智能碾壓監測系統在平寨水庫堆石壩的應用
2014-03-26 06:47:02,
水利建設與管理 2014年2期
,
(貴州省水利投資(集團)有限責任公司, 貴陽 550003)
隨著社會經濟和科學技術的發展,尤其是填筑碾壓設備的不斷更新,混凝土面板堆石壩作為水庫大壩主要壩型之一,因其具有因地制宜、就地取材、節省投資、環保節能等優勢,近幾年,在我國水庫建設中得到廣泛應用。施工中填筑碾壓質量的控制,目前還是以碾壓過程監控和壓后土工檢測為主。但是,在傳統填筑碾壓施工過程中,因為碾壓軌跡無法實時顯示,碾壓過程數據無法記錄,所以對于鋪料厚度、碾壓遍數、碾壓搭接、行走速度等碾壓參數控制,只能依靠機手的主觀判斷和經驗來實現,監理只能旁站靠眼睛和記憶來監管,且壓后土工檢測也只是在個別區域進行,無法保證整個作業面壓實質量實現均勻性和可靠性。
為加強壩體碾壓質量過程控制,貴州省平寨水庫大壩施工中,做到碾壓施工實時引導、填筑碾壓參數實時采集,實現了碾壓作業全過程智能監測、碾壓參數的自動記錄和自動分析。
1 工程概況
貴州省平寨水庫工程位于長江流域烏江水系三岔河平寨河段,總庫容10.89億m3,年調水量5.50億m3。水庫大壩為混凝土面板堆石壩,最大壩高162.70m,壩頂長362m,壩頂寬10.60m,填筑工程量約530萬m3,筑壩材料為灰巖,比重2650~2710kg/m3。平寨水庫是一座以灌溉和城鄉供水為主,兼顧發電等綜合利用的大型水利工程。
