迭代尋優的穩健波束形成
2014-06-12 12:15:33王燕吳文峰范展梁國龍
哈爾濱工程大學學報 2014年6期
關鍵詞:信號
王燕,吳文峰,范展,梁國龍
(哈爾濱工程大學水聲技術重點實驗室,黑龍江哈爾濱150001)
迭代尋優的穩健波束形成
王燕,吳文峰,范展,梁國龍
(哈爾濱工程大學水聲技術重點實驗室,黑龍江哈爾濱150001)
針對導向矢量失配程度較大時,常見穩健波束形成算法性能下降問題,提出了一種迭代搜索最優導向矢量的穩健波束形成算法。首先利用修正后的導向矢量構造使波束輸出功率最大的目標函數,分別從干擾抑制和噪聲抑制2個方面推導了新導向矢量應滿足的約束條件。給出了利用矩陣濾波思想構造約束條件的方法并分析其合理性。針對優化問題難以求解的問題,提出了一種迭代尋優的搜索方法,將每次迭代轉化為求解一次二階錐規劃問題。仿真分析表明,相比于常見穩健波束形成算法,該算法有更高的抗導向矢量失配的穩健性,且需要的先驗信息更容易獲取。
穩健自適應波束形成;矩陣濾波器;迭代優化;二階錐規劃;導向矢量
自適應波束形成在無線電通信、聲吶、雷達、醫學成像等領域有廣泛的應用[1]。標準Capon波束形成器(standard Capon beamformer,SCB)[2]是理想條件下陣增益最高的處理器。但是SCB算法是建立在陣列對期望信號響應精確已知的假想基礎上,在實際應用中不可避免存在觀測方向誤差、陣型標定誤差、快拍數有限等條件失配情況,此時SCB算法會將實際期望信號誤作干擾[3-4],導致信號自消現象。基于特征空間的波束形成方法(eigen-space projection,ESP)[5]和對角加載類算法是提升SCB算法穩健性的常用方法。ESP方法需要精確已知信號子空間的維數,且在低信噪比情況下失效。Li等提出的穩健Capon波束形成算法(robust Capon beamforming,RCB)等[6-9]都屬于對角加載算法,但在導向矢量失配程度較大時,這些算法對干擾的抑制能力受到限制[7]。Hassanien等提出的基于二次規劃的穩健波束形成(sequential quadratic programming,SQP)[10]能在給定區間內搜索最優導向矢量,但算法中過多的參數設置使算法的性能很難達到最優。針對標準Capon波束形成器在存在條件失配時,特別是失配程度較大時性能嚴重下降問題,提出了一種迭代尋優的穩健波束形成(iterative optimization robust Capon beamforming,IO-RCB)算法,該算法首次使用矩陣濾波思想構造約束條件,惟一的先驗信息是期望信號可能的入射區間。本文提出的算法可以減小聲吶系統等在實際應用中受環境和條件失配的影響。
1 穩健波束形成算法
考慮M元均勻線陣,陣元間距為半波長,K+1組窄帶平面波(一組信號和K組干擾)從Θ=θ0θ1… θK]方向入射到基陣,信號、干擾與噪聲均互不相關,則基陣接收數據協方差矩陣為
[


式中:w∈CM×1為待優化權值,as為預設導向矢量。針對SCB算法在實際應用中性能下降問題,文獻[6]提出了穩健Capon波束形成方法(RCB)。假設期望信號的真實導向矢量屬于如下不確定集:

則RCB波束形成器可以表述為

式中:C為用戶設定的正定矩陣。RCB算法的性能不僅依賴于導向矢量不確定集的估計精度,且在導向矢量失配程度較大時嚴重退化。
2 迭代尋優的穩健波束形成算法
2.1 目標函數和約束條件的構造
對式(2)中的預設導向矢量作如下修正:

式中:Q∈CM×(M-1)為列滿秩阻塞矩陣,滿足QΗas=0且QΗQ=I;η∈CM-1為待求向量。利用新的導向矢量下,式(2)中的目標函數變為

式(6)中對as+Qη歸一化是為了防止尺度模糊。新導向矢量需滿足如下2個約束:1)在期望信號功率小于干擾功率時不能指向干擾方向,且對干擾的抑制能力不能降低;2)不能放大基陣的噪聲成分,即不能降低對噪聲的抑制能力。下面分別從這2個約束討論,訓練數據中不含期望信號成分且快拍數足夠大時,式(2)中權向量可以寫成[11]

式中:γm(m=1,…M)為Ri+n按降序排列的特征值,滿足γ1≥…≥γK≥γK+1=…=γM,um為對應的特征向量。γmin表示最小的特征值。wSCB對應的波束響應可以表示為式中:a(θ)表示基陣對θ方向的導向矢量;pm(θ)=uΗma(θ)為第m個特征波束,即以第m個特征向量作為加權向量得到的波束響應;ρm=aΗsum可視為調節因子。文獻[11]指出,特征向量是正交的,特征波束間也是相互正交的,且在干擾方向ρm通過調節pm(θ)的大小使ρmum(θ)=aΗsa(θ)。因此wSCB對第k個干擾的響應為

若要保證新導向矢量對應權值對干擾方向抑制能力不降低,必須有

式(10)顯然也可以保證新的導向矢量不會指向干擾方向。
令Θs表示期望信號可能出現的扇面(區域大小和預處理精度有關),Θp表示其補集。若要保證新導向矢量對噪聲不放大,需滿足[10]

由于干擾信號真實方向未知,同時為了全局優化,結合式(10)和式(11)可得式中:δθ表示θ方向噪聲功率的平方根。利用δk和δθ作為加權是為了保證對功率越大的干擾或噪聲的抑制能力越強。利用干擾、噪聲間互不相關,式(12)等價于:

2.2 Rn的構造
本節以矩陣濾波原理[12]為基礎,給出一種適合存在導向矢量誤差時特定區域干擾和噪聲協方差矩陣的重構方法,將Θs扇面設為矩陣濾波器的阻帶,并離散化為θi(i=1,2,…,Ns);同時將Θp設為矩陣濾波器的通帶,并離散化為θj(j=1,2,…,Np)。按阻帶約束通帶最小均方誤差準則,矩陣濾波器優化問題可以表述為
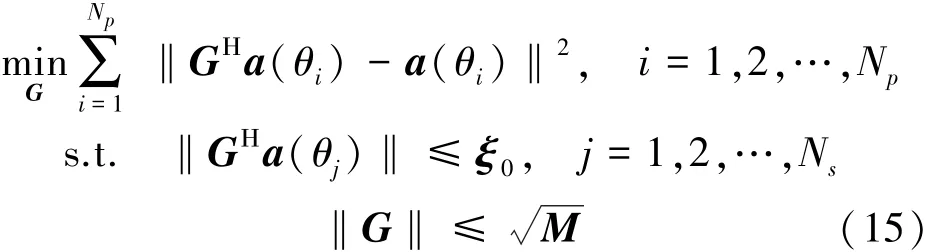
式中:ξ0為人為設定的阻帶扇面內衰減率。式(15)可以轉化為二階錐規劃問題[13]利用Sedumi或CVX等工具箱求解。
現驗證利用式(15)設計的矩陣濾波器對存在導向矢量誤差時的適用性。期望信號導向矢量誤差由觀察方向誤差和隨機誤差組成,而對干擾只需考慮隨機導向矢量誤差,不妨設

