腳掌轉動對腿型機器人起跳影響的研究
2014-05-31 09:46:24王茂林孫天仕高爽
應用科技 2014年2期
王茂林,孫天仕,高爽
哈爾濱工程大學機電工程學院,黑龍江哈爾濱150001
如今,跳躍機器人因優秀的避障能力和非結構性復雜環境的適應能力,越來越吸引研究者的目光和研究興趣[1]。其中帶腳掌腿型跳躍機器人更是因既可動態連續跳躍又可單次跳躍或間隔跳躍的特點,以及較高的仿人度發展尤其迅速。東京工業大學的Masaki Yamakita等研究了仿貓型的腿型機器人,能夠通過蹬墻壁實現較高的跳躍[2]。日本慶應義塾大學的Eijiro Ohashi使用腿型跳躍機器人實現了跳躍高度的控制[3]。但是很多研究中都未考慮腳掌轉動對跳躍的影響。例如楊煜普教授等研究的翻轉跳躍運動機器人,就是典型的帶腳掌的腿型跳躍機器人,但是該研究中沒有考慮腳掌圍繞腳尖的轉動[4]。一些研究也考慮了腳掌轉動的情況,如日本東北大學的Sang?Ho Hyon等研制的四連桿平面體操機器人在動力學建模時就考慮了腳掌的轉動,但對腳掌的轉動對機器人的影響沒有闡述[5]。文中就帶腳掌腿型機器人在腳掌轉動與腳掌不轉動兩種情況進行對比研究,闡明腳掌欠驅動即腳掌轉動對起跳離地前這段跳躍過程的影響。
1 帶腳掌腿型機器人結構
圖1中展示了帶腳掌腿型跳躍機器人的實物模型及其簡化模型。機器人由腳掌、小腿和大腿組成。踝關節和膝關節分別由直流伺服電機驅動。連桿的質量為mi(i=0,1,2),圍繞質心的慣量為Ii。 2 個主動關節分別對應廣義坐標θ2、θ1。起跳離地前,腳掌在兩電機動作下若產生圍繞腳尖的欠驅動轉動,則此轉動的角度定義為θ0。所以定義機器人系統的廣義坐標為θ2、θ1、θ0。 模型總質心為(xc,yc)。
