范圍為0~5%,計算結果在此范圍內,從而驗證了鏈傳動動力學建模的正確性。
3.2 結果分析
針對鏈傳動中的多邊形效應對鏈節的沖擊,本文主要研究鏈節橫向、縱向的速度、加速度變化以及鏈節與鏈輪之間接觸力的變化,來反映鏈傳動的運動特性。
由圖7、圖8 可知,鏈節在往復運動過程中,受到的橫向沖擊明顯要大于受到的縱向沖擊;在階躍點處,加速度變化較大;鏈節在運動過程中,進出嚙合點的加速度變化明顯,沖擊較大。
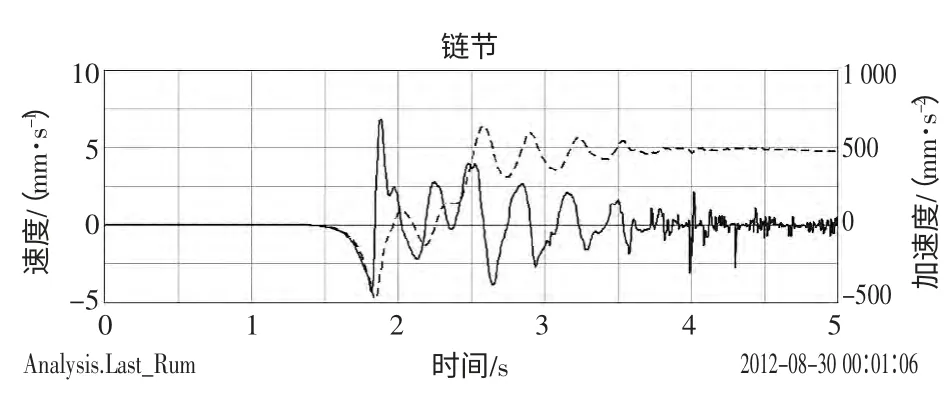
圖7 鏈節橫向速度、加速度變化圖
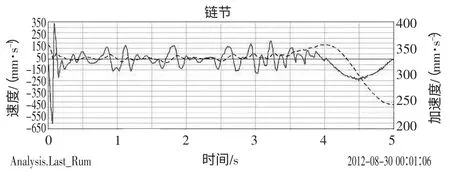
圖8 鏈節縱向速度、加速度變化圖
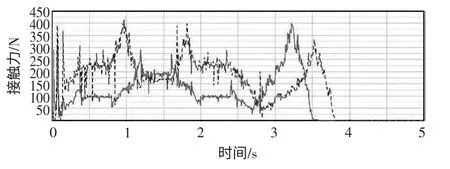
圖9 鏈節與主動、從動鏈輪接觸力變化圖
圖9 為鏈節14 與主動輪的接觸力曲線以及鏈節32與從動輪的接觸力曲線變化圖,可知鏈節越靠近緊邊接觸力值愈大,越靠近松邊接觸力值愈小,從鏈節嚙入到嚙出過程中,鏈節愈靠近緊邊接觸力變化愈快,接觸力出現峰值的點較少,變化較平穩。
4 結 論
本文提出用軸套力約束來模擬鏈節之間受力的多剛體動力學模型,運用ADAMS 命令流建立了鏈傳動系統的多體動力學仿真模型,并進行仿真,仿真結果驗證了鏈傳動建模的正確性,對鏈節振動以及鏈輪之間的沖擊問題進行很好的預測。
[1] JohnsonKL.ContactMechanics[M].London:Cambridge University Press,1985:15-28.
[2] 芮執元,魏興春,馮瑞成.基于ADAMS 的虛擬樣機技術及其在機構設計中的應用[J].科學技術與工程,2006(19):3111-3114.
[3] 濮良貴,紀名剛.機械設計[M].7 版.北京:高等教育出版社,2001.
[4] 蒲明輝,吳江.基于ADAMS 的鏈傳動多體動力學模型研究[J].機械設計與研究,2008(24):2-3.
[5] Kim H N.Impact dynamics of axially moving chains with tensioner[D].Pennsylvania State University,1997:1-3,80-82.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