式中:θp為觀測方向,Δθ為觀測方向誤差,Δ a0和Δ ak分別為隨機導向矢量誤差。利用Rayleigh商的性質可得

一般導向矢量誤差的范數‖Δ a0‖?‖a(θ0)‖,由式(18)知矩陣濾波器對真實信號仍具有抑制能力。同樣式(19)中‖Δ ak‖?‖GΗa(θk)‖,即第2項對第1項影響較小,矩陣濾波器仍能保證干擾近似無失真通過。綜上存在隨機導向矢量失配時,矩陣濾波器仍具有一定空域的濾波能力,濾波能力和隨機導向矢量誤差范數大小有關。
下面由一個數值仿真說明,考慮12元均勻線陣離散阻帶設定為Θs=[5°∶1°∶15°],通帶設定為Θp=[-90°∶1°∶-5°]∪[25°∶1°∶90°],阻帶衰減設為-30 dB,利用式(15)設計濾波器。
圖1分別顯示理想情況和存在隨機導向矢量誤差時矩陣濾波器幅度響應,其中隨機導向矢量誤差為服從均值為0,方差為δ2I(δ=0.1)復高斯分布。從圖1可以看出存在隨機導向矢量誤差時,阻帶衰減雖減少但仍小于-21 dB,且通帶起伏不超過0.3 dB,這和利用式(18)和式(19)估計結果吻合。
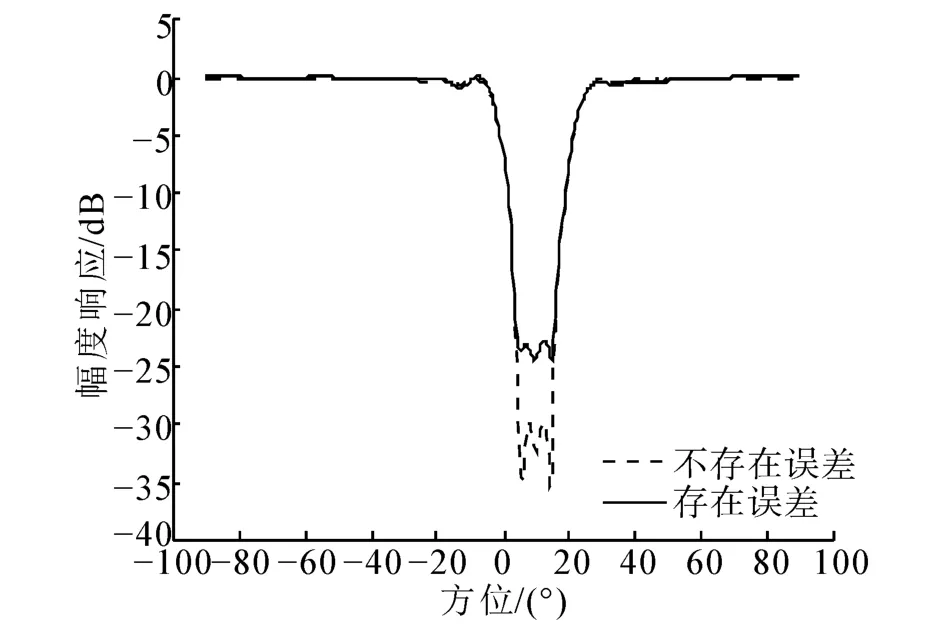
圖1 矩陣濾波器幅度響應Fig.1 Magnitude response of the matrix filter
存在隨機導向矢量失配時,矩陣濾波器仍具有一定的空域濾波能力,因此Θp扇面內的干擾和噪聲協方差矩陣可由下式重構:

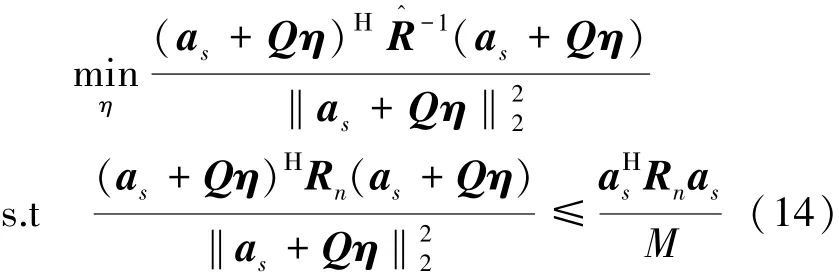
2.3 問題的求解
式(14)無法直接求得最優解,下面給出一種迭代尋優的方法。忽略尺度模糊的影響,則式(14)轉化為

