關于高精度航空磁測中的磁補償原理及補償效果評價的探討
2014-06-27 01:38:42盧立波
物探化探計算技術 2014年4期
劉 浩,盧立波,楊 望
(中國冶金地質總局 航空物探院)
0 引言
為了消除磁干擾,在航空磁測中通常除了需要安裝測量地磁場的高精度光泵磁力儀探頭外,還必須安裝一個三分量飽和式磁通門磁力儀,其目的是采集飛機在規定的方向上做特定動作時所引起的磁場變化數據。這樣就可根據補償飛行中的磁總場、三分量飽和式磁力儀數據,計算得出飛機磁干擾場的數學模型的各項干擾場系數,從而根據這些系數來消除飛機的磁干擾。在補償完成后,需要繪制出補償前和補償后的磁總場對比數據曲線圖,并對補償的效果進行評價。原有方法是用“手工”的方法在補償后數據的曲線圖上測出磁干擾場的剩余量來表示此次補償的效果,這樣就容易產生很大的人為誤差,是高精度航空磁測所不能接受的,于是就需要引進一些指標來進行量化的分析和評價。
1 飛機磁干擾場的補償原理簡述
光泵磁力儀探頭所測得的磁場數據為地磁場和飛機干擾場之和。用He來表示地磁場,HTOT表示飛機干擾場,所測得的磁總場H就等于前兩項相加。
H=He+HTOT
由于磁總場為矢量,可以用T表示光泵磁力儀探頭位置的磁總場H橫向分量,即X分量;用L表示探頭處的磁場H的縱向分量,即Y分量;用V表示探頭處磁總場H的垂直分量及Z分量。其表達式為:
H2=T2+L2+V2
其三個方向的余弦表達式為:
cosX=T/H
cosY=L/H
cosZ=V/H
雖然磁測飛機在測線飛行過程中機身的姿態是復雜的,但是可以被分解稱為3種基本動作:側滾、搖擺和俯仰(圖1)。這樣就產生了側滾角Ω、側滾角Ψ和俯仰角λ,還有飛機所在地理位置的地磁傾角Φ和航向角θ(與磁北方向的順時針夾角)。這些可以根據飛機上安裝的三分量磁通門磁力儀采集到的不同飛行動作時的各個分量的磁數據變化來推算出來。
1)飛機側滾時,俯仰角和搖擺角為0°的情況下:
cosX= cosΦsinθcosΨ+sinΦsinΦ
cosY=cosΦcosθ
cosZ=sinΦcosΨ-cosΦsinθsinΨ。
2)飛機俯仰時,側滾角和搖擺角為0°的情況下:
cosX=cosΦsinθ
cosY=cosΦcosθcosλ+sinθsinλ
cosZ=sinΦcosλ-cosΦcosθsinλ。
3)飛機搖擺時,側滾角和俯仰角為0°的情況下:
cosX=cosΦsinθcosΩ-cosΦcosθsinΩ
cosY=cosΦcosθcosΩ+cosΦsinθsinΩ
cosZ=sinΩ。
4)當飛機平飛時,俯仰角、側滾角和搖擺角都為0°時:
cosX= cosΦsinθ
cosY=cosΦcosθ
cosZ=sinΦ。
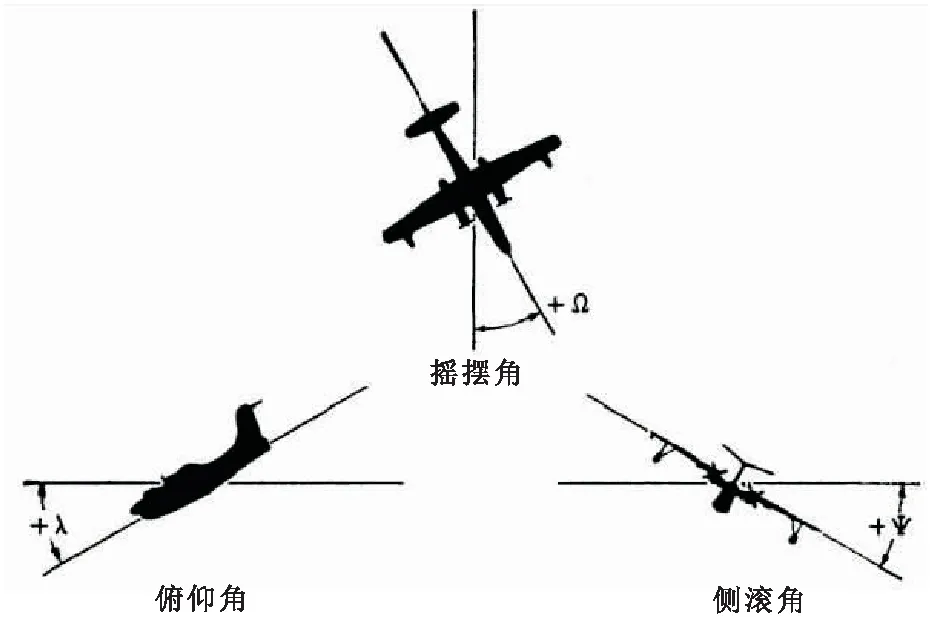
圖1 飛機姿態示意圖Fig.1 Craft attitude sketch
對于飛機的磁干擾場HTOT,主要包含恒定干擾場、感應場和渦流場。
HTOT=HPERM+HIND+HEDDY
其中HPERM為飛機的恒定干擾場,是指飛機上的永久磁性體對磁場的影響,其作用在光泵磁力儀探頭位置處的表達式為:
HPERM=p1 cosX+p2cosY+p3cosZ
(p1、p2、p3為飛機恒定干擾場在X、Y、Z三個方向上的投影值);
HIND為感應場,是指飛機上的軟磁物質在地磁場的作用下,產生的感應干擾場,其作用在光泵磁力儀探頭處的表達式為:
HIND=He(i1 cos2X+i2cosXcosY+i3cosXcosZ+i4cos2Y+i5cosYcosZ+i6cos2Z)
(i1,i2,…,i6為飛機感應干擾場在X、Y、Z三個方向及相關作用項上的投影值)
HEDDY為渦流場,是由飛機上的導電部件(主要為機皮)在地磁場作用下產生的渦電流引起的干擾場,這些電流與飛機飛行時地磁場穿過飛機導電部件的磁通量的單位時間內的變化率成正比,其表達式為:
HEDDY=He[e1cosX(cosX)’+e2cosX(cosY)’+e3cosX(cosZ)’+e4cosY(cosX)’+e5cosY(cosY)’+e6cosY(cosZ)’+e7cosZ(cosX)’+e8cosZ(cosY)’+e9cosZ(cosZ)’]
(e1,e2,…,e9為飛機渦流場在X、Y、Z三個方向及相關作用項上的投影值)。
這樣就可以根據在補償飛行時所測得的飛機在側滾、搖擺和俯仰飛行的三種狀態下的磁場值,以及側滾角Ω、側滾角Ψ、俯仰角λ、地磁傾角Φ和航向角θ的取值,就可以將cosX、cosY和cosZ的數學表達式換算、整理和簡化,并最終得出飛機磁干擾場的系數:飛機的恒定干擾場系數p1 、p2、p3,感應干擾場系數i1、i2 、i3、i4、i5、i6,以及渦流干擾場系數e1、e2、e3、e4、e5、e6、e7、e8、e9共十八項系數。具體計算過程非常復雜,這里不再詳述。當然,對于這些系數的計算,在實際工作中都是將具體的算法編寫成軟件,通過件實時或者事后處理的方法來完成。
2 補償飛行方法
通常的補償方法是在航空磁測的測區附近的地磁場平靜(一般梯度小于10 nT/km),且高度為真高 3 000 m以上的區域內,選取一個邊長 5 km~10 km的正方形閉合框(補償飛行航線),其方向分別與測線平行和垂直,并且在每個邊上飛機做10°左右搖擺(側滾)飛行、5°左右偏航飛行、5°上下俯仰飛行,每個邊的三種動作的順序要一致。每種動作要做 3個~4個周期,并且幅值和周期大小要相同,飛機的飛行速度要與實際測線飛行的地速相同(圖2)。這樣補償飛行結束后,就可以根據補償飛行測得的數據來獲得補償系數,并根據補償系數來獲得干擾場的值,從而得到接近真實的磁總場He數據。
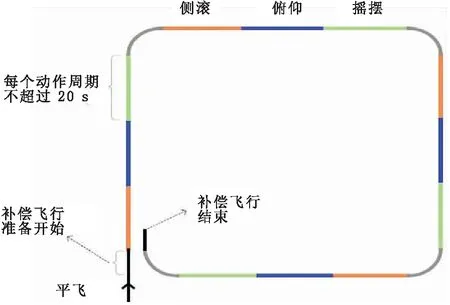
圖2 補償飛行示意圖Fig.2 Calibration flight sketch
3 補償效果的評價指標
補償的效果決定了航空磁測的精度,補償的效果越好,也就是干擾場HTOT的剩余量越小。為了得到干擾場剩余量,就必須在補償后的磁場數據中將真實的磁總場值(也就是背景場)盡可能的剝離掉。一般情況下,周期性的飛機動作,會引起相同頻率的磁干擾場變化,這樣就可以用高通濾波的數據處理方法(圖3)。
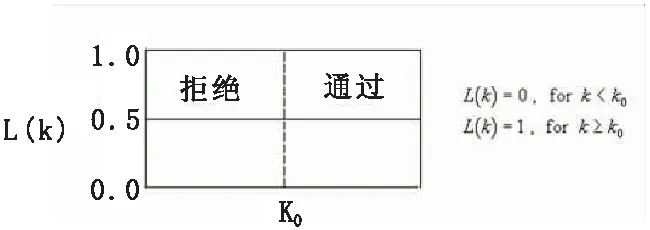
圖3 高通濾波Fig.3 High-pass filter
在圖3 中,K0為截止頻率,高通濾波器僅允許截止頻率大于K0的通過。由于使用高通濾波會產生吉布斯現象,截止頻率選擇過小會使峰位增大,選擇過大又不能有效地突出通帶信號,所以選取合適截止頻率對保留真實的干擾場來說十分重要。在實際工作中所使用的任何一種通用航空飛機(器),完成一種標準補償的動作的一個周期的所用的時間一般在10 s~20 s之間,也就是說飛機的補償動作所引起的磁總場數據變化的頻率會大于或等于1/20。為了保持實際工作中的便利性和嚴謹性,在對補償效果評價時取相對最小值,即設計截止頻率為1/20的高通濾波器,就能將背景場盡可能的剝離掉,并將干擾場數據比較好地保留下來(圖4)。
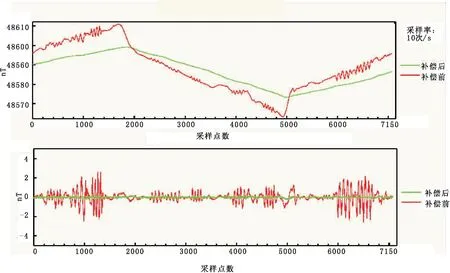
圖4 補償前后磁總場和干擾場對比曲線圖Fig.4 Graph compares total field and disturbing field with compensation
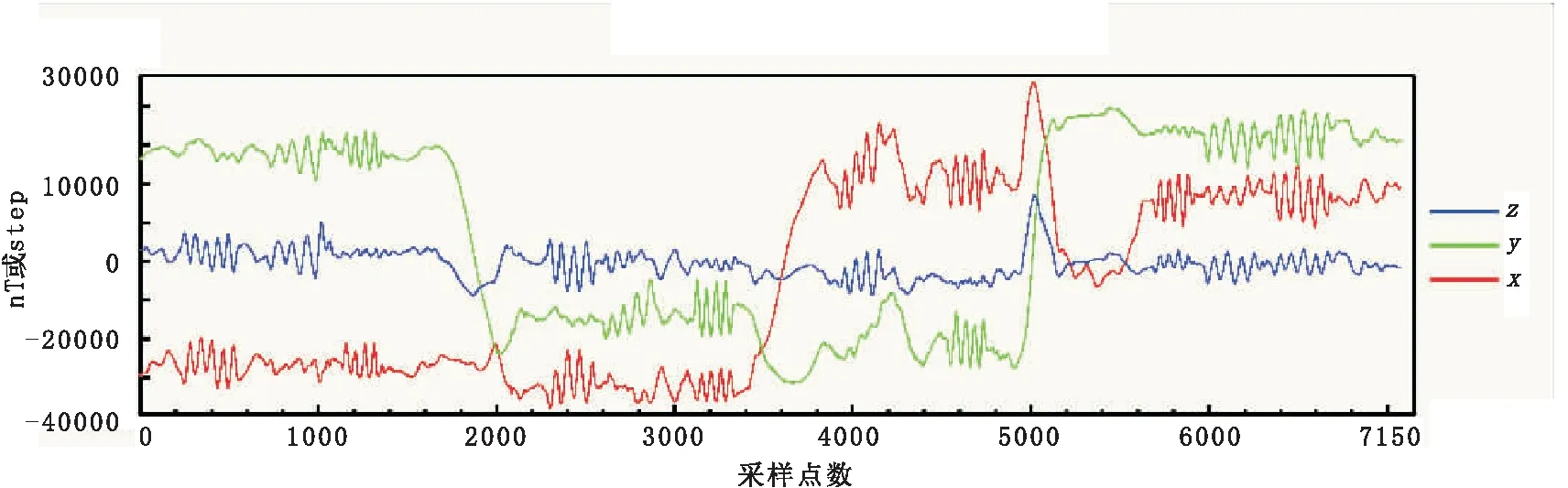
圖5 三分量磁通門磁力儀數據曲線Fig.5 Data curve of three-component fluxgate magnetometer
這樣通過帶通濾波就得到了補償前后的磁總場數據中所包含的磁干擾場數據。評價補償效果的好壞,只需使用一些方法來衡量補償后磁場數據中所包含干擾場剩余量的大小即可。在目前的實際工作共主要使用兩種方法,一種是Fom值(品質因數)和σc(標準差)。
3.1 品質因數
這種評價方法需要提前記錄下或計算出每種動作的開始和結束的時間,并將與動作時間相對應的補償后磁干擾場數據峰的峰值(最大值與最小值之差)計算Fom,我們將其稱之為品質因數。
具體方法是:根據飛行日志提前記錄時間或根據三分量磁通門數據得出每個動作時間段(圖5),在每個時間段上計算出補償前后磁干擾場峰的峰值。因為每條邊都有側滾、俯仰、偏航三種動作,所以Fom值就等于這12個峰峰值之和。補償前后的Fom值的比值,可以作為此次補償飛行的改善率(IR),IR可以用來對相同條飛機和飛行條件下的補償結果的對比。
由三分量磁通門磁力儀數據可以清晰地分辨出每個動作起止時間

其實際意義可以理解為經過補償后,飛機在實際測線飛行時,磁干擾場HTOT對磁總場的影響會遠遠小于 Fom值。根據相關理論和經驗,當Fom值小于2 nT時,補償結果認為是合格。
3.2 標準差
這種評價方法實現起來比較簡單,它是經過高通濾波后,得到補償后磁干擾場數據。σc為標準差的絕對值,其實際意義可以理解為,補償后磁干擾場HTOT數據的離散程度,σc越小磁干擾場的剩余量越小。
同樣也可以對補償前磁干擾場數據計算標準差得出σu,σu和σc的比值是此次補償的改善率(IR),即IR=σu/σc。根據相關理論和經驗,補償結果σc小于0.08 nT為合格。
3.3 兩種指標的對比
這樣通過兩種評指標法都可以非常方便地衡量磁補償的效果,如果指標達不到合格要求,則可以調整航空磁法儀器的安裝方式,或者選擇重飛。但是兩個指標也有一點不足之處,首先對于Fom值來說,需要提前記錄,或者是事后根據三分量磁通門數據推算出每個動作的起止時間,這樣就造成了很大誤差。同時由于任何濾波處理都不是完美的,背景場的數據不可能被完全的去掉,這樣就導致了峰的峰值計算結果偏大或者偏小。
然而對于σc,雖然使用這種評價指標會減少類似計算FOM值時的誤差,甚至一些儀器生產商將σc的計算固化在儀器算法中,很好地杜絕了人為誤差的空間,但是它需要完整地采集整個補償飛行框的補償前后磁總場數據,也就是說需要一圈的完整數據。在飛行方框的拐彎處,飛機動作不能過大,必須保證磁探頭不能進入盲區,否則不能正確得到這個評價指標。
4 結論
補償飛行對于高精度航空磁測來說非常重要,經過補償后磁總場干擾場的剩余量的大小直接影響著磁測的精度。作者認為,使用標準差來作為評價指標時,其計算方法更方便,能更好地用來對補償飛行的數據質量進行監控,更具有可操作性。
致謝
作者在編寫過程中得到我單位紀福山教授大力支持和幫助,在此表示感謝。
參考文獻:
[1] 劉曉杰.航磁補償技術研究[D].吉林大學,2009.
[2] 何敬禮.飛機磁場的自動補償方法[J].物探與化探,1985(6):96-99.
[3] 周佳.恒定磁場環境下飛行器磁干擾的數值分析[D].保定:河北工業大學,2011.
[4] 董鴻燕.基于高通濾波和順序濾波的小目標檢測[J].系統工程與電子技術,2004(5):114-120.
[5] 程乾生.信號數字處理的數學原理[D].石油工業出版社,1979.
[6] 陳天與,徐中信.物探數據處理的數學方法[D].北京:地質出版社,1981.
猜你喜歡
環球時報(2022-05-30)2022-05-30 15:16:57
石油瀝青(2021年4期)2021-10-14 08:50:44
當代陜西(2019年11期)2019-06-24 03:40:28
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
中國教育技術裝備(2015年19期)2015-03-01 02:43:07