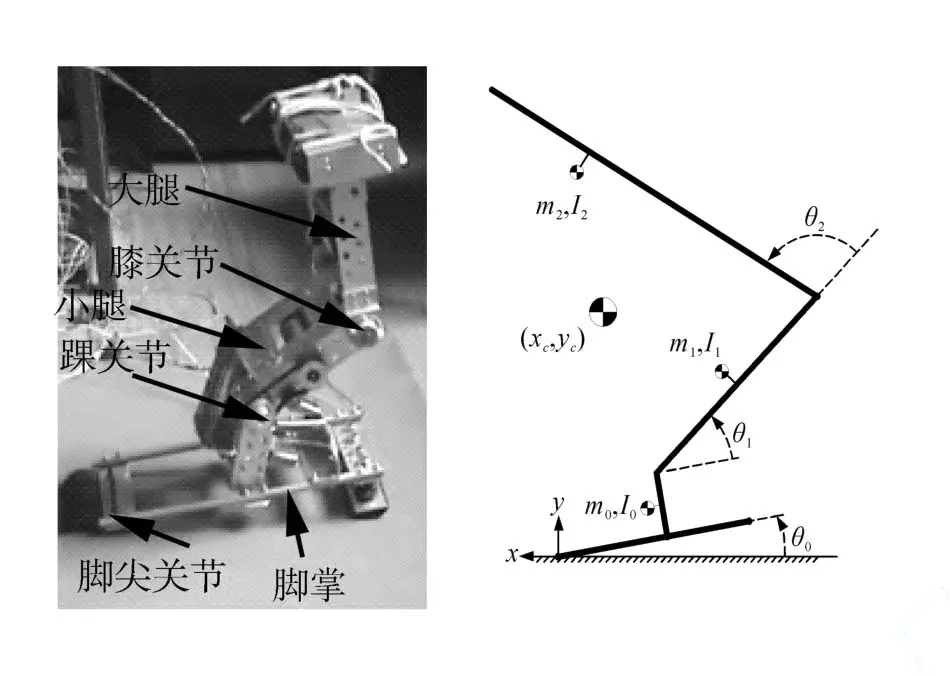
圖1 腿型機器人模型圖片和其簡化模型
2 腳掌不轉動起跳與腳掌轉動起跳
在腳掌轉動情況下,機器人從初始時刻t1開始到t2時刻機器人關節彎曲實現下蹲,這一過程中腳掌與地面始終接觸且不滑動,稱為站立相。然后關節伸展達到t3時刻的起跳離地姿態。這一過程腳掌圍繞腳尖轉動且腳尖不滑動,稱為欠驅動相[6],如圖2所示。
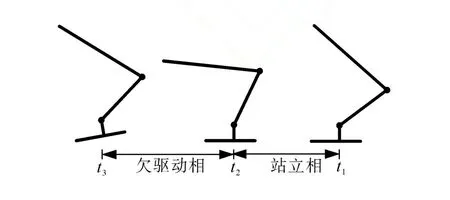
圖2 腳掌轉動時的起跳序列
圖3展示了在腳掌不轉動情況下,機器人從靜止到起跳離地前的起跳序列。因為文中研究腳掌轉動與否對起跳離地前這段跳躍的影響,所以規定其從開始到起跳離地與腳掌轉動耗時相同,均為t1到t3。此過程從初始時刻t1開始,機器人關節彎曲實現下蹲動作,然后關節伸展達到t3時刻的起跳離地姿態。起跳時腳掌水平地抬離地面,這一過程中腳掌始終與地面接觸,腳掌沒有轉動現象。
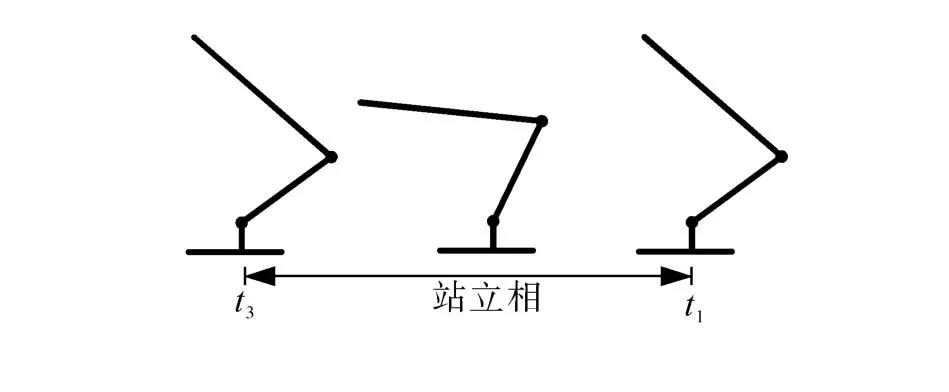
圖3 腳掌不轉動時的起跳序列
3 腿型機器人動力學分析
腳掌不轉動時只有θ2、θ1這2個廣義坐標,腳掌轉動時有3個廣義坐標θ0、θ1、θ2。 雖然兩種情況下廣義坐標數目不同,但是腳掌轉動情況下令θ0=0即可適用于腳掌不轉動情況,因此選用廣義坐標為q=[θ0,θ1,θ2]T。 運動拉格朗日動力學方程得到機器人的動力學方程描述:

上述方程中τ=[0,τ1,τ2]T。 踝關節和膝關節力矩分別為τ1和τ2。F=[Fx,Fy]T是表示機器人受到地面的水平摩擦力和垂直反力。方程中慣性矩陣D3×3與科氏矩陣C3×3均為對稱矩陣。
4 起跳過程中的約束
4.1 腳掌不轉動情況的起跳約束
(2)起跳時腳掌與地面之間沒有相對滑動,所以有:

其中μs是靜摩擦力系數。
由ZMP穩定性理論知機器人與地面的力必須作用于腳掌的支撐區域中。因而有約束:

水平方向ZMP的坐標求解公式為
其中M為總質量,xc為總質心的x方向坐標,ay為總質心在鉛垂向的加速度,為圍繞腳掌處的角動量的微分[7]。
(3)要求質心CoM的起跳方向,即:

(4)受到電機機械特性約束為
其中ki是電機轉矩常數,ke是速度常數,n為減速器減速比,R是電機線圈電阻,U是輸入的電壓。
4.2 腳掌轉動情況的起跳約束
前面講述了腳掌不轉動起跳的約束條件。這里對腳掌轉動起跳與腳掌不轉動起跳的異同做出說明。
相同點:初始姿態的約束(1)、地面作用力約束(2)、起跳方向約束(3)以及電機機械特性的約束(4)對腳掌轉動方式起跳都適用。
不同點:因腳掌轉動,所以約束(2)、(3)和(4)計算時需要計入θ0(t)的影響。
用算符Γ代表θ0和θ1、θ2的函數關系,表示為

方程(8)可以由動力學方程解耦獲得[8]。
5 關節的軌跡規劃