式(21)為二次約束二次規劃問題,易轉化為二階錐規劃問題求解。迭代尋優的具體步驟如下:
1)令上次迭代獲得的最優導向矢量為as,求對應于as的阻塞矩陣Q,并求解式(21)獲得η。
2)對新導向矢量as+Qη進行歸一化

若迭代終止時獲得最優導向矢量為a^s,則IORCB算法權值為
3 仿真分析
為了對比各算法的性能設計了以下幾組實驗。考慮12元均勻線陣,陣元間距為半波長。兩組干擾分別從-30°和35°方向入射到基陣,干噪比分別為20 dB和25 dB,期望信號入射方位在[5°,15°],信號、干擾和噪聲均為互不相關的窄帶隨機過程。對下述方法進行了對比分析:SCB算法、固定對角加載算法FDL、HKB算法[8]、GLC算法[9]、ESP算法、RCB算法和聯合處理SQP算法[10],其中FDL算法固定對角加載量為10倍白噪聲功率,對ESP算法而言假設信號子空間維數精確已知,SQP算法的參數同文獻[10],RCB算法中的不確定集選取為球形且參數ε根據實際情況按文獻[7]計算。所有仿真結果除波束圖外均為200次Monte-Carlo實驗取平均值,κ=10-5,除3.4節外矩陣濾波器設計參數均同2.2節。
3.1 波束圖的對比
考察存在導向矢量失配時,各算法的波束圖(只顯示SCB、RCB和本文方法)。期望信號信噪比為20 dB,入射方向為13°,波束觀測方向為10°,即存在3°觀測方向誤差,隨機導向矢量誤差Δa為服從均值為0、協方差矩陣為δ2I(δ=0.1)的復向量。快拍數取200,RCB算法參數ε=4.3。圖2顯示各算法波束圖,其中垂直虛線表示信號和干擾的實際入射方向。
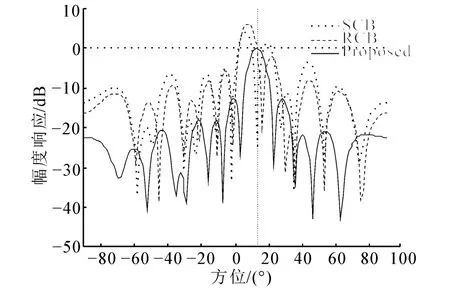
圖2 存在導向矢量失配時波束圖Fig.2 Beam-pattern in the presence of look direction error and random steering vector error
從圖2可以看出RCB算法主瓣峰值未對準實際信號方向,雖然保證了整個不確定集內響應均大于0 dB,但也導致對干擾和噪聲的抑制能力降低。本文算法主瓣峰值自動對準期望信號方位,且干擾零陷深度和對旁瓣的抑制能力高于RCB算法。
3.2 對快拍數不足穩健性的對比
考慮快拍數有限時各算法的性能。期望信號入射方位為10°,信噪比為20 dB,快拍數從12到204以陣元數為間隔變化,暫不考慮其他失配的情況。RCB算法中的參數取0.3 M。
圖3顯示各算法輸出信干噪比隨快拍數變化曲線。從圖3可以看出,當快拍數為1 M時,本文算法的性能略低于RCB算法,但仍高于其他算法。在快拍數大于4 M后,本文算法性能優于其他所有算法。在快拍數較小時本文算法性能相對較低的原因是,由于快拍數不足引起的數據協方差矩陣誤差可以看作由隨機導向矢量誤差引起,快拍數很低時等效的隨機導向矢量誤差較大,正如2.2節中的分析,此時矩陣濾波器的濾波效果受隨機導向矢量誤差限制,因此導致本文算法性能在低快拍時受限。
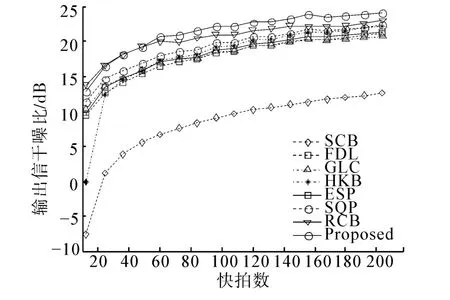
圖3 輸出信干噪比隨快拍數的變化曲線Fig.3 Output SINR versus the number of snapshot
3.3 對觀測方向誤差穩健性的對比
波束觀測方向固定為10°,實際信號入射方向在[5°,15°]以1°為間隔變化,期望信號信噪比為10 dB,快拍數取200,不考慮隨機導向矢量誤差的影響。圖4顯示各算法性能隨觀測方向誤差變化曲線。從圖4中可以看出,隨觀測方向誤差的增加,本文算法和ESP算法的性能幾乎沒有下降,且本文算法的性能優于ESP算法。本文算法對觀測方向誤差穩健性較高的原因在于主瓣能自適應指向信號實際入射方向。
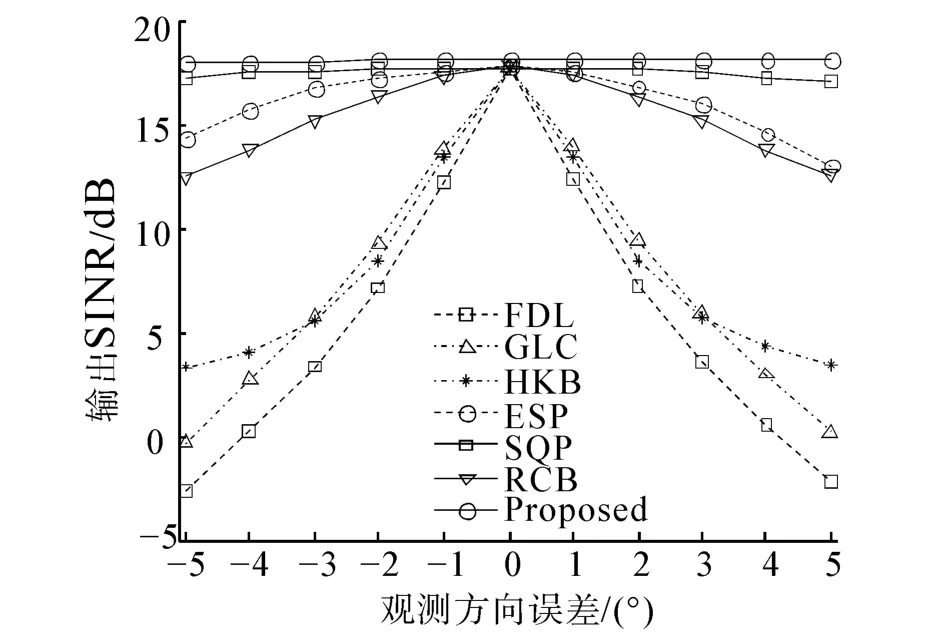
