民航發動機狀態監測點故障檢測方法研究
2014-05-25 00:34:21陳維興王雷孫毅剛沈龍云
自動化儀表 2014年9期
陳維興 王雷 孫毅剛 沈龍云
(中國民航大學航空自動化學院1,天津 300300;中國民航大學基礎實驗中心2,天津 300300;中國中材裝備集團有限公司3,天津 300400)
民航發動機狀態監測點故障檢測方法研究
陳維興1王雷2孫毅剛1沈龍云3
(中國民航大學航空自動化學院1,天津 300300;中國民航大學基礎實驗中心2,天津 300300;中國中材裝備集團有限公司3,天津 300400)
民用航空器上發動機的安全性,主要依靠發動機配載的諸多監測點實現發動機狀態監測。采用相應的方法對民航發動機狀態監測點出現的故障進行診斷。硬故障采用分階段閾值的方法診斷,依據飛機油門桿角度的不同劃分飛行階段,分別設定各階段相應的檢測閾值;軟故障由于其變化的特殊性和緩慢性,選擇BP神經網絡建立正常發動機監測點模型,通過對比正常運行時的數據圖形和實際運行的圖形,判斷其是否出現故障。經仿真,硬故障診斷的檢測閾值能夠很好地包含各個階段監測點的正常運行狀態輸出, BP網絡對于軟故障也能夠比較清晰準確地反映其實際工作狀態。
民航發動機 狀態監測 故障診斷 智能控制 WinCE 殘差分析 BP網絡
0 引言
發動機類似航空器的“心臟”,是整個航空器結構中最重要的部分,其直接決定航空器能否安全運行[1-3]。發動機控制系統建立在其各類工作狀態反饋數據的基礎上,這些參數均來自發動機配載的狀態監測點群,即傳感器組的直接反饋。為保證發動機狀態監測數據的準確性,首先要確保監測點的正常穩定,這一點可以利用其自身輸出數據來驗證[1]。由于傳感器組的工作環境惡劣、分布廣泛且安裝部位特殊等原因,使其成為最容易發生故障的發動機組件之一[1-4]。
監測點故障大致分為“軟故障(soft fault,SF)”和“硬故障(hard fault,HF)”。“硬故障”是傳感器在短時間內突然發生的比較容易識別的損壞和完全失效,這種故障是比較容易識別的。“軟故障”是指傳感器參數的緩慢漂移,由于這是一種參數的緩慢變化,所以“軟故障”的診斷是比較困難的。
傳感器故障的研究一般采用卡爾曼濾波,即建立發動機傳感器故障檢測、隔離與重構[4-9],對傳感器的故障進行全面檢測,不會特別地區分硬故障和軟故障。這些方法只能夠檢測出傳感器故障,而并沒有對故障分類。本文針對軟故障和硬故障這兩種故障類型,分別設計檢測方案并進行仿真驗證。
1 硬故障檢測邏輯和方法