2 智能碾壓監測系統介紹
2.1 系統組成
智能碾壓監測系統由GPS基準站組件、振動壓路機安裝組件兩大部分構成。GPS基準站組件包括GPS主機、天線、數傳電臺,GPS基準站架設在控制點上,實時給壓路機上的GPS接收機發送差分信號,使智能碾壓監測系統能夠實時獲得厘米級的壓路機三維位置信息; 安裝組件包括GPS接收機、數據接收無線電臺、顯示控制器、壓實傳感器以及連接線纜,其安裝方法參見圖1。黔中水利樞紐工程建立了1套GPS基站,安裝了4套振動壓路機組件。

圖1 智能碾壓監測系統安裝部件示意圖
2.2 系統工作原理
系統運行時,架設在控制點上的GPS基準站,實時向壓路機上的接收器發送差分信號,安裝在振動壓路機頂部的GPS接收機和無線電接收器,接收到GPS衛星信號和基站發送的差分信號時,進行實時厘米級定位,并將當前所處三維位置、碾壓遍數、行走速度、作業區域等信息傳遞到安裝在駕駛室的顯示控制器上; 同時,裝在壓路機振動輪上的壓實傳感器,也實時將壓實度(CMV值)、振動頻率等數據傳輸到顯示控制器,使機手能夠實時知道碾壓施工信息,指導機手操作(參見圖2、圖3)。
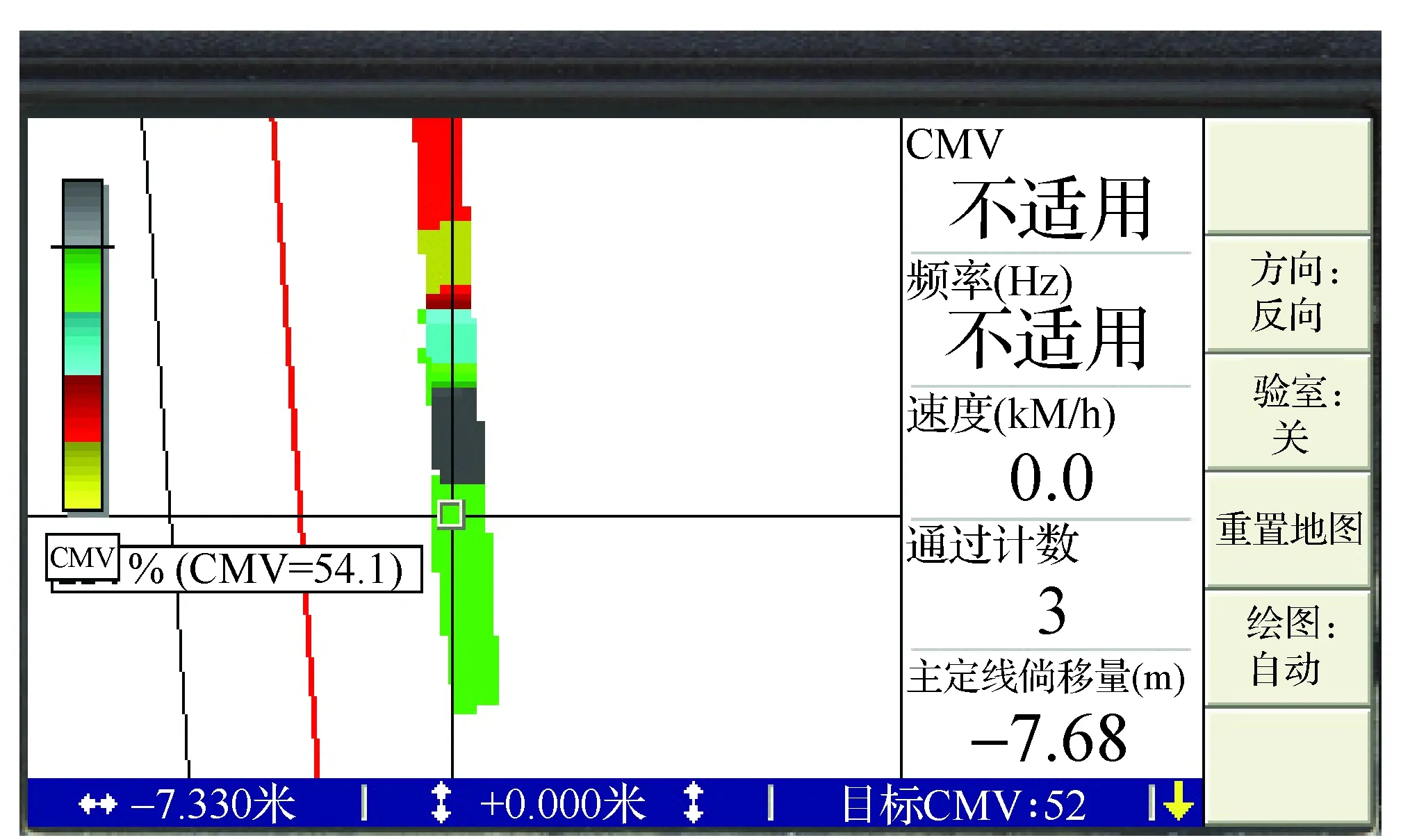
圖3 壓路機駕駛室內顯示控制器
