某機(jī)載光電吊艙熱環(huán)境下光軸平行性建模與分析
2014-07-04 01:33:38遲圣威楊曉強(qiáng)徐紅偉
機(jī)械與電子 2014年4期
關(guān)鍵詞:變形
遲圣威,朱 鐳,楊 光,楊曉強(qiáng),徐紅偉
(西安應(yīng)用光學(xué)研究所,陜西 西安710065)
0 引言
多光軸校準(zhǔn)一直是機(jī)載光電穩(wěn)瞄系統(tǒng)的關(guān)鍵技術(shù),包括光軸準(zhǔn)直和光軸平行性,光軸準(zhǔn)直可依靠光學(xué)調(diào)校來實(shí)現(xiàn)。光軸平行性則受到傳感器安裝載體材料的均勻性和不穩(wěn)定性、振動(dòng)效應(yīng)、裝配應(yīng)力和環(huán)境溫度等多種因素的共同作用[1]。在實(shí)際的光軸機(jī)械調(diào)校過程中,通常利用某一傳感器的光軸作為基準(zhǔn),調(diào)整其他傳感器的光軸,使它們按平行性要求與基準(zhǔn)保持在一定誤差范圍內(nèi)。所以,對于多光軸系統(tǒng),光軸之間的平行度是非常關(guān)鍵的指標(biāo)。根據(jù)場地條件的不同,提出了多種檢測光軸平行性的辦法[2]。不過這些工作的不足之處在于,都是在產(chǎn)品加工和裝配完成后進(jìn)行的。而在設(shè)計(jì)階段更多的是憑借以往的設(shè)計(jì)經(jīng)驗(yàn),沒有其他的考核手段,且由于系統(tǒng)工作溫度范圍大,除去傳感器自身的光軸會(huì)在熱環(huán)境下產(chǎn)生偏移外,光具座熱變形也會(huì)帶來光軸偏移。從以往的經(jīng)驗(yàn)來看,在酷熱和嚴(yán)寒環(huán)境下光軸的偏移量較大,也最難克服。因此,研究熱環(huán)境下的光軸平行性問題具有重要實(shí)際意義。根據(jù)模型的特點(diǎn)和檢測方法的啟發(fā),提出一種仿真模型,用來研究某機(jī)載光電吊艙的光具座熱變形對傳感器光軸平行性的影響。
1 幾何模型
光具座是光電傳感器的直接載體,結(jié)構(gòu)形式為平板結(jié)構(gòu)。3個(gè)傳感器分別安裝在光具座的兩側(cè),為了保證光具座加工的平面度和便于裝配的要求,按傳感器的尺寸在2個(gè)平面上加工多個(gè)1 mm凸臺(tái)作為安裝面。同時(shí),通過上下兩片耳朵狀的法蘭固定在俯仰框架上。3個(gè)傳感器重量分別為紅外傳感器6 kg,CCD傳感器2.3 kg,激光傳感器6 kg。
光軸的建立是設(shè)計(jì)的重點(diǎn)。本來多數(shù)傳感器不止一個(gè)窗口,各窗口應(yīng)有自己的光軸,不過在這里不考慮傳感器自身的因素,僅考慮光具座對光軸的影響。為此,每個(gè)傳感器只用一個(gè)光軸模擬就足夠了。從CAD軟件中獲取各傳感器在整體坐標(biāo)系下的質(zhì)心位置。把沿傳感器縱向并通過質(zhì)心的直線作為傳感器的模擬光軸。這樣的選擇不僅物理概念清晰,而且為后面的仿真計(jì)算帶來了便利。光具座的裝配關(guān)系如圖1所示。

圖1 光具座裝配關(guān)系
2 有限元模型
2.1 網(wǎng)格劃分與單元的選擇
由ANSYS自動(dòng)生成的高階四面體單元會(huì)在凸臺(tái)等幾何特征附近細(xì)化大量的網(wǎng)格。加上在后期生成大量的約束方程,超出ANSYS軟件可調(diào)用的內(nèi)存上限導(dǎo)致求解失敗。而一階四面體是常應(yīng)變單元,精度較低。綜合考慮精度、計(jì)算的成本和可行性,采用一階六面體單元。
在CAD軟件中處理完模型后,用中間格式導(dǎo)入Hyper Mesh軟件,將實(shí)體分割為可映射的幾何體。首先生成面網(wǎng)格,按照單元最大角度、單元縱橫比和雅可比值等指標(biāo)控制網(wǎng)格質(zhì)量。隨后用體映射方法拉伸四邊形網(wǎng)格高質(zhì)量的六面體網(wǎng)格。最后通過網(wǎng)格連續(xù)性檢查來完成,結(jié)果如圖2所示[3]。

