面向三維建模的車載移動影像采集系統設計與實現
2014-07-02 00:21:32劉全海王重天
測繪通報 2014年12期
關鍵詞:系統
劉全海,王重天
(1.武漢大學測繪學院,湖北 武漢 430079;2.常州市測繪院,江蘇 常州 213003;3.常州市地理信息智能技術中心,江蘇 常州 213003)
面向三維建模的車載移動影像采集系統設計與實現
劉全海1,2,3,王重天2,3
(1.武漢大學測繪學院,湖北 武漢 430079;2.常州市測繪院,江蘇 常州 213003;3.常州市地理信息智能技術中心,江蘇 常州 213003)
由于城市道路及景觀三維建模的紋理獲取工作面廣量大且具有一定危險性,設計了一種簡易的車載移動街景影像采集系統,在加快道路及兩側建筑特等景觀的高質量紋理獲取的同時,可以獲取影像的空間位置;而高精度的地面高程可用于修正三維地形起伏,對快速、精細的城市三維建模有著重要的推動作用。試驗證明,按照本文方法設計并實現的街景影像采集系統投入少、效果好,推廣實效性強。
三維建模;街景影像;移動采集;同步
一、引 言
隨著計算機圖形學、虛擬現實技術的迅猛發展,三維數字城市已經開展大規模建設和應用。建模層次、模型標準、幾何及紋理等方面已有大量的研究[1-3],武漢、重慶、常州等城市為代表的城市級三維模型制作和應用探索,也推動著三維城市向深層次發展。隨著三維數字城市的深入,城市規劃、建設和管理行業對三維城市提出了新的更高的要求。在城市規劃、公安、城管等領域要求三維場景達到真實、優美和動感的效果,能給用戶帶來強烈的、逼真的視覺沖擊,甚至于要求逐步達到一些游戲軟件中的動畫特效,過去體塊式框架模型(LOD1)、帶有紋理的標準三維模型(LOD2)已不能滿足要求,三維模型必須達到LOD3、LOD4級,使得三維制作時模型更加精細、建筑紋理更加真實逼真、道路場景更加準確全面。如何快速實現優美、精細的城市三維建模,已經成為三維制作者思考和必須解決的重要課題。
三維城市審批模型建設是一項龐大的系統工程,其耗費大、耗時長[3],需要對城市街區包含的大量建筑、道路及城市景觀、城市部件進行三維全面建模,同時建立多分辨率紋理表達的細節層次模型[4]。三維建模紋理采集主要有實地攝影、航空航天遙感、激光掃描、航空傾斜攝影及移動測量系統[5-7]等方法。以可量測的實景影像表達三維街景的移動道路測量系統在數字城市建設中有廣泛的應用,但它不能在三維實景影像中插入、編輯和全方位瀏覽規劃三維方案模型,難以建立滿足城市規劃需要的三維城市模型。
目前主流的精細建模主流方式[2]是以CAD的矢量數據為基礎,使用3ds Max、Multigen Creator等建模工具,人工構建建筑物的幾何模型,通過航測獲取頂面紋理,通過地面拍攝側面影像,利用Photoshop等圖像處理工具對采集得到的紋理數據進行編輯處理,得到合適的紋理并進行貼圖。在實際作業中,外業照攝時受車輛、樹木等遮擋,難以達到理想的拍攝位置和高度,導致紋理貼圖融合處理的工作量增大,且精細的道路地形起伏也要求高精度的路面高程信息。因此設計并實現一套能兼顧拍攝速度及圖像,同時能獲取高程的車載移動影像采集系統顯得尤其必要。