當一個作業單元或指定作業區結束后,可以利用安裝在壓路機上的打印機及時打印出碾壓報告,報告中包含碾壓遍數、攤鋪厚度、壓實度,以及未達到設定目標值的薄弱區域等信息。同時提取數據,將數據導入到專業的Site Vision Office軟件中,能迅速進行碾壓質量分析、建立三維數字模型、保存工程信息。
2.3 系統特點
傳統的碾壓過程控制,主要依賴于機手的操作經驗,從而容易出現漏壓、過壓的情況,碾壓完成后,質量檢測部門才能按照相應的檢測方法進行質量抽檢,但由于檢測方法耗時長,抽檢點密度小,所檢測結果不能全面反映整個作業面的壓實情況; 而智能碾壓監測系統能夠通過圖形和數據實時顯示碾壓過程,使機手無需再憑猜測和經驗施工,實時監測碾壓過程中存在的問題,便于及時的整改,加快施工進度。二者功效對比如上頁表所示。

傳統碾壓方式和智能碾壓監測系統碾壓的功效對比表
3 智能碾壓監測系統的應用
3.1 及時分析作業單元碾壓質量
在平寨水庫大壩填筑過程中,除了實時指導壓路機手操作外,還從多個方面及時提供作業單元碾壓施工質量數據。一個作業單元(每一作業層)填筑碾壓結束后,從壓路機控制系統中采集數據導入到SVO軟件中,可查看到碾壓過程中的所有內容,軟件自動生成各類信息報告,如分層碾壓遍數視圖、當前層高程視圖、CMV值視圖、單數碾壓數據報告等,還可以任意截取斷面圖查看分析碾壓質量,在數據閱讀器中可以顯示出各作業點厚度、行駛速度等信息。通過圖表數據分析,找出施工中存在的問題,及時補救糾偏,總結經驗,提高施工管理水平。