圖2 Hyper Mesh生成的六面體網(wǎng)格
2.2 材料屬性
把生成的網(wǎng)格導(dǎo)入ANSYS軟件繼續(xù)完善前處理。通常,在仿真過程中會(huì)將熱膨脹系數(shù)設(shè)為常量,事實(shí)上應(yīng)當(dāng)考慮溫度范圍較寬時(shí)會(huì)帶來誤差。因?yàn)榻饘俨牧系臒崤蛎浵禂?shù)會(huì)隨著溫度變化而改變[4]。根據(jù)考察的溫度范圍和求解的工況條件,可以分成兩段并賦予相應(yīng)的熱膨脹系數(shù)來提高求解精度。其中,高溫段為20~60℃;低溫段為20~-40℃,材料的物理屬性如表1所示。

表1 鑄鋁光具座的材料屬性
2.3 邊界條件
光具座通過螺栓與外部框架聯(lián)接,在仿真分析時(shí)做如下處理:對上下3個(gè)螺釘孔內(nèi)壁位置附近的節(jié)點(diǎn)施加固定邊界條件,來模擬兩者之間裝配關(guān)系。
2.4 光軸的建模
在傳感器的質(zhì)心位置創(chuàng)建mass21質(zhì)量單元,其有6個(gè)自由度可直接表示模擬光軸的偏轉(zhuǎn)角度。不過它一般只能在動(dòng)力學(xué)分析中才能激活其質(zhì)量屬性,為此,這里附加一個(gè)重力場,把結(jié)構(gòu)的自重考慮在內(nèi),以解決上述問題。
2.5 剛性區(qū)域的建立
在質(zhì)量單元和對應(yīng)的安裝凸臺(tái)之間運(yùn)用剛性區(qū)域功能建立剛性約束關(guān)系,連接過程如圖3所示。最終應(yīng)該選擇安裝凸臺(tái)上全部節(jié)點(diǎn),需要注意的是,所選的三維實(shí)體單位只有3個(gè)自由度,在設(shè)置自由度時(shí)只需關(guān)聯(lián)平動(dòng)自由度即可,否則會(huì)警告信息超出上限而中止求解。
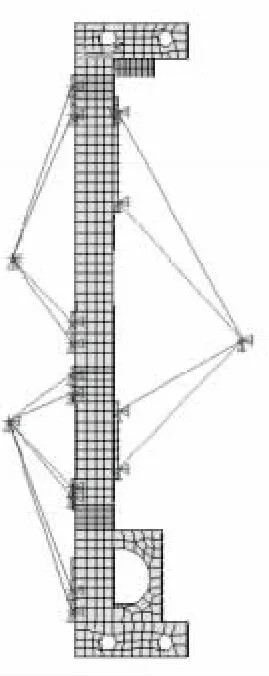
圖3 光軸和剛性區(qū)域的建立過程
2.6 光軸基準(zhǔn)的選擇
考察多傳感器之間光軸的平行性關(guān)系,首先要選擇光軸平行性的基準(zhǔn)。根據(jù)實(shí)際工作中光軸調(diào)校的經(jīng)驗(yàn),常用大口徑平行光管法。對于帶有激光傳感器的光具座,都是采用激光傳感器的光軸作為光軸平行性的基準(zhǔn)(參考圖1),根據(jù)吊艙的運(yùn)動(dòng)方式,橫滾軸的偏轉(zhuǎn)主要引起的是像的旋轉(zhuǎn),而不影響光軸的指向[5],僅需要考察光軸在方位(圖2,Y 軸)和俯仰(圖2,Z軸)方向的偏轉(zhuǎn)角度即可[6]。
2.7 溫度載荷的施加
除去傳感器的安裝方式對結(jié)構(gòu)熱變形限制[7],影響熱變形的主要因素還有溫度的增量和熱膨脹系數(shù)。在這里,溫度的增量指的是環(huán)境溫度和參考溫度之差。參考溫度可以認(rèn)為是材料熱膨脹為零的基點(diǎn),根據(jù)不同的材料有不同數(shù)值,一般金屬材料選擇室溫即可,這里設(shè)置為20℃,而極限工作環(huán)境分別為60℃和-40℃。
3 靜熱耦合分析
常見的熱應(yīng)力計(jì)算包含3種方法,分別是直接加載溫度載荷、耦合法和間接方法。后2種方法需要求解系統(tǒng)溫度場作為外部的載荷,進(jìn)而求解結(jié)構(gòu)的應(yīng)力和變形。兩者區(qū)別僅僅是根據(jù)熱效應(yīng)和力學(xué)效應(yīng)的耦合程度,是同時(shí)選擇求解力場和溫度場,還是先求解溫度場后求解力場。在這里溫度場分布為已知量,問題就簡化成一個(gè)純粹的熱彈性力學(xué)問題。所以選擇直接加載溫度應(yīng)力。因?yàn)樵诟飨蛲圆牧现袩崤蛎浵禂?shù)不隨方向改變,所以它在3個(gè)方向上的正應(yīng)變相同,不會(huì)產(chǎn)生任何剪應(yīng)變。同時(shí),在2個(gè)溫度范圍內(nèi)分別假定熱膨脹系數(shù)α為常數(shù),熱效應(yīng)在彈性體產(chǎn)生的形變分量為:

熱效應(yīng)和力效應(yīng)引起的總形變分量為:

用數(shù)值方法求解上述微分方程組,就可以得到熱彈性力學(xué)的應(yīng)變和位移。
4 結(jié)果分析
首先,僅考慮傳感器自重本身的影響,得到常溫下光軸的偏轉(zhuǎn)角度如表2所示(相對于激光傳感器)。從所得到結(jié)果的單位就可以看出,光軸在自重下的偏轉(zhuǎn)角度是在給定溫度熱變形下的偏轉(zhuǎn)角度的千分之一左右。也就是說,對于完成配平的光具座而言,自重對結(jié)果的影響極小,可以忽略。

表2 常溫下光軸的偏轉(zhuǎn)角度 μrad
接著,計(jì)算結(jié)構(gòu)自重和溫度載荷共同作用下光具座的變形情況。為了滿足裝配和減重的要求,光具座并不是厚度為常數(shù)的均勻平板,導(dǎo)致其熱脹冷縮的量值也不均勻,這點(diǎn)從放大變形的角位移云圖(如圖4和圖5所示)上得到了反映,厚度較小的位置出現(xiàn)了類似翹曲的形式。這種厚度變化和安裝孔位的位置進(jìn)一步制約了熱變形下光軸平行性的提高。不過,由表3和表4(相對于激光傳感器)的結(jié)果可以看出,在60℃高溫和-40℃低溫下,不論是CCD傳感器的光軸,還是紅外傳感器的光軸,在方位和俯仰2個(gè)方向,與激光傳感器光軸的最大偏轉(zhuǎn)角度均低于0.25 mrad。在方位和俯仰的耦合方向上,最大偏轉(zhuǎn)角度小于0.26 mrad。

表3 60℃時(shí)光軸的偏轉(zhuǎn)角度 mrad

表4 -40℃時(shí)光軸的偏轉(zhuǎn)角度 mrad
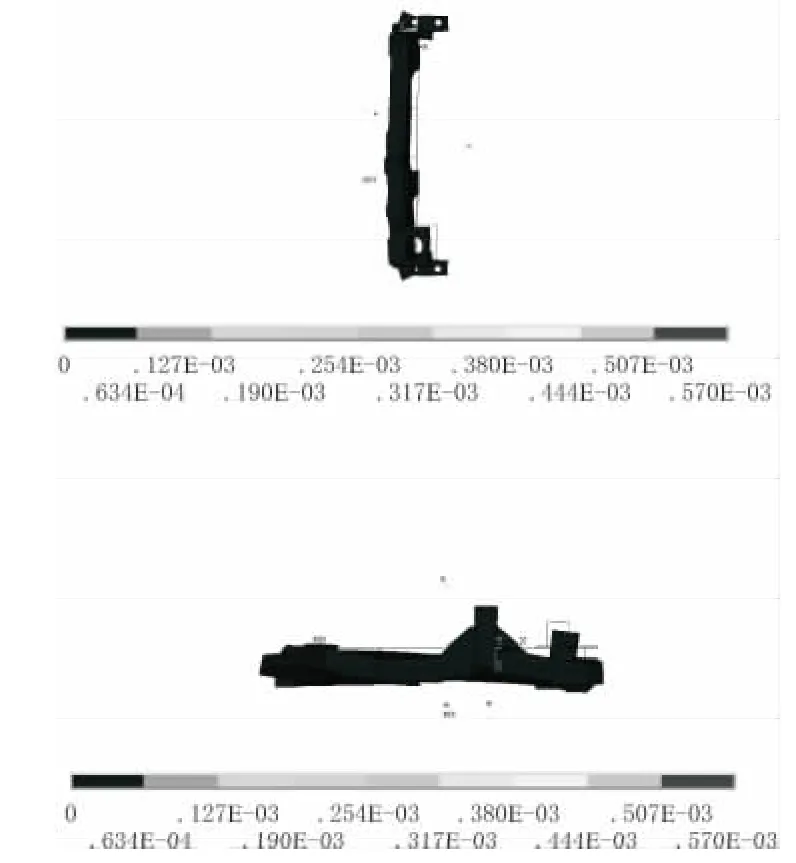
圖4 60℃環(huán)境下光具座角位移云圖