二、系統構成與原理
1.系統整體架構
面向三維建模的車載移動高質量影像采集系統主要考慮以下方面:一是精確獲取包括地面高程在內的移動車輛運動軌跡,以此為基準實現地面三維建模的地形起伏變化,滿足地下管線三維可視化及三維數字城管部件對地形真實性表達的要求;二是在理想的位置獲取高質量的街景紋理,滿足城市道路及景觀三維建模時對高質量紋理的需要;三是獲取的紋理與空間相關聯,便于圖片的搜索、集成和發布應用;四是成本因素,滿足需求的同時盡可能降低投入。基于此,本文設計并實現了一種輕量級的車載移動高質量影像采集系統,滿足了三維建模對紋理分辨率及精確的地面高程雙重需要,系統結構圖如1所示。

圖1 系統結構圖
2.基本原理
整個系統由以下幾個模塊組成:一是車載移動動態定位系統,由一臺基于北斗增強的三星CORS系統的網絡RTK移動終端組成。采用無線網絡通信技術獲取差分RTK改正信息,并實時獲取動態定位信息。二是采用高質量街景及全景影像采集單元,主要由4臺單反相機和1臺全景相機組成。通過4臺單反相機獲取前、后、左、右4個不同方向的影像紋理,提高影像的獲取效率,對判讀城市道路景觀及紋理獲取非常有幫助。1臺全景相機獲取移動位置的全景影像。系統采用的全景相機LadyBug5圖像分辨率3000萬像素以上,其主要參數見表1。三是同步控制器單元,通過內觸發和外觸發兩種方式對GPS RTK、單反相機和全景相機進行同步[8]。四是數據傳輸系統,對采集的RTK和影像、全景數據進行及時傳輸、存儲。五是數據后處理系統,實現對分辨率影像空間位置匹配、處理、集成和建庫。通過對系統幾何結構參數的精確測定,并通過相對坐標位置的運動方位計算,對每臺相機在拍攝時的空間位置和方位進行空間匹配,在此基礎上建立街景影像庫實現快速調圖及利用。
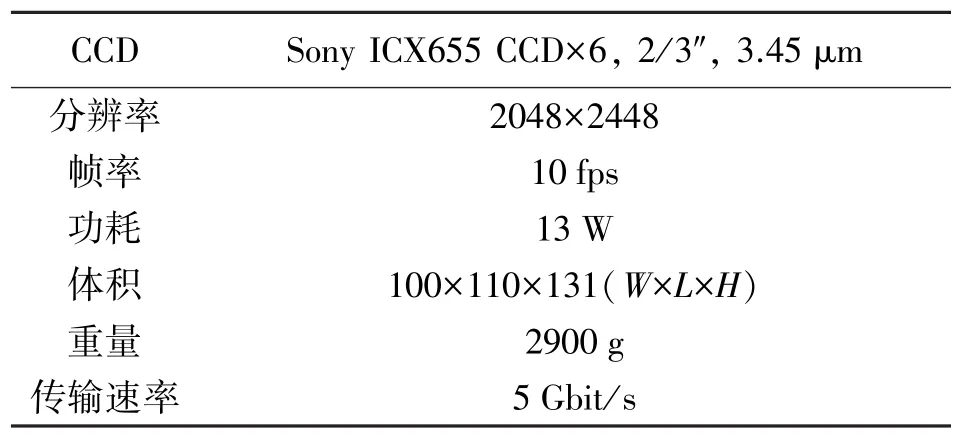
表1 LadyBug5主要參數
三、關鍵技術與實現
1.基于北斗增強的三星CORS的移動定位
車載移動影像采集系統可以在移動狀態下獲取目標的精確空間位置。在城市密集區,建筑物及樹木的遮擋對GPS信號產生干擾,一般通過GPS結合INS慣性定位定姿,但INS設備較昂貴,實用性不強。
我國自行研制的北斗衛星導航系統可在全球范圍內全天候、全天時為各類用戶提供高精度、高可靠的定位、導航、授時服務,并兼具短報文通信能力,且北斗星座的分布在中國區域更加合理,可視衛星多,衛星高度角大。基于北斗增強的三星CORS系統由于可觀測衛星的增多,在初始化時間、解算時間方面顯著增強,其聯合定位精度和穩定性要比單一系統優越[9];經測試,在城市建筑密集區,以及綠化茂盛的道路上其空間可用性有30%的提高。精細區域似大地水準面與GPS的有效結合,進一步提高了移動對象的高程精度。
移動車輛的地面軌跡高程為

式中,HGPS為實時的GPS天線相位中心的大地高;Ha為天線相位中心與地面的距離(含天線高及車輛高度,可精確測定);ξ為高程異常值,可從似大地水準面精化成果中獲得;Δi為車輛運動時避震及輪胎變形值。