兩種起跳方式的軌跡規劃方式是相同的,均以電機能耗最小為優化目標,所以對腳掌轉動與不轉動時起跳的軌跡解算做統一闡述。因為電機的能耗與電流平方成一定比例關系,而電流與電機力矩又成一定線性關系,所以能耗定義為:

關節軌跡θ1(t)、θ2(t) 用五階多項式來描述為:

其中(i,j)= (1,2),(2,3),h(t)= [1t t2…t5]T。 由動力學方程(1)可以解算

將式(11)帶入式(9)中即可得到優化目標[9]。
6 仿真和實驗
機器人結構參數示意圖和部分參數如圖4和表1所示。

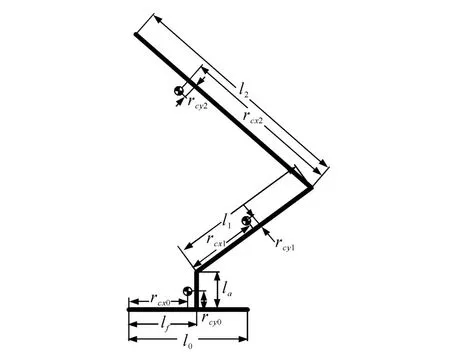
圖4 機器人結構參數示意圖
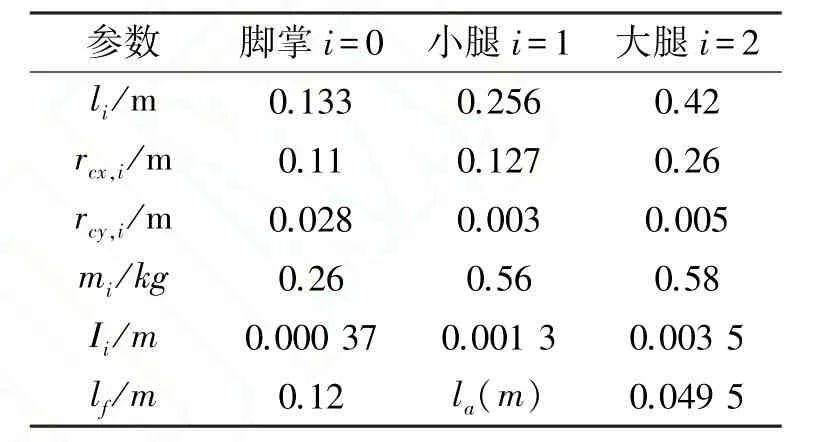
表1 機器人結構參數
6.1 腳掌不轉動情況下的仿真和實驗結果
機器人在腳掌不轉動情況下起跳的仿真時序圖如圖5(a)所示,質心的時序圖如圖5(b)所示。根據圖5(a)得知,機器人先下蹲,然后快速站起,達到起跳效果。由圖5(b)得知確實沒有滿足起跳角45°的約束,優化的最小起跳角度為56°左右。
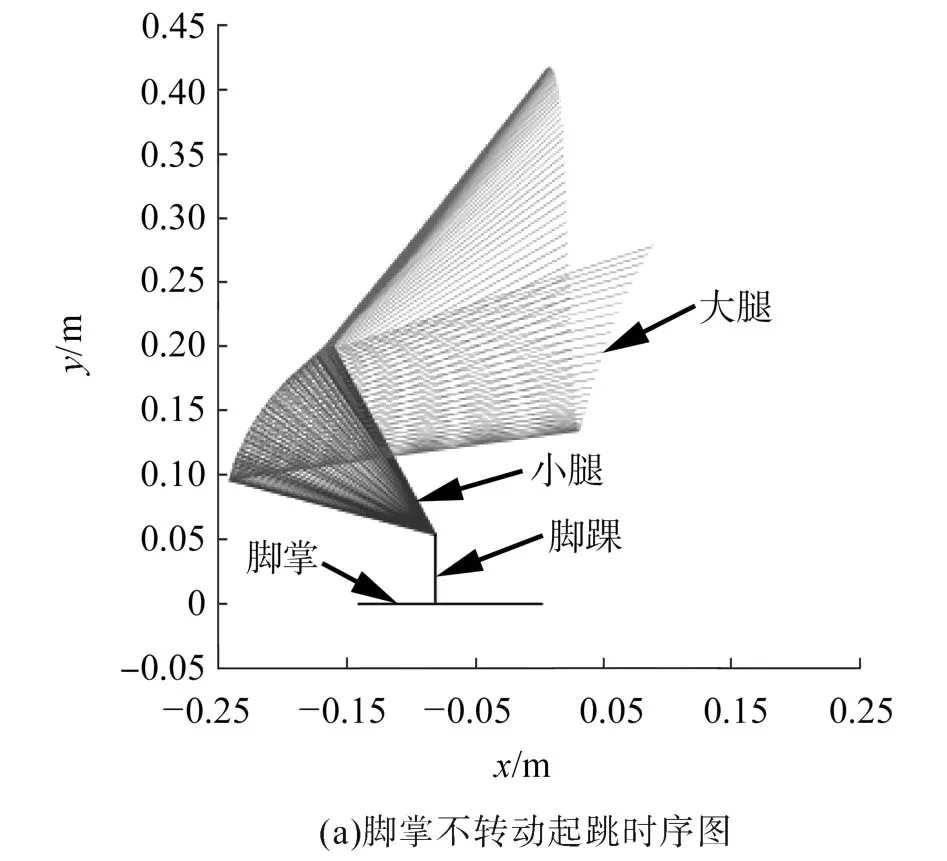
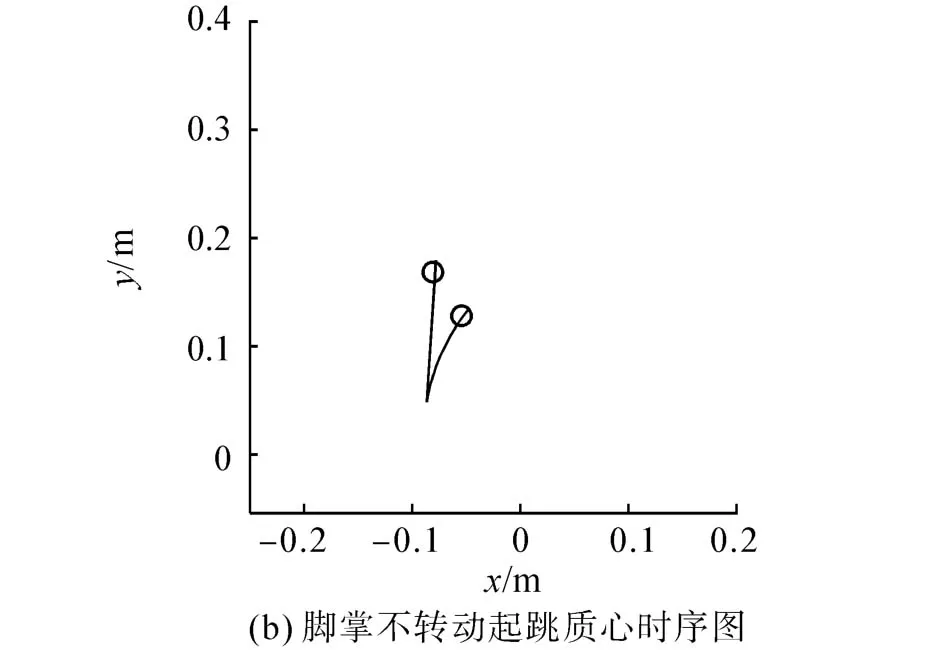
圖5 腳掌不轉動起跳仿真
將以上仿真結果應用于實驗,腳掌不轉動起跳時的實驗結果展示如圖6所示。

圖6 腳掌不轉動起跳實驗圖片