針對發動機監測點的硬故障檢測,目的在于確定一個具體的傳感器信號的有效性,可以采用帶有一定閾值的“Min-Max”檢測方法。即依據傳感器正常運行時的輸出信號,選擇最大值Smax和最小值Smin,然后加上或者減去一個相應的閾值σ,作為傳感器正常運行時的檢測值。當傳感器的輸出數值超出所規定的閾值時,則說明傳感器出現硬故障。過程如下列公式表示。
S表示監測點傳感器正常工作時的輸出值,則:

σ為傳感器正常運行的整個階段的標準差,即:

式中:Si為傳感器在整個發動機運行過程中的輸出監測數據;i為傳感器數量,且i∈[1,n];為整個過程中傳感器輸出數據的平均值。
則硬故障檢測方法為:

當監測點發生硬故障時,其輸出可能會大大超出正常值或者輸出的數值為零。因此,設置一個檢測的上下限閾值來對其進行檢測,完全能夠快速準確地檢出故障。
民用航空器飛行過程可分為:滑行、起飛、爬升、巡航、下降、進近、著陸等若干階段。在每個不同的飛行階段,發動機的各個部分的工作過程存在較大區別,因此同一參數監測點傳感器的輸出數據也存在著較大差距。飛行階段劃分依據如圖1所示,圖1(a)反映了發動機油門桿角度在整個飛行階段的監測數據變化趨勢,圖1(b)反映了飛行海拔高度的監測數據變化趨勢,在不同飛行階段之間轉換時,監測點數值變化較為明顯。據此,若檢測硬故障時針對某監測點進行整個飛行過程的平均值和標準差計算,則在不同飛行階段之間會有很大的偏差。
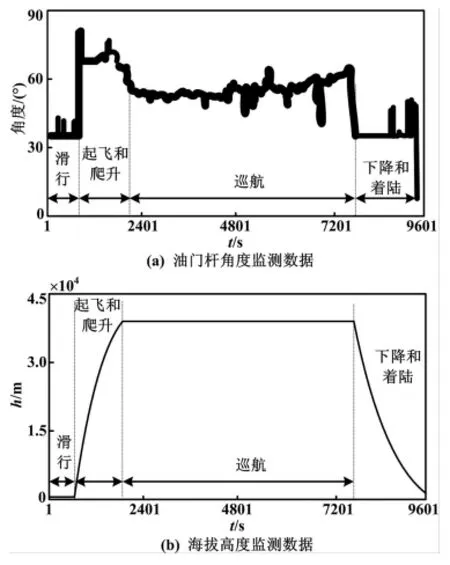
圖1 飛行階段劃分依據Fig.1 Dividing basis of the flight phases
綜上所述,發動機監測點硬故障檢測應先將傳感器輸出數據按照飛行階段分類;然后逐類分別計算相應的閾值,并對傳感器故障進行檢測和診斷。
本文利用某一特征性監測點數據對飛行過程進行分類。由圖1(a)可見,隨著飛行階段的變化,各個階段之間轉換需要的動力不同,其油門桿角度監測值的變化非常明顯的。這是由于需要調節油門桿以控制發動機的輸出動力,因此可以依據油門桿的角度來劃分不同飛行階段。表1列出了某型民航客機在不同飛行階段對應的油門桿角度。
根據上述分類方法以及傳感器硬故障閾值計算方法,可以計算出發動機監測點狀態參數在不同飛行階段的故障檢測閾值。不同飛行階段下發動機低壓轉子轉速(N1)以及燃油流量(fuel flow,FF)監測點的硬故障檢測閾值如表2和表3所示。
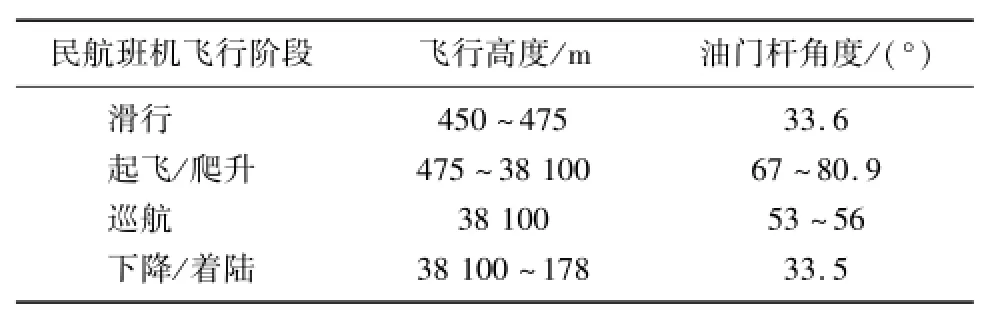
表1 基于油門桿角度數據對飛行階段分類Tab.1 Classification of flight phases based on TLA data