以高程1233m作業層碾壓結束后生成的圖表分析(見圖4、圖5),該作業單元碾壓持續時間從7月5日22點開始,到7月9日22點30分結束,碾壓8遍以上達到96%,平均高程達到1233m,但下游邊緣區域較低,通過目標CMV值看出,91%區域已壓實,壓路機行車速度過快。
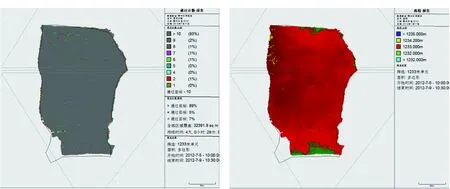
圖4 高程1233m作業單元碾壓遍數、高程視圖
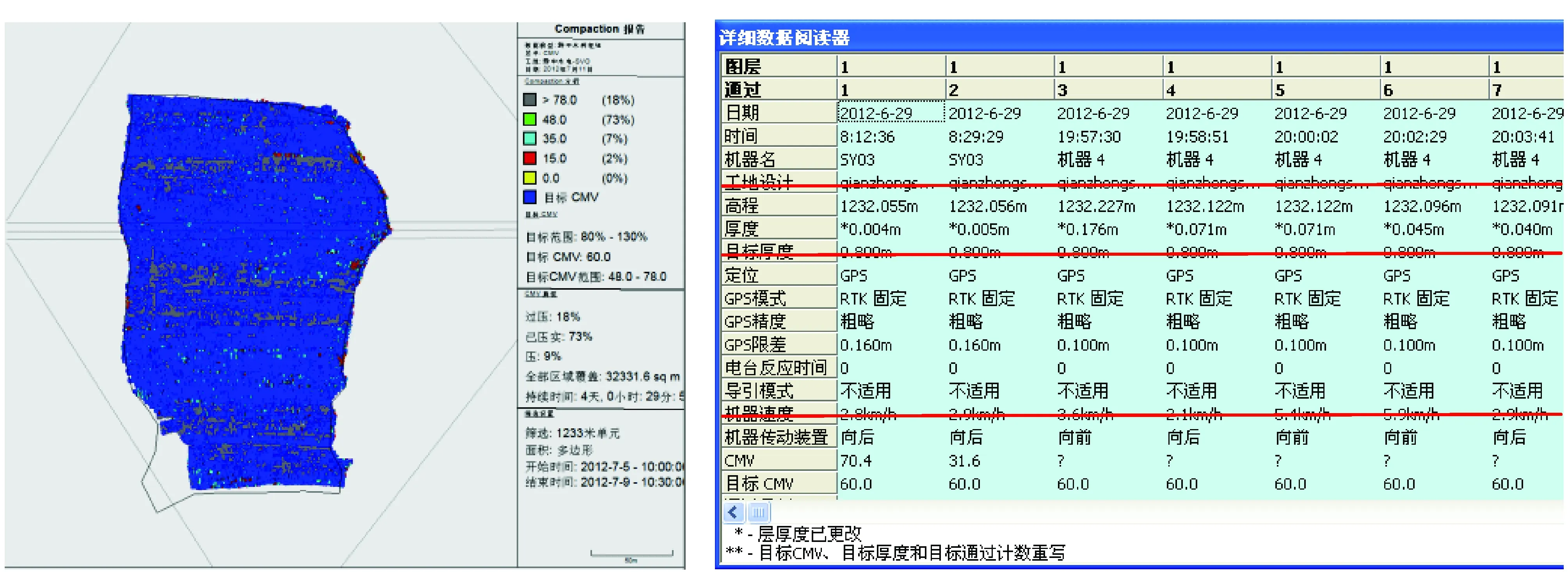
圖5 高程1233m作業單元CMV值、數據閱讀器視圖
3.2 直觀便捷捕獲碾壓信息
壓路機分層碾壓過程數據記錄下來后,可為后期的分析、統計、管理提供海量的基礎信息。對于智能碾壓監測系統采集的原始數據,如果把作業面看成一個數據模型的話,任意點選模型上其中一個單元格,詳細信息都顯示出來,還可以直接從SVO軟件中導出作業面表面。將SVO軟件中導出的表面導入到TBC軟件中,TBC軟件的三維表面顯示功能可以直觀地查看每月、每天、每時的填筑過程數據。軟件還可以自動計算分層填筑工程量、每時段填筑工程量等工程量信息,以供施工進度管理參考。
圖6是2012年1~4月每月底填筑表面的三維模型,圖中可以直觀地看到:1月的填筑面積較小,高程變化不大; 從2月開始,填筑面積增大; 3、4月,主要填筑的是大壩上游區,壩體填筑速度較快。