圖4 各算法性能隨觀測方向誤差變化曲線Fig.4 Output SINR versus look direction error
3.4 導向矢量失配對算法性能影響對比
考慮同時存在觀測方向誤差和隨機導向矢量誤差時算法性能。期望信號入射方位為13°,波束觀測方向為10°,隨機導向矢量誤差同3.1節,快拍數取200,RCB算法參數取5。圖5顯示存在導向矢量失配時各算法性能曲線。從圖5可以看出在整個觀測區間內本文算法性能均優于其他算法。
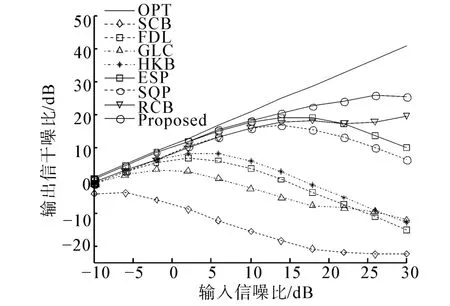
圖5 輸出信干噪比隨輸入信噪比的變化曲線Fig.5 Output SINR versus SNR
3.5 矩陣濾波器參數對算法性能的影響
本節將考察阻帶區域的設置對本文算法性能的影響。實際信號入射方向為13°,且存在3.1節所述隨機導向矢量誤差,快拍數取200。波束指向方位θp=10°,矩陣濾波器的阻帶設置為[θp-α,θp+ α],過渡帶區域間隔設置為10°,阻帶衰減為-30 dB。圖6顯示α取不同值時本文算法的性能。
從圖6可以看出,當實際信號入射方位在阻帶內時,阻帶區域設置越小本文算法的性能越好,α適當偏大對本文算法影響不大。當濾波器阻帶設置小于觀測方向誤差(α=2°時),算法性能在期望信號輸入信噪比較大時略有降低,此時本文算法仍然有效的原因是是矩陣濾波器的過渡帶仍有部分濾波作用。
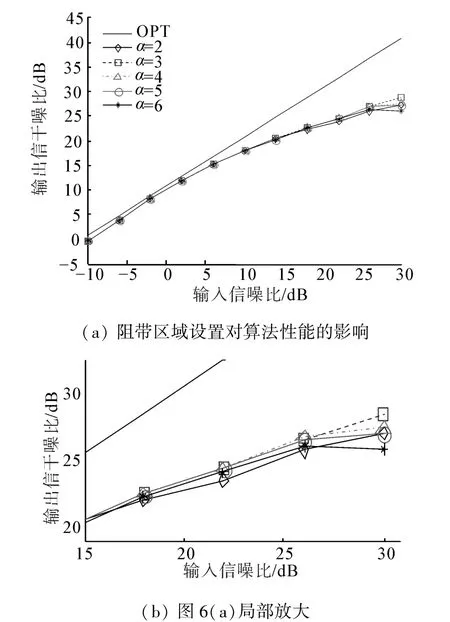
圖6 阻帶區域設置對算法性能的影響Fig.6 The performance of the proposed algorithm under different parameters
5 結論
針對導向矢量失配程度較大時,常見穩健波束形成算法性能下降問題,提出了一種迭代搜索最優導向矢量的穩健波束形成算法。推導了新的目標函數和約束條件,并針對該優化問題難以求解問題,給出了一種迭代尋優解。仿真分析結果表明:
1)本文算法唯一利用的先驗信息是期望信號可能的入射區間,且對先驗信息的精度要求不高,相對于基于不確定集的穩健波束形成算法,該先驗信息較易獲取;
2)存在觀測方向誤差時,本文算法能將主瓣峰值指向實際信號入射方向,對觀測方向誤差有較高穩健性;
3)隨機導向矢量誤差對矩陣濾波器效果有一定影響,但本文算法對隨機導向矢量誤差的穩健性能滿足實際應用需求;
4)和目前較為常見算法相比,本文算法能獲得更高的輸出信干噪比。
參考文獻:
[1]陳陽,惠俊英.聲矢量陣導向最小方差波束形成算法研究[J].哈爾濱工程大學學報,2008,29(11):1199-1204.CHEN Yang,HUI Junying.Acoustic vector sensor array steered minimum variance beamforming[J].Journal of Harbin Engineering University,2008,29(11):1199-1204.
[2]JIN W,JIA W M,YAO M L,et al.Robust adaptive beamforming based on iterative implementation of worst-case performance optimization[J].Electronics Letters,2012,48(22):1389-1391.
[3]武思軍,張錦中,張署.存在指向性誤差時的穩健自適應波束形成算法[J].哈爾濱工程大學學報,2005,26(4):531-535.WU Sijun,ZHANG Jinzhong,ZHANG Shu.Robust adaptive beamforming against pointing error[J].Journal of Harbin Engineering University,2005,26(4):531-535.