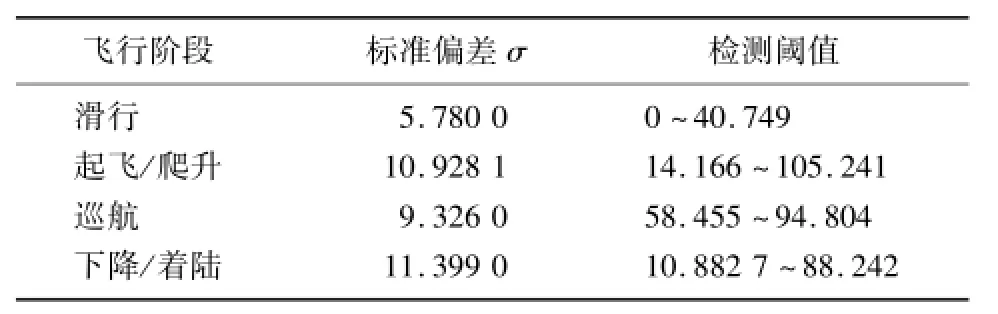
表2 N1檢測閾值計算與設計表Tab.2 The calculation and design of detection threshold for N1
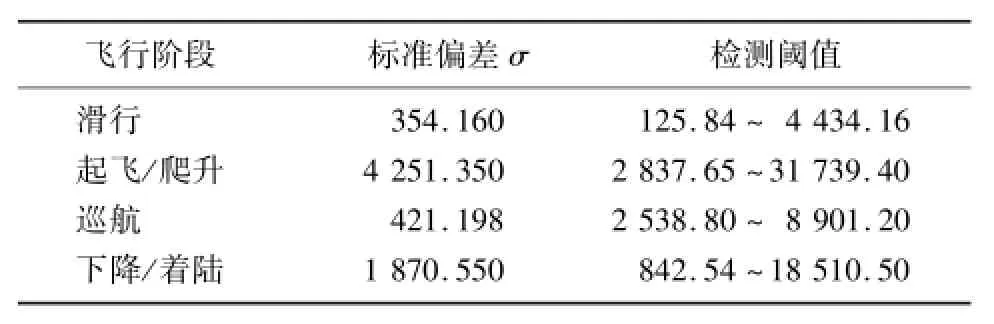
表3 FF檢測閾值計算與設計表Tab.3 The calculation and design of detection threshold for FF
采用歸一化計算方法,利用油門桿角度做為特征性監測點數據,對飛行過程進行分段。分段結果表明,在不同飛行階段下不同監測點數據呈現出“階躍”式變化,與飛行階段的劃分十分吻合。由此可見,對于不同飛行階段采用不同的閾值進行故障識別,更能夠準確、快速檢測發動機監測點的硬故障。
2 軟故障檢測邏輯和方法
相對硬故障(HF),發動機監測點的軟故障(SF)較難檢測,原因主要有以下兩點。
①由于軟故障耦合在監測點數據隨時間緩慢變化的過程中,其特征值不如硬故障閾值明顯。
②軟故障復現性不明顯,不會每次都體現在發動機監測點輸出數據中,具有“隱晦”特征,無法像硬故障那樣明確界定。在發動機實際維修工作中,所謂的“不可重復”故障就可能含有傳感器軟故障。
如何能夠根據傳感器輸出數據,快速準確地判斷傳感器是否出現軟故障。一些針對于傳感器軟故障的研究方法,如對多傳感器進行的檢測、隔離[1],同樣沒有給出單傳感器故障診斷的具體模型,因此,軟故障檢測成為傳感器故障診斷研究的重點和難點[2-3]。BP神經網絡是對傳感器軟故障診斷的有效工具。
影響發動機工作狀態的還有發動機工作時的外界環境條件,包括飛行高度、飛行馬赫數以及外界大氣的壓力和溫度。這些參數是發動機不可控制的輸入,被稱為可測的干擾參數。現行的發動機狀態關注的是發動機流量(FF)、低壓轉子轉速(N1)、高壓轉子轉速(N2)、發動機排氣溫度(engine temperature,EGT)、放氣活門開度(vent bleed valve,VBV)、壓氣機可調靜葉角度(compressor variable stator vane,CVV)。采用神經網絡技術,建立發動機傳感器正常運行時的模型。每次飛行結束之后,先將飛行數據輸入到建立的模型之中,計算估計傳感器的正常運行數值,并與實際的運行數值對比,得出兩者之間的殘差對比;然后依據所得的殘差曲線分析判斷傳感器是否出現軟故障。
經算法驗證的可檢測的發動機監測點軟故障以及作為參數估計樣本的發動機監測點如表4所示。