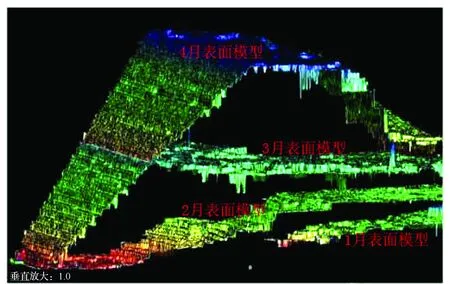
圖6 大壩填筑三維表面模型側視圖(2012年1~4月)
圖7是2012年3月表面模型視圖,從圖可以看出,主堆石區迎水面3月的填筑較快,高程從1178m填筑到1230m左右,并可從圖中直觀看到每個填筑單元的高程變化和位置平移。
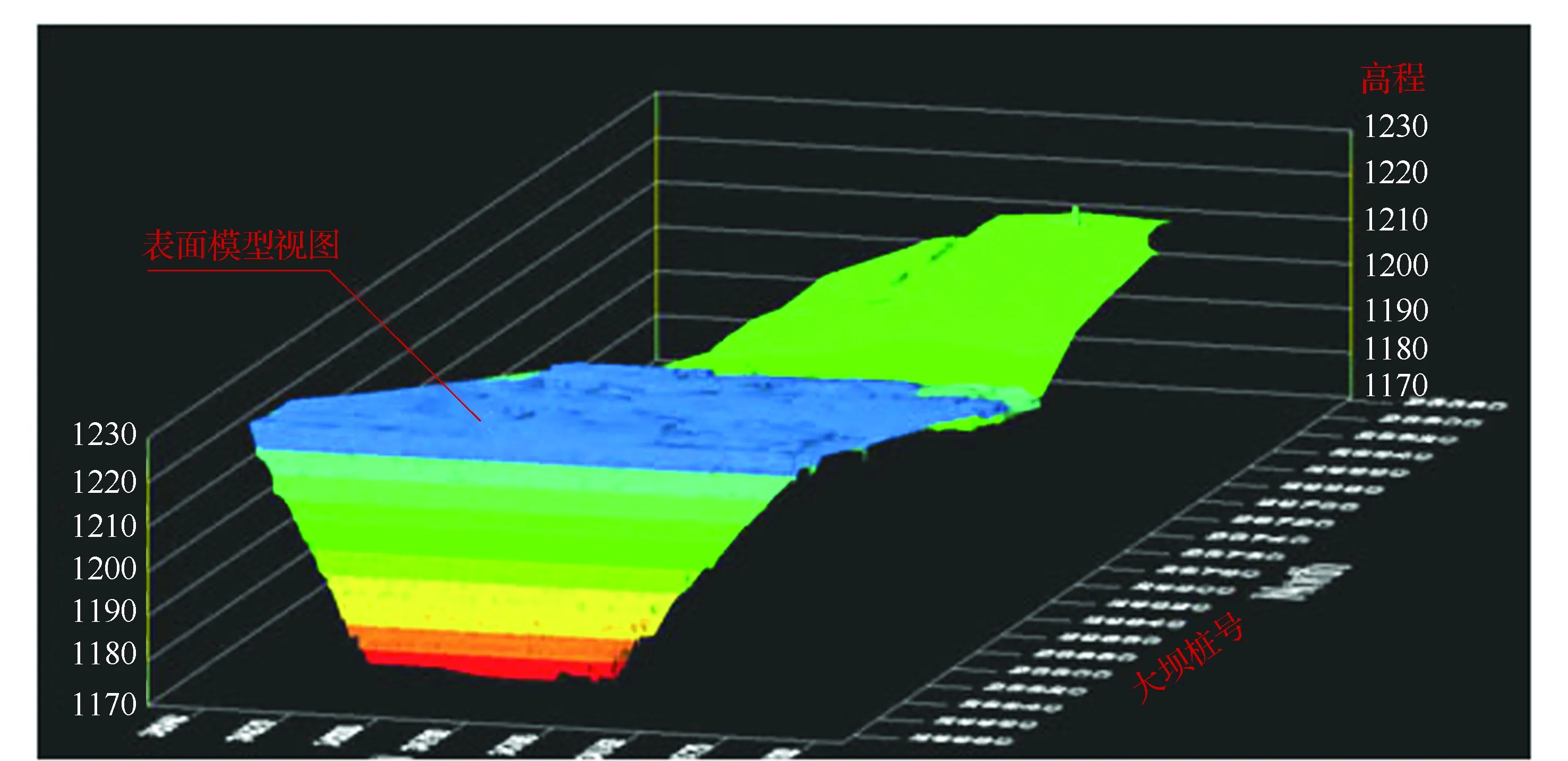
圖7 大壩2012年3月填筑表面模型圖
3.3 CMV值(壓實度值)用于碾壓質量控制指標分析
智能碾壓監測系統的CMV值,是通過壓路機振動輪上加裝的加速度傳感器,實時記錄振動時基層反彈硬度計算出來的數值,系統采用CMV值來表達碾壓的密實質量。在實際應用中,由于受壩料類別、材料粒徑、材料級配、填筑層厚、含水量、碾壓設備類型等因素影響,導致智能碾壓監測系統采集的CMV值不同,因此在碾壓作業前,應根據不同的填料和碾壓設備,確定CMV目標值。
在本工程碾壓試驗時,選擇干密度檢驗合格的實驗區,利用壓路機弱振約20~25m長,系統自動采集具有代表性的CMV值,作為工程控制的CMV目標值,見圖8。經試驗,選取的主次堆石區的CMV目標值為52,過渡料區的CMV目標值為65。
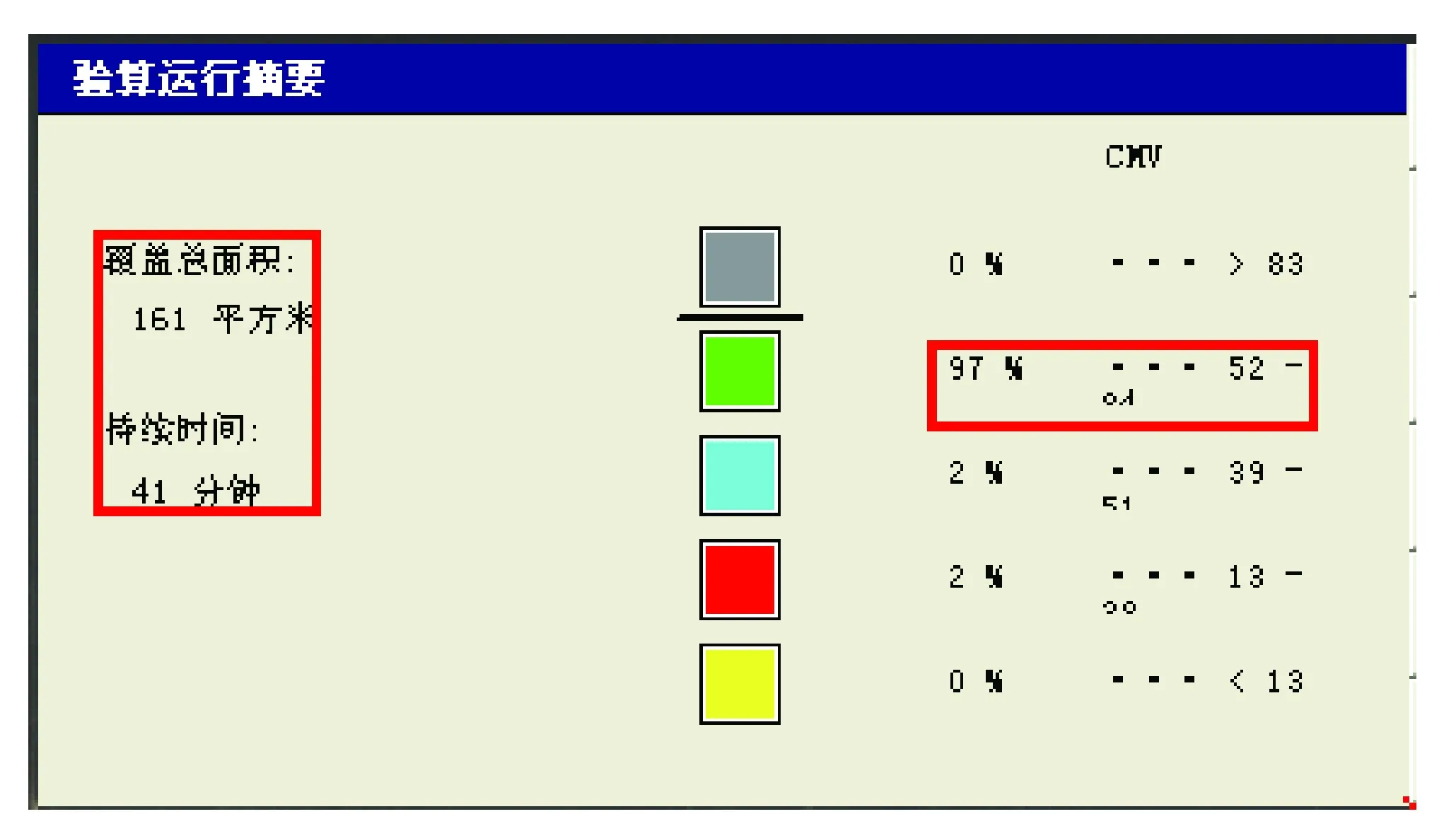
圖8 主堆石區CMV目標值選取試驗視圖