腳掌不轉動情況下起跳的踝關節電機和膝關節電機的力矩曲線如圖7所示,從中可以看到電機不僅在質心由低抬高時力矩較大,而且在機器人下蹲,質心下降時也需要較大的力矩。根據式(9)可知,在整個起跳過程中對圖7中兩個關節的力矩進行平方再積分,可以得到的能耗為W=3.31(N2·m2·t)。
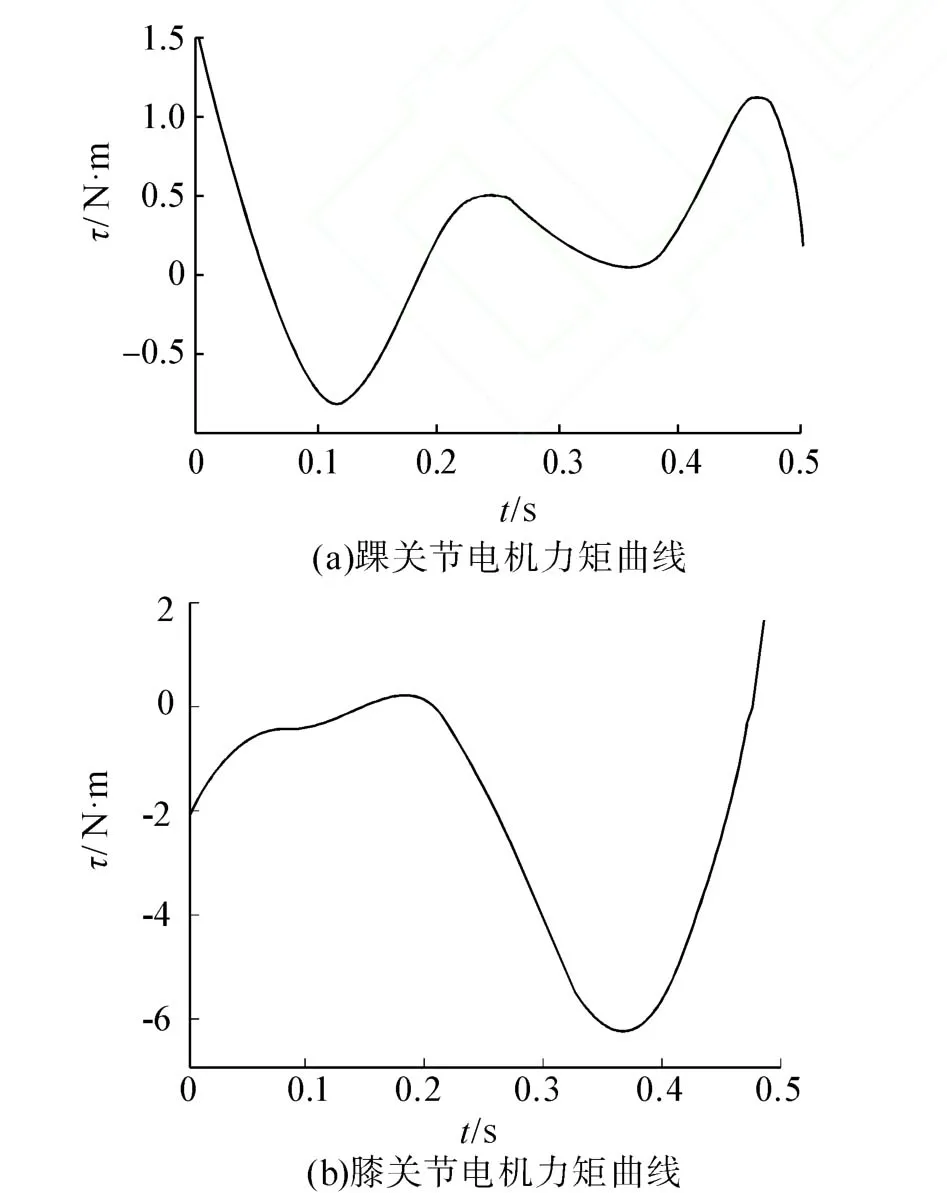
圖7 腳掌不轉動起跳關節力矩曲線
6.2 腳掌轉動情況下的仿真和實驗結果
機器人在腳掌轉動情況下起跳的仿真時序圖如圖8(a)所示,質心的時序圖如圖8(b)所示。根據圖8(a)得知機器人先下蹲,此時機器人開始圍繞腳尖轉動,然后快速站起,達到起跳效果。由圖8(b)知機器人起跳角度為45°。

圖8 腳掌轉動起跳仿真
將以上仿真結果應用于實驗,腳掌轉動起跳時的實驗結果如圖9所示。
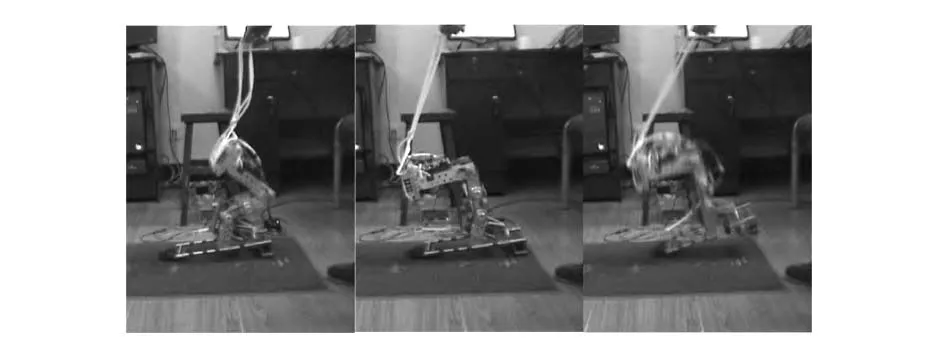
圖9 腳掌轉動起跳實驗圖片
腳掌轉動情況下起跳的踝關節電機和膝關節電機的力矩曲線如圖10所示,從中可知在機器人下蹲時力矩曲線相對平緩,能耗較少。在質心抬升,機器人向上起跳時,膝關節和踝關節電機快速動作,此時消耗了機器人腳掌轉動起跳時的大部分能量。根據式(9)可知,在整個起跳過程中對圖10中兩個關節力矩進行平方再積分,仿真得到整個起跳過程的能耗為W=1.25(N2·m2·t)。
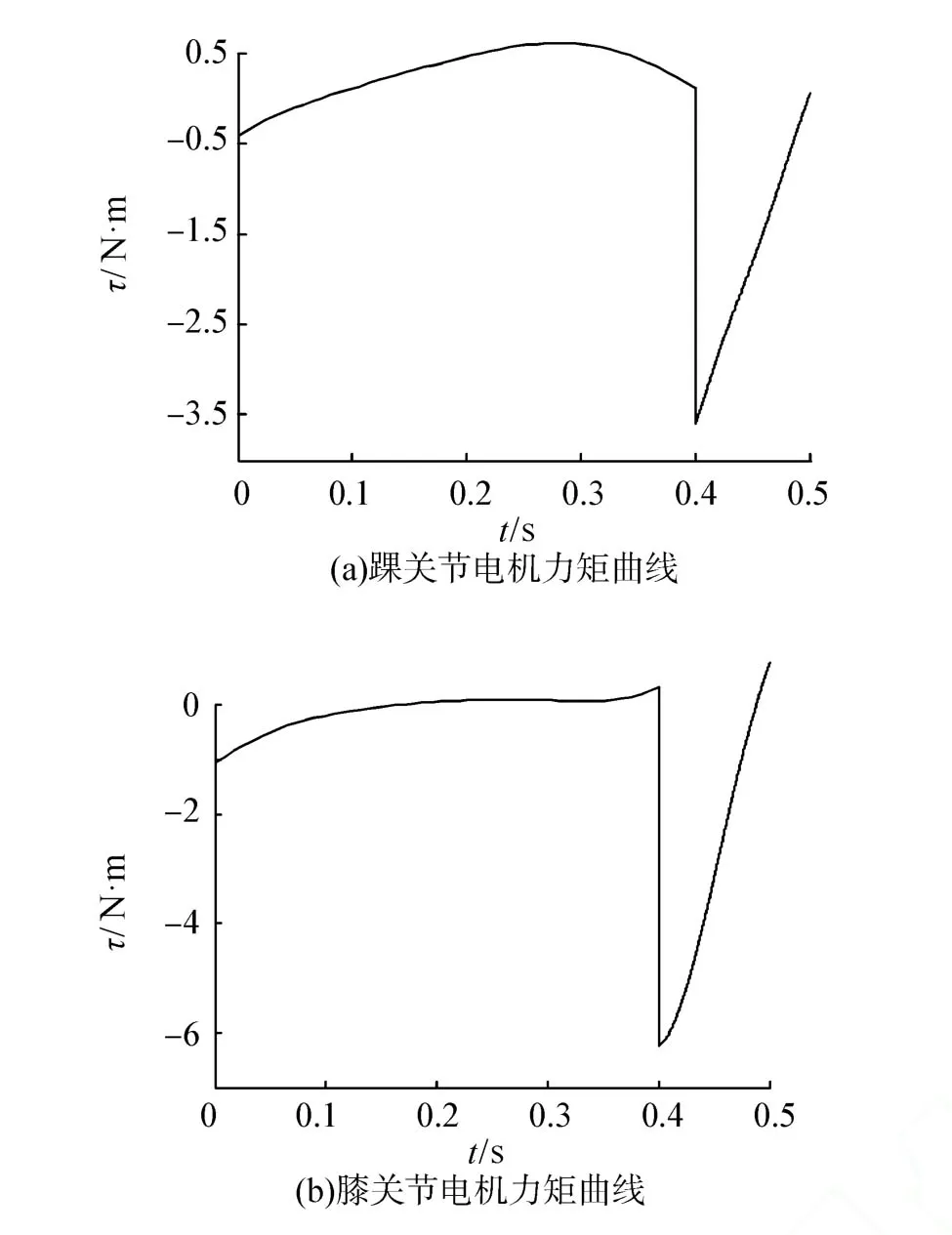
圖10 腳掌轉動起跳關節力矩曲線