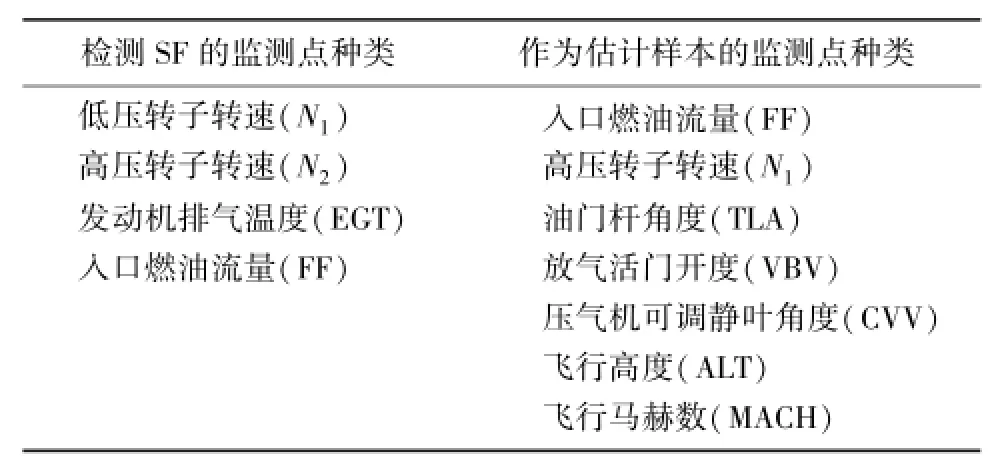
表4 軟故障檢測網絡的I/O節點Tab.4 I/O nodes of the network for soft fault detection
表4主要對N1、N2、FF和EGT這4個監測點進行軟故障檢測,神經網絡輸入層節點選用6個發動機監測點輸出參數。對于N1、N2和EGT這3個監測點軟故障檢測網絡,選擇FF、海拔高度(altitude,ALT)、馬赫數(mach number,MACH)、油門桿角度(throttle lever angle,TLA)、CVV和VBV作為輸入層節點;對于FF監測點軟故障檢測網絡,用N1替換FF作為輸入層節點即可。
考慮發動機維護的實際操作環境,基于Intel PXA255的ARM XScale設計了嵌入式硬件平臺,可做手持離線檢測或機載在線監測。其主要參數為:RISC架構,2個LAN接口,4個COM端口,4個DIO端口,CPU(PXA255)主頻200 MHz,64 MB SDRAM內存和32 MB Cache,1 GB CF卡數據存儲,工作環境溫度0~70℃,移植WinCE 5.0系統。
由于嵌入式平臺的CPU、內存資源受限,神經網絡采用BP3層網絡結構。為了加快網絡的計算速度,輸出層只有一個輸出單元。中間層節點的選取則要依據相應的選擇規則,一般是輸入參數的兩倍,經過計算和測試,最終確定中間層為11個節點。
軟故障處理流程和建立的BP網絡模型如圖2所示。圖2(a)為轉故障處理流程,圖2(b)所示為N1、N2、EGT的訓練模型。對于FF的訓練模型,則將N1訓練模型中輸入節點中的FF與輸出N1位置互換即可。
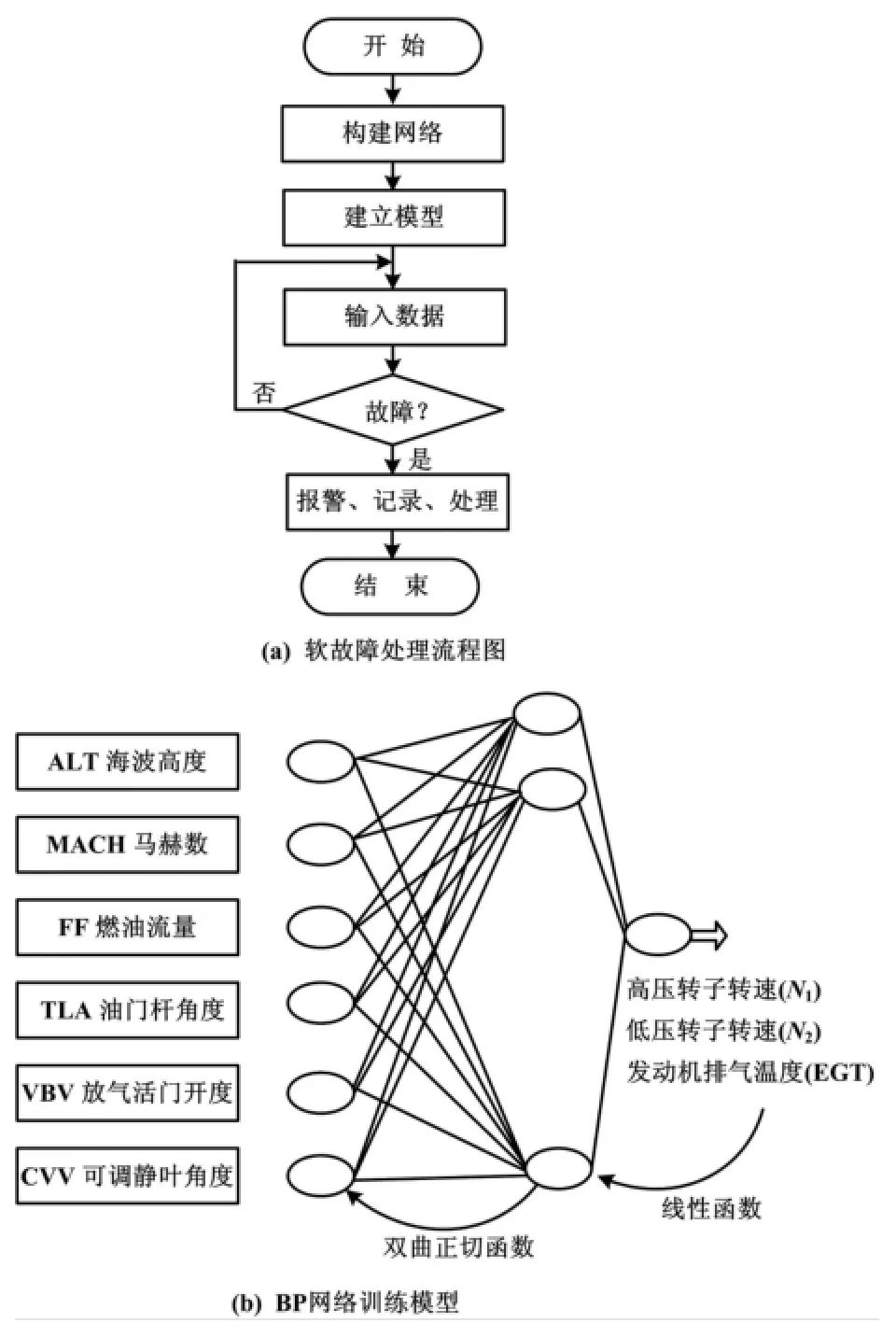
圖2 軟故障處理流程及BP網絡訓練模型Fig.2 Flowchart of SF processing and BP network training model
利用Matlab中的神經網絡工具箱,根據圖2所示的BP網絡設計,選擇相應的參數和數據進行繪圖對比。對于N1和N2進行網絡訓練的Matlab仿真結果如圖3所示。
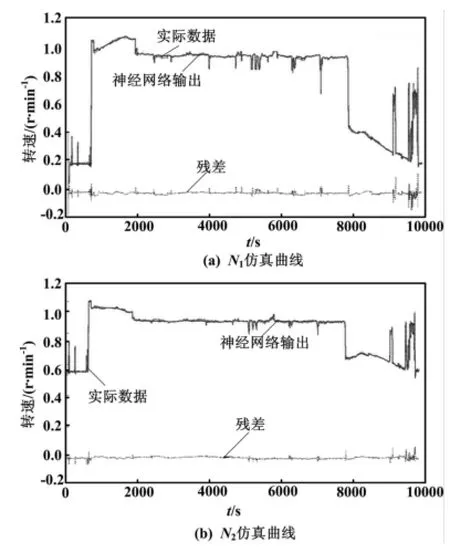
圖3 Matlab仿真結果Fig.3 Simulation results of Matlab
由圖3可見,監測點數據的BP神經網絡的訓練結果(估計值)與實際正常運行數據(采集值)十分吻合、殘差微小,兩者殘差值為正常運行數據值的0.02%~0.5%區間內。分析形成較大殘差的原因是飛行階段的變化引起數據發生較大變化,即飛行階段臨界點的估計誤差較大。