采用挖坑灌水法測定的干密度值,與智能碾壓監測記錄的同一位置的CMV值進行對比:?選擇主堆石區1234.0~1269.2m高程,挖坑法測定干密度36組,平均值2.19g/cm3(設計值為2.16 g/cm3),最小值2.13g/cm3,不合格點2個,占5.6%; 采集對應位置的CMV值,平均值76.5,最小值54.3,小于目標值點2個,占5.6%,詳見圖9; ?選擇次堆石區1233.6~1268m高程,挖坑法測定干密度值30組,平均值2.15g/cm3(設計值為2.11 g/cm3),最小值2.09g/cm3,不合格點1個,占3.3%; 采集對應位置的CMV值30組,平均值73.4,最小值53.9,均大于目標值,見圖10; ?選到過渡料區1250.0~1260.4m高程,采用挖坑法測定干密度值18組,平均值2.22g/cm3(設計值為2.21 g/cm3),最小值2.15g/cm3,不合格點3個,占11.1%; 采集對應位置的CMV值18組,平均值77.8,最小值64.1,小于目標值點2個,占11.1%,詳見圖11。
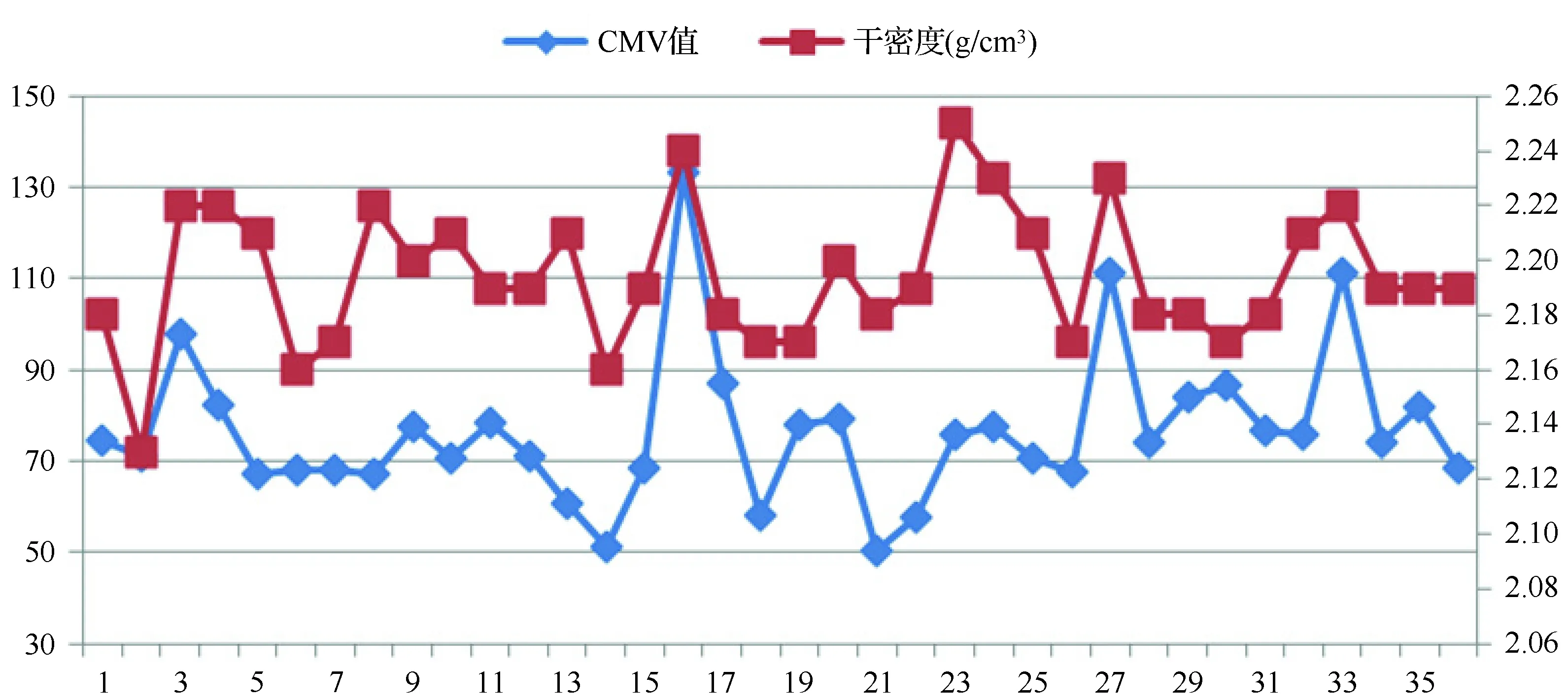
圖9 主堆石區1234.0~1269.2m干密度值與CMV值對比
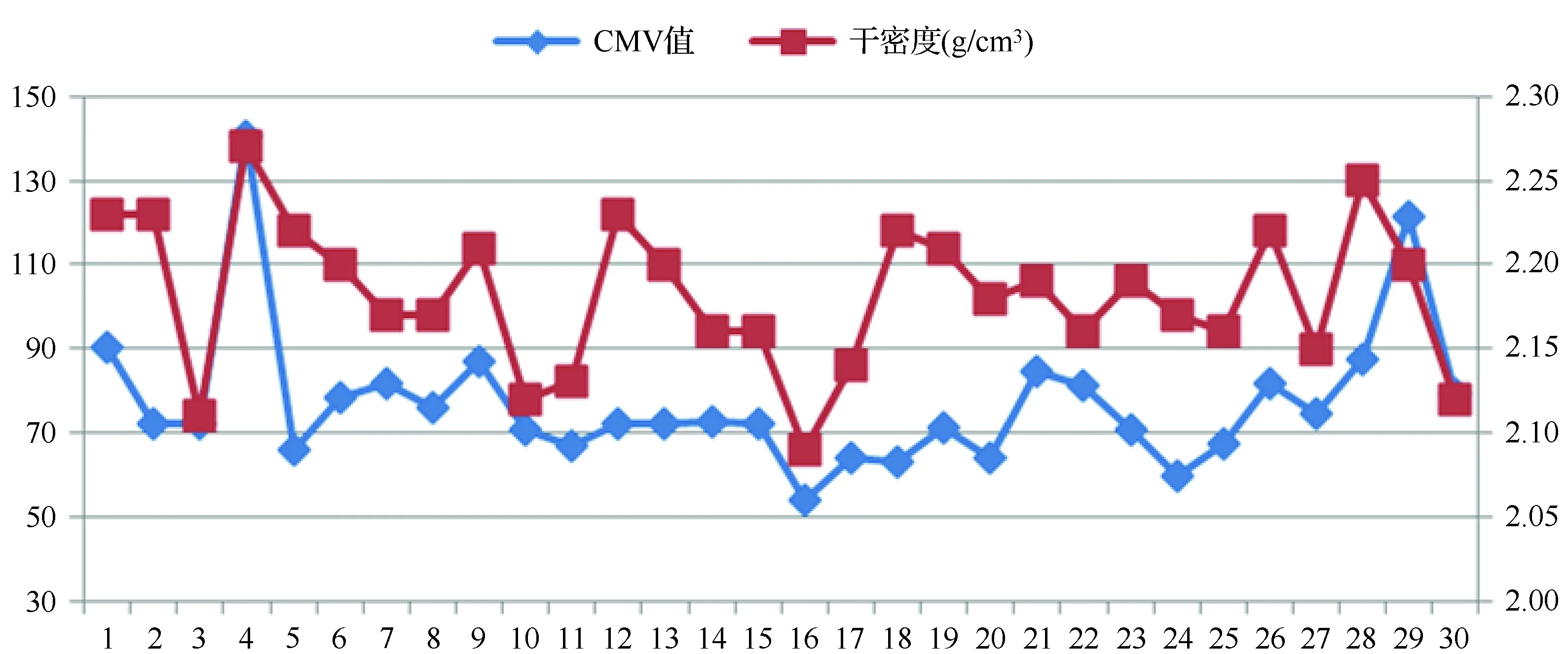
圖10 次堆石1233.6~1268m干密度值與CMV值對比