[4]劉凱,梁國龍,稽建飛.隨機陣列誤差影響下的聲矢量陣噪聲特性和陣增益[J].哈爾濱工程大學學報,2011,32(5):624-631.LIU Kai,LIANG Guolong,JI Jianfei.Noise characteristics and array gain of an acoustic vector-sensor array influenced by random array errors[J].Journal of Harbin Engineering University,2011,32(5):624-631.
[5]FELDMAN D D,GRIFFITHS L J.A projection approach for robust adaptive beamforming[J].IEEE Transactions on Signal processing,1994,42(4):867-876.
[6]LI J,STOICA P,WANG Z S.On robust Capon beamforming and diagonal loading[J].IEEE Transactions on Signal Processing,2003,51(7):1702-1715.
[7]ZHU LIANG YU,MENG H E.A robust minimum variance beamformer with new constraint on uncertainty of steering vector[J].Signal Processing,2006,86(9):2243-2254.
[8]SELEN Y,ABRAHAMSSON R,STOICA P.Automatic robust adaptive beamforming via ridge regression[J].Signal Processing,2008,88(1):33-49.
[9]JIAN L,LIN D,STOICA P.Fully automatic computation of diagonal loading levels for robust adaptive beamforming[J].IEEE Trans on Aerospace and Electronic System,2010,46(1):449-458.
[10]GU Y J,ZHU W P,SWAMY M N.Adaptive beamforming with joint robustness against covariance matrix uncertainty and signal steering vector mismatch[J].IET Electronics Letters,2010,46(1):86-88.
[11]鄢社鋒,馬遠良.傳感器陣列波束優化設計及應用[M].北京:科學出版社,2009:235-237.
[12]VACCARO R J,CHHETRI A.Matrix filter design for passive sonar interference suppression[J].Journal of the A-coustical Society of America,2004,115(6):3010-3020.
[13]STEPHEN B,LIEVEN V.Convex optimization[M].Cambridge:Cambridge University Press,2004:156-160.
Robust adaptive beamforming based on iterative optimization
WANG Yan,WU Wenfeng,FAN Zhan,LIANG Guolong