由于本文所述SF_BP3算法的最終目的是應用于實際生產,而Matlab所需硬件資源很大且計算耗時較長,達不到實際運行的要求,因此使用C++語言重新開發嵌入式SF_BP3程序。BP網絡訓練流程圖如圖4所示。
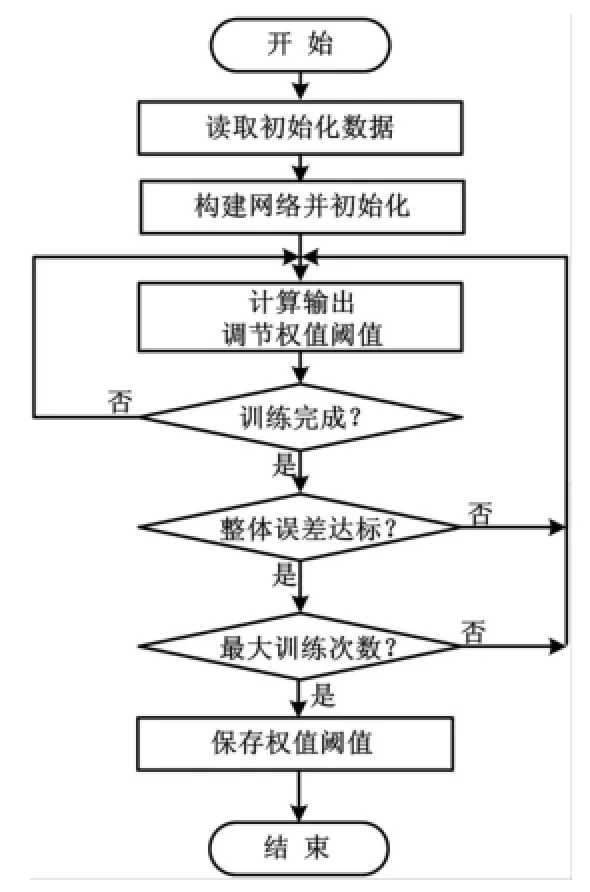
圖4 BP網絡訓練流程圖Fig.4 Flowchart of BP network training
使用C++語言編寫時,要對BP網絡做一些修改。BP網絡的隱藏層和輸出層的各個節點均有一個閾值輸出,以調整BP網絡的輸出,使得初始化參量以及調整變量都增加,而且要增加額外的計算量。因此,網絡在設計時,在輸入層和隱藏層均各增加一個節點作為偏置單元,初始值為1。這個偏置單元與其他節點一樣作為下一層的各個節點的一個輸入變量進行計算,從而作為下一層節點的閾值。但是兩個偏置單元之間不存在聯系。
在此驗證使用C++編寫的SF_BP3程序的準確性。
N1和N2的訓練仿真對比結果如圖5所示。
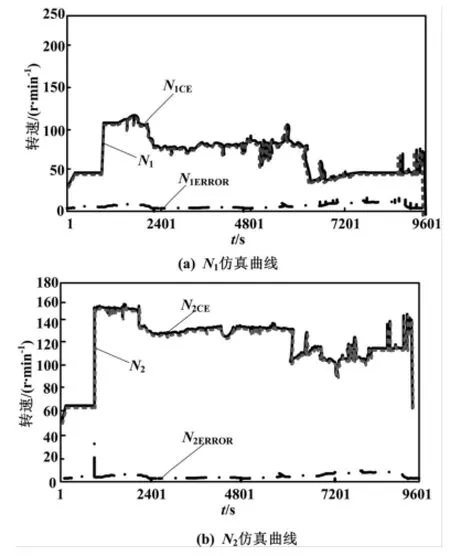
圖5 模型仿真結果Fig.5 Simulation results of the model
圖5中,曲線N1和N2為監測點實際運行采集數據曲線,曲線N1CE和N2CE為SF_BP3訓練結果(估計值)曲線,曲線N1ERROR和N2ERROR為低壓轉子轉速N1和高壓轉子轉速N2的殘差值曲線。
由圖5分析,訓練曲線和實際運行曲線之間的契合度非常高。雖然在某些特殊時刻,如飛行階段臨界點,殘差值較大,但BP網絡在運行時會記住這種變化,在之后的訓練結果之中就基本不會再次出現。因此可驗證SF_BP3的仿真效果明顯,對于監測點軟故障的診斷具有較高的準確性。
經測試,在對一次中等飛行距離記錄的發動機監測點數據進行故障監測時,在普通PC機上采用Matlab運算SF_BP3需要2 min左右;而采用C++編寫的程序只需要1~2 s;在WinCE環境下需要10 s左右。因此,實時性基本達到實際需要,但若考慮在線監測(需要機載設備)的實時性、安全性,必須要提高硬件平臺的層次并進一步優化算法。
3 結束語
針對民航發動機監測點硬故障特點,采用分階段閾值檢測的方法進行診斷,能夠快速準確地判斷是否出現硬故障。實際測試驗證了該方法的正確性。采用SF_BP3神經網絡模型對監測點軟故障進行診斷,該模型訓練收斂速度快、殘差小,其訓練結果與實際運行采集數據有很高的吻合度,可作為軟故障診斷依據。