腳掌轉動情況下起跳的踝關節電機和膝關節電機的力矩曲線如圖10所示,從中可知在機器人下蹲時力矩曲線相對平緩,能耗較少。在質心抬升,機器人向上起跳時,膝關節和踝關節電機快速動作,此時消耗了機器人腳掌轉動起跳時的大部分能量。根據式(9)可知,在整個起跳過程中對圖10中兩個關節力矩進行平方再積分,仿真得到整個起跳過程的能耗為W=1.25(N2·m2·t)。
4 結束語
文中制作了一款帶腳掌的腿型機器人,建立了機器人在腳掌轉動與不轉動兩種情況下起跳時的動力學方程,分析了兩種情況下的起跳約束。以電機能耗最小為優化目標,對兩種情況起跳進行軌跡優化。使用實際模型數據分析,仿真得到了兩種情況下在起跳時的時序圖、總質心時序圖、力矩曲線以及能耗值。仿真結果表明:帶腳掌的腿型機器人起跳時腳掌轉動比腳掌不轉動消耗的能量少,而且起跳角度范圍也更寬。
[1]徐兆紅.腿式跳躍機器人運動規劃與穩定性恢復研究[D].上海:上海交通大學,2009:2?20.
[2]MASAKI Y, YASUHITO O, YASUAKI T.Jumping cat ro?bot with kicking a wall[J].Journal of the Robottics Society of Japan, 1994, 9(6): 934?938.
[3]EIJIRO O, KOUHEI O.Hopping height control for hopping robots[J].Electrical Engineering in Japan.2006, 155(1):64?71.
[4]楊煜普,耿濤,郭毓.一種新型翻轉跳躍運動機器人的運動結構與軌跡規劃[J].上海交通大學學報,2007,37(7): 1110?1113.
[5]SANG H H, EMURA T.Quasi?periodic gaits of passive onelegged hopper[C] //Proceedings of the 2002 IEEE /RS J International Conference on Intelligent Robots and Systems.Piscataway, USA: IEEE, 2002, 2625?2630.
[6]WU Tingying, YEH T J, HSU BingHung.Trajectory Plan?ning of a one-legged robot performing stable hop[C]//In?ternational Conference on Intelligent Robots and Systems.Taipei, China, 2010, 4922?4927.
[7]梶田秀司.仿人機器人[M].北京:清華大學出版社,2007: 61?90.
[8]薛定宇,陳陽泉.高等應用數學問題的 MATLAB求解[M].2 版.北京:清華大學出版社,2008: 184-185,220?234.
[9]黃孝亮.一類欠驅動步行機器人運動學動力學分析及控制算法研究[D].長春:吉林大學,2009:10?20.