圖5 -40℃環(huán)境下光具座角位移云圖
5 考核指標(biāo)
實(shí)際飛行考核的是位于2 km外的4 m×4 m的標(biāo)準(zhǔn)目標(biāo),由傳感器最大的光軸偏轉(zhuǎn)角度(0.252 mrad),引起的誤差約為0.504 m。對于標(biāo)準(zhǔn)目標(biāo),這樣的誤差是可以接受的,其結(jié)果滿足吊艙在精確打擊任務(wù)中的使用要求[8]。
6 結(jié)束語
由仿真結(jié)果看出,按保守情形計(jì)算,3個(gè)模擬光軸的平行性最大誤差仍然滿足目前使用要求。并且,與熱區(qū)和寒區(qū)的外場試驗(yàn)中的光軸平行性狀態(tài)接近。計(jì)算結(jié)果得到了較為理想的驗(yàn)證。
在下一步的工作中,如能進(jìn)一步對光具座優(yōu)化外形,增加重量,改進(jìn)傳感器的安裝位置,或采用鈦合金等熱膨脹系數(shù)更小的材料,可獲得更高的光軸平行度。同時(shí),若在建模時(shí)能考慮摩擦、間隙等非線性效應(yīng),建立更為準(zhǔn)確的模型,將會(huì)得到更加符合實(shí)際的結(jié)果。
[1] 馬世幫,楊 紅,楊照金,等.光電系統(tǒng)多光軸平行性校準(zhǔn)方法的研究[J].應(yīng)用光學(xué),2011,32(5):917-921.
[2] 楊 旸.多光軸光學(xué)系統(tǒng)光軸平行性校準(zhǔn)技術(shù)研究[D].西安:西安工業(yè)大學(xué),2012.
[3] 王鈺棟,金 磊,洪清泉,等.Hyper Mesh & Hyper-View應(yīng)用技巧與高級實(shí)例[M].北京:機(jī)械工業(yè)出版社,2012.
[4] 費(fèi)業(yè)泰,等.機(jī)械熱變形理論及應(yīng)用[M].北京:國防工業(yè)出版社,2009.
[5] 凌 軍,劉秉琦,趙熙林.幾種光軸平行性測試方法的比較與探討[J].應(yīng)用光學(xué),2003,24(1):43-44.
[6] Laskin R A,Sirlin S W.Future payload isolation and pointing system technology[J].Journal of Guidance,Control,and Dynamics,1986,9(4):469-477.
[7] 葉 露,沈湘衡,劉則詢.強(qiáng)激光與紅外光學(xué)系統(tǒng)光軸平行性檢測方法的討論[J].應(yīng)用光學(xué),2007,28(6):760-763.
[8] 郭 城,李 梅,王 靜.光電偵察系統(tǒng)的轉(zhuǎn)臺(tái)軸系正交偏差對系統(tǒng)定向精度的影響分析[J].應(yīng)用光學(xué),2009,30(S1):16-19.
猜你喜歡
智慧少年·故事叮當(dāng)(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學(xué)研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學(xué)版(2020年11期)2020-02-01 06:26:58
作文周刊·小學(xué)二年級版(2018年29期)2018-11-26 11:20:28
小學(xué)生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數(shù)學(xué)小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(2016年12期)2016-12-26 21:37:36