輪胎變形與胎壓、車速、載重相關,根據測試,其值根據車速發生變化,一般在1~3 cm之內。
2.GPS、單反相機和全景相機的同步控制
本文采用以單片機為核心控制多臺相機同步曝光的觸發方式,如圖2所示。通過安裝在車輪上的霍爾傳感器感知車輪轉動,車輪每轉一圈,霍爾器件便檢測到一次磁信號,通過脈沖產生電路發出中斷脈沖,單片機響應此信號,對脈沖信號計數,通過相應換算,得到行駛的里程、車速等信息,來觸發單反相機和360°全景相機,車輪轉動檢測裝置如圖3所示。
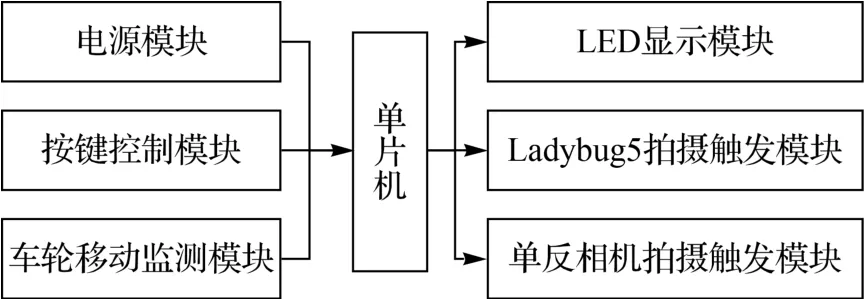
圖2 同步控制器
同步控制器包括內、外兩種觸發方式。內觸發方式是通過控制器在內時鐘的驅動,按設定的周期和脈沖寬度產生連續脈沖,放大后作為觸發信號控制4臺單反相機和1臺全景相機進行同步拍攝,實現時間控制;外觸發方式是使用車輛的車輪轉動監測裝置獲得的脈沖信號作為外部激勵脈沖,通過編程來控制距離,并在外部激勵脈沖的驅動下實現同步控制,實現距離控制。
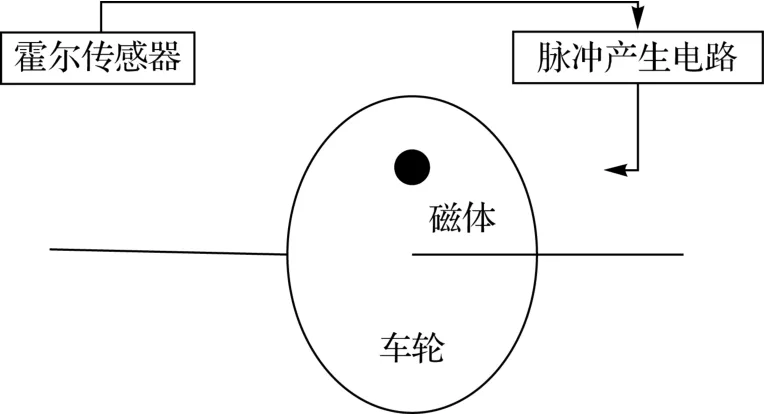
圖3 車輪轉動檢測裝置
為了便于統一調用和位置一致,單反相機和全景相機的曝光時間須同步。由于高像素、大內存的單反相機(如Canan,Nikon)只能進行單臺控制拍攝,4臺相機的同步控制需要設計同步控制器來協同相機的同步攝影及實時傳輸。系統使用單片機對連接至同一系統控制器上的單反相機進行快門同步。影像數據通過USB接口數據線實時下載至計算機中。
3.高分辨率的街景和全景影像的空間位置匹配
時間匹配是車載移動影像采集系統的重要方面。通過GPS時鐘和相機等傳感器的數據在起始時的時間保持一致,或獲取GPS時鐘與傳感器的時間差,以便通過時間關聯來進行影像數據的定位。
通過時間匹配可以將由GPS和單反相機獲取的時間和空間進行進行聯合處理。由同步控制器控制的單反相機的同步的采集時間,通過時間內插或外推的方式確定每一張街景影像在絕對空間坐標系中的位置信息。算法基本步驟如下:
1)設獲取圖像Mi的采集時間戳,該圖像采集時刻前最后一個GPS位置數據信息為P1(x,y,z),采集時刻后第一個GPS位置數據信息為P2(x,y,z),如P1對應的時間戳,P2對應的時間戳,則圖像Mi的采集時刻的GPS位置計算如下
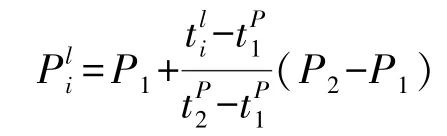
同理,設獲取這張圖像Mi的采集時刻的前進方向,公式如下
2)在獲取Mi的采集時刻的空間位置Pli和前進方向后,根據精確測定的系統幾何結構參數,如每臺相機 C1、C2、C3、C4相對于 Mi的位移 ΔP (Δx,Δy,Δz),以及相機鏡頭與移動車輛前進方向的夾角Δc,根據大地坐標系統與測量坐標系之間的換算公式,有
集成高清晰度的單反相機和全影像機即能構建基于三星的移動測量系統,實現城市道路的移動路線的精確高程獲取,以及高分辨率的城市街景紋理獲取。
4.后處理軟件
后處理軟件主要實現各類數據下載、坐標轉換、空間位置匹配及數據處理、數據入庫等功能,如圖4所示。利用GPS RTK坐標處理軟件提供RTK數據的下載、WGS-84坐標與地方坐標的轉化等功能。街景影像GPS數據與照片處理軟件實現照片拍攝的時間信息處理,根據照片拍攝的時間與GPS RTK坐標采集的時間進行RTK實測坐標與照片相位中心的位置坐標內插匹配、街景影像數據的建庫,以及數據庫的管理等功能,如圖5所示。街景影像數據庫包街景前視照片表、街景側視照片表及街景照片的相位中坐標表,存儲了照片的時間信息與相位中心的坐標信息。

圖4 導入界面
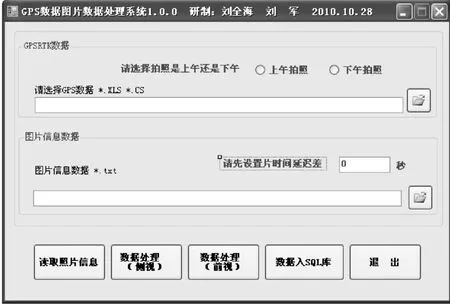
圖5 坐標內插匹配計算
5.街景影像的數據組織和應用管理
由于各分辨率的街景影像數據量大,對影像數據按道路、時間或空間位置進行管理時,系統采用了SQL Server數據庫,采用 VB.NET語言,在 Auto-CAD2004環境下開發了街景影像應用工具條(如圖6所示),實現AutoCAD環境下影像數據快速調用(如圖7所示),并在三維數字城管系統中集成應用(如圖8所示)。
圖6 CAD下開發的專用工具條
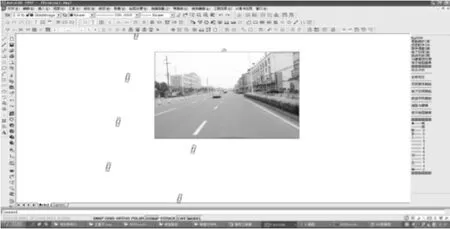
圖7 AutoCAD街景影像調用

圖8 三維數字城管系統中的集成
四、試驗與分析
按照上述方法,本文設計并實現了面向三維建模的車載移動影像采集系統。為驗證系統的精度和可靠性,本文選取了5個典型的試驗區進行精度及可靠性檢驗。試驗區1為建城密集區的平面道路;試驗區2為一般建城區的平面道路;試驗區3為常州市高架路南環線,高架路上基本無遮擋,橋面高于地面約15 m;試驗區4為常州市高架路上復雜立交線,形式復雜;試驗區5為城市立交地道處。
1.精度測試
精度測試結果見表2,可以看出,采用本文方法的高程精度達到甚至超過LOD4細節層次模型高程精度(≥0.2 m)的要求。

表2 試驗區高程精度測試
2.采集效率對比
目前,每個學校的每個學科都在培養學生的個性化,其中也包含體育課程。在以往的傳統教學中,老師只是一味地讓學生們跟著教學進度進行運動,而且過分強調運動時間、運動項目,學生在體育課不能進行感興趣的運動。現代教學論視角下體育教育信息有利于培養學生的個性化。每個學生個體存在差異性,個人的體能是不一樣的。對于體弱的學生不能進行強化運動,對于身體素質較好的學生過于輕松地訓練不利于身體強健。學生在體育教育的發展中要形成不同的愛好和興趣,找到能體現自我的運動。
本文方法采取移動測量車按兩相機同步拍攝,可達6000張/h(拍攝頻率5 m/張,車速30 km/h),一般拍攝時間為3~4 h每天,也可飽和拍攝5~6 h每天。由表3可以看出,本文方法是傳統方式的效率的30倍。
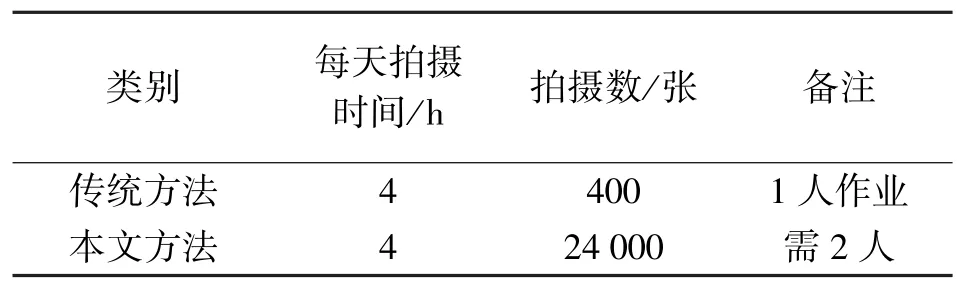
表3 采集效率統計對比
本文采用的單反相機分辨率≥1800萬,采用的Ldaybug5的圖像分辨率≥3000萬像素,比Ladybug3提高60%以上,為建立精細城市三維提供了高質量的紋理數據。同時街景影像與GPS位置信息的匹配和關聯便于街景影像調用、圖片方位判別,極大地方便了三維建模。
五、結束語
根據本文方法設計與實現的車載移動影像采集系統投資少、便于維護,采集的街景影像分辨率高,可同步獲取行車路線的精確高程,為三維建模時的地形起伏匹配與改正提供了準確的地形高程。后處理軟件不僅方便三維建模工作者快速調用,而且可在三維城管系統及城市應急信息系統適中集成應用,并可以在城市街景地圖系統中發布應用。不足之處在于尚未考慮街景影像的三維像對,缺乏車載LiDAR的集成,將在后續高質量影像采集系統中作進一步研究。
[1] 中華人民共和國住房和城鄉建設部.CJJ/T157—2010城市三維建模技術規范[S].北京:中國建筑工業出版社,2010.
[2] 高山.陳思.城市三維建模技術與標準研究[J].測繪通報,2013(3):95-97.
[3] 趙中元,高山.三維數字城市建模精度與制作標準研究[J].數字城市,2010(8):17-19.
[4] 楊必勝,李清泉,史文中.三維GIS中多分辨率紋理模型的研究 [J].中國圖象圖形學報:A輯,2003,8(3):328-333.
[5] 李德仁.基于可量測實景影像的空間信息服務[J].武漢大學學報:信息科學版,2007,32(5):377-380.
[6] 李德仁.從數字地圖到空間信息網格—空間信息多級網格理論思考[J].武漢大學學報:信息科學版,2003, 28(6):642-650.
[7] 李德仁.移動測量技術及其應用[J].地理空間信息,2006,4(4):1-5.
[8] 高文武,賀賽先.基于GPS的CCD相機同步控制器[J].武漢大學學報:信息科學版,2004,29(8):743-746.
[9] 王世進,秘金鐘,谷守周,等.BDS/GPS組合相對定位方法及精度分析[J].測繪通報,2014(5):1-4.
[10] 全威,郝桂菊.用3ds Max建立城市房屋3維模型的方法[J].測繪與空間地理信息,2011,34(6):194-195,200.
The Design and Implementation of the 3D-modeling-oriented Vehicle-mounted Mobile Image Acquisition System
LIU Quanhai,WANG Chongtian
P237
B
0494-0911(2014)12-0012-04
劉全海,王重天.面向三維建模的車載移動影像采集系統設計與實現[J].測繪通報,2014(12):12-15.
10.13474/j.cnki.11-2246. 2014.0386
2014-06-30
住建部科學技術項目計劃(2013-S5-4)
劉全海(1972—),男,甘肅舟曲人,博士生,主要研究方向為三維數字城市建設理論。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