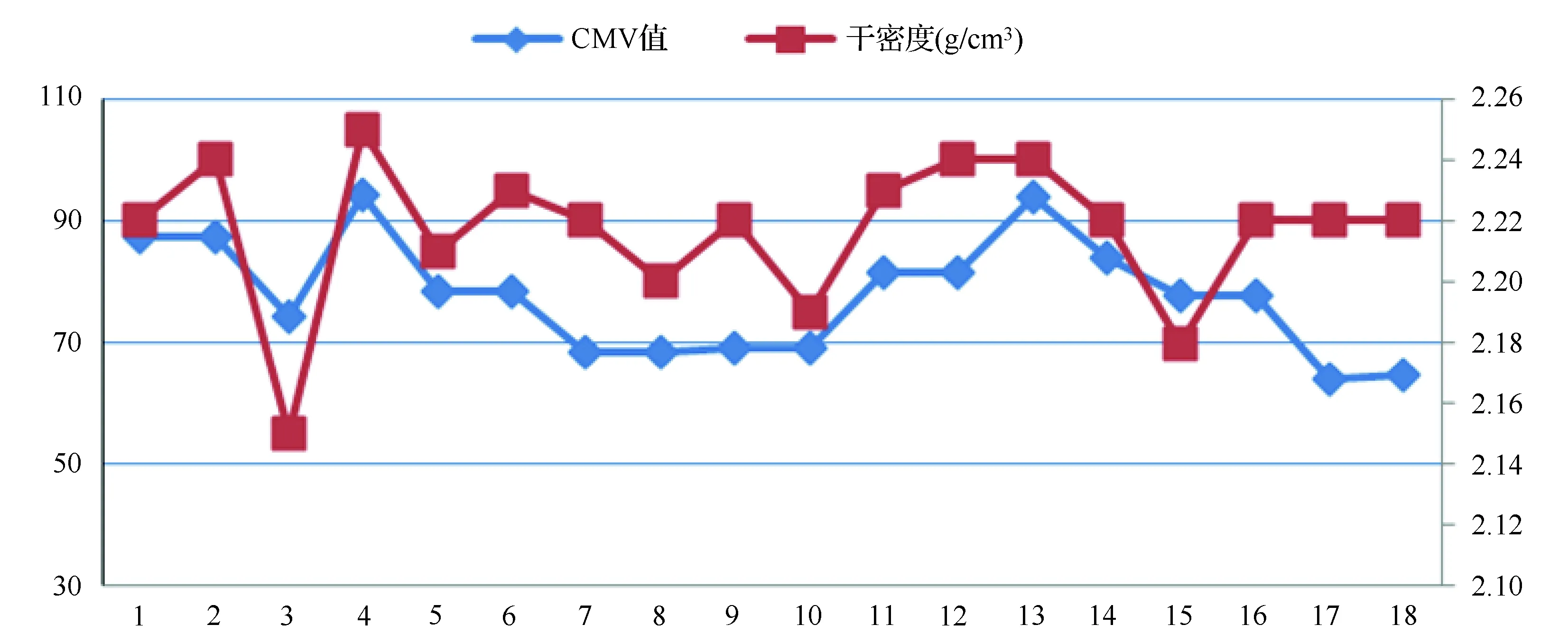
圖11 過渡料區1250.0~1260.4m數據趨勢
經過干密度值與CMV值進行對比分析,可以看出:干密度值相對高的點CMV值也相對較高,干密度值相對低的點CMV值也相對較低,即二者的變化趨勢基本一致,具有一定的關連性; 主次堆石區CMV值97%大于目標值52,平均值為目標值的135%,過渡料區CMV值89%大于目標值65,平均值為目標值的119%,說明CMV目標值的選擇基本合理,用該目標值來控制碾壓質量是可行的。
4 系統性能缺欠及應對措施
4.1 GPS信號不穩定
壩體填筑碾壓初期,由于環境、地形的影響,智能碾壓控制系統GPS信號在固定時段有時不穩定,甚至采集不到數據,需要架設中繼站加以解決。
4.2 碾壓設備調配不方便
由于壩體分區域碾壓,按照施工工藝,不同區域使用不同型號的壓路機,不能竄壓和隨意調配壓路機,可采取對壓路機編號加強管理,制定碾壓控制實施細則,指導施工以保證壓實質量。
4.3 碾壓數據傳輸不通暢
碾壓時上傳的碾壓數據,由于沒有工程信息化管理平臺作支撐,不能實時查看和統一管理,在工程實際應用中,可同步建成工程信息化管理平臺,加強碾壓作業的數字化、信息化管理。
5 結 語
平寨水庫混凝土面板堆石壩現已填筑425萬m3,完成了設計工程量的80%,通過智能碾壓監測系統的使用,對于大壩填筑質量控制、加快施工進度等作用明顯:
a.系統能夠準確實時地提供鋪填厚度、行走速度、行走軌跡、碾壓遍數、振動頻率、CMV值(反映壓實度的值)等施工參數,不僅為壓路機機手及時提供操作信息,也為監理工程師提供了質量檢查控制依據,同時減少旁站人員,能及時發現碾壓過程中的質量問題,及時進行整改糾偏。
b.智能碾壓控制系統,通過CMV值和直觀顯示的碾壓遍數,有效避免出現漏壓、欠壓現象,可以適當減少頻次,加快工程進度。
c.系統可以完整記錄和儲存填筑碾壓過程中的施工參數,通過碾壓信息建立三維模型,提高了施工管理水平和管理效率,為大壩碾壓施工質量評價和事后檢查提供可靠的依據。
另外,由于大壩所處位置山高谷深,在前期填筑時衛星信號受擋衰減變弱,缺失部分信息,盼在以后工程中,通過技術手段解決這一問題,確保工程信息完整。
1 于子忠,黃增剛.智能壓實過程控制系統在水利水電工程中的試驗性應用研究[J].水利水電技術,2012(12):44~47.
2 張智明.智能化振動壓路機及技術現狀[J].中外公路,2004(8):20~22.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
建材發展導向(2021年9期)2021-07-16 07:11:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國房地產業(2016年2期)2016-03-01 01:25:48