實際硬件資源低于此配置,故對網絡復雜度和性能造成影響,從而進一步對故障監測精度特別是在飛行階段臨界點的故障監測產生了一定影響。雖然BP網絡可以一定程度地自我修正,但是也以犧牲計算速度為代價。可見,監測算法應用測試效果與實際運行硬件平臺等有著密切的關系。
[1] 薛薇,郭迎清.航空發動機控制系統多傳感器軟故障檢測研究[J].計算機測量與控制,2007,15(4):585-587.
[2] 曹曦.基于神經網絡的傳感器故障診斷仿真與實驗研究[D].上海:上海交通大學,2001.
[3] 張加圣,應英,應勇.航空發動機故障監控系統的設計與軟件實現[J].測控技術,2008,27(2):65-68.
[4] 姚華,單貴平,孫健國.基于卡爾曼濾波器及神經網絡的發動機故障診斷[J].航空動力學報,2008,23(6):1111-1117.
[5] 劉建,馮雷星.某型航空發動機容錯控制仿真研究[J].電子測量技術,2010,33(5):22-25.
[6] 薛薇,郭迎清,李睿.航空發動機狀態監視、故障診斷研究及驗證[J].推進技術,2011,32(2):271-275.
[7] Talebi H A,Khorasani K,Tafazoli S.A recurrent neural-network-based sensor and actuator fault detection and isolation for nonlinear systems with application to the satellite's attitude control subsystem[C]// IEEE Transactions on Neural Networks,2009.
[8] 徐濤,王祁.一種神經網絡預測器在傳感器故障診斷中的應用[J].傳感技術學報,2005,18(2):235-237.
[9] 孫姜燕,徐艷玲.飛機發動機故障的多參數預測模型[J].計算機工程與應用,2012,48(13):240-243.
Study on the Fault Detection Method for the Condition Monitoring Points of Civil Aviation Engines
The safety and security of the civil aircraft engines mainly rely on equipping numerous monitoring points for monitoring the conditions of the engines.It is necessary to use appropriate method to detect the faults occuring in the monitoring points.The hard faults are diagnosed by using phased threshold method,the flight phases are divided in accordance with the difference of the angle of aircraft throttle level,and corresponding detection threshold is set for each phase.For the soft faults,due to the particularity and slowness of their variation,the model for normal monitoring point is established with BP neural network,through comparing the data graphics in normal running and the graphics of actual running,to determine whether there is a fault.The simulations indicate that the detection thresholds for hard fault diagnosis can includes normal operation output of all monitoring points in each phase;and BP network can also clearly reflect actual working conditions for soft faults.
Civil aircraft engine Condition monitoring Fault detection Intelligent control WinCE Residual analysis BP network
TP391+.5
A
修改稿收到日期:2014-01-13。
陳維興(1981-),男,2007年畢業于東北大學檢測技術與自動化裝置專業,獲碩士學位,講師;主要從事自動控制方面的研究。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01