(Science and Technology on Underwater Acoustic Laboratory,Harbin Engineering University,Harbin 150001,China)
The performance of common robust adaptive beamforming degrades with the increasing degree of the signal steering vector error.To solve this problem,a robust adaptive beamforming algorithm was proposed on the basis of searching optimal signal steering vectors with an iterative strategy.The objective function that maximizes the beamformer output power was constructed by a corrected steering vector,while the constraint was deduced from both respects of interference suppression and noise suppression.The approach of structuring constraint by using a matrix filter was given and the rationality was explicated.Considering the difficulty in solving the optimization problem,an iterative optimization method was proposed,and the method solved a second-order program problem at each iteration.The simulation results show that,compared with common methods,this proposed method achieves higher signal-to-interference-plus-noise ratios(SINR)in the case of a steering vector mismatch.Moreover,the prior information of this proposed method is easier to extract.
robust adaptive beamforming;matrix filter;iterative optimization;second-order program;steering vector
10.3969/j.issn.1006-7043.201306015
http://www.cnki.net/kcms/doi/10.3969/j.issn.1006-7043.201306015.html
TB566
A
1006-7043(2014)06-0741-06
2013-06-03.網絡出版時間:2014-05-14 15:50:57.
國家自然科學基金資助項目(51279043,61201411,51209059);黑龍江普通高等學校青年學術骨干支持計劃(1253G019);水聲技術國家重點實驗室基金資助項目(9140C200203110C2003).
王燕(1973-),女,教授,博士生導師;范展(1983-),男,博士研究生;
范展,E-mail:wwf@hrbeu.edu.cn.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